Нейро-компьютерный интерфейс как глобальный двигатель прогресса / Хабр
Нейро-компьютерный интерфейс (НКИ) (называемый также прямой нейронный интерфейс, мозговой интерфейс, интерфейс «мозг — компьютер») – устройство или принцип работы, предназначенный для обеспечения односторонней или двухсторонней связи между мозгом и электронным устройством.
Другими словами, НКИ — это некоторый механизм, позволяющий управлять техникой с помощью » силы мысли». Исследования этой области начались в 1970-х годах в Калифорнийском университете в Лос-Анджелесе (UCLA). В середине 1990-х были разработаны устройства, которые позволили восстановить поврежденные функции слуха, зрения, а также утраченные двигательные навыки.
Одной из главных причин, по которой НКИ станет катализатором научно-технического прогресса, является широкая область применимости данной технологии.
Одно из самых перспективных направлений развития НКИ является медицина. НКИ позволит создавать протезы с высокой отзывчивостью, манипулировать подобного рода протезами можно будет наравне с здоровыми органами. Вопросами создания и имплантирования различных искусственных устройств для восстановления нарушений функций нервной системы и сенсорных органов занимается область неврологии – нейропротезирование. Самым распространенным нейропротезом является кохлеарный имплантат, который используется для компенсирования потери слуха некоторым пациентам с выраженной или тяжёлой степенью нейросенсорной (сенсоневральной) тугоухости.
НКИ позволит создавать протезы с высокой отзывчивостью, манипулировать подобного рода протезами можно будет наравне с здоровыми органами. Вопросами создания и имплантирования различных искусственных устройств для восстановления нарушений функций нервной системы и сенсорных органов занимается область неврологии – нейропротезирование. Самым распространенным нейропротезом является кохлеарный имплантат, который используется для компенсирования потери слуха некоторым пациентам с выраженной или тяжёлой степенью нейросенсорной (сенсоневральной) тугоухости.
Однако медицинские НКИ могут найти применение не только в медицине. На основе технологий нейропротезирования в последствии возможно создание систем управления гуманоидными роботами. Так, например, в 2000-ом году, исследовательской группе Мигеля Николесиса удалось воспроизвести движение передних конечностей обезьяны. Система работала в реальном времени и использовалась для управления роботом по средствам интернет соединения. На практике подобного рода роботы могут быть использованы при высокоточных работах, в местах, где прибывание человека невозможно.
Развитие НКИ в сторону распознания мыслительных образов должно дать мощный толчек в развитии областей, связанных с моделированием и проектированием. НКИ позволит в значительной степени ускорить и упростить процесс создания моделей и чертежей. Ощутимый прогресс в данном направлении имеет группа NeuroG; группа занимается созданием алгоритмов для распознания зрительных образов, а 25 апреля 2011 года состоялась первая публичная демонстрация работы устройства по распознанию мыслительных образов. К сожалению, на тот момент, устройство распознавало только 4 изображения.
Следующий способ практического применения НКИ трудно отнести к какой либо конкретной области. Речь идет о хранении и передачи знаний и опыта. Развитие НКИ в данном направлении позволит сократить длительность обучения, а также позволит создавать продвинутые базы знаний, которые будут включать в себя опыт и знания других специалистов в данной предметной области.
Так как работа НКИ связана с непосредственным воздействием на нервную систему человека, наиболее вероятным способом организации двусторонней связи человека с компьютером будет имплантирование модуля способного перехватывать, принимать (при необходимости обрабатывать) и передавать сигналы нервной системы.
Согласно опросу, проведенному в интернете, 72% опрошенных считают, что НКИ окажут положительное влияние на развитие науки-техники и жизни целом, 10% ответили отрицательно, 18% затруднились дать ответ на вопрос, однако на вопрос о согласии на имплантирование модуля, позволяющего использовать НКИ, положительно ответили только 35%, 24% ответили отказом, 32% затруднились дать ответ, 9% предложили свои варианты. В результате беседы с респондентами были выявлены основные причины, по которым люди затруднились ответить или дали отрицательный ответ:
- Не желание людей становится »киборгами», т. е. модифицировать свое тело искусственным способом;
- Страх потерять свободу воли и стать подконтрольным хакеру.
Список литературы
- Староха А. В., Давыдов А. В. Кохлеарная имплантация — перспективное направление слухопротезирования//Бюллетень сибирской медицины.— 2004.— №4.— С.34—38
- Carmena, J.M., Lebedev, M.A., Crist, R.
 E., O’Doherty, J.E., Santucci, D.M., Dimitrov, D.F., Patil, P.G., Henriquez, C.S., Nicolelis, M.A.L. (2003) Learning to control a brain-machine interface for reaching and grasping by primates. PLoS Biology, 1: 193—208.
E., O’Doherty, J.E., Santucci, D.M., Dimitrov, D.F., Patil, P.G., Henriquez, C.S., Nicolelis, M.A.L. (2003) Learning to control a brain-machine interface for reaching and grasping by primates. PLoS Biology, 1: 193—208. - Еникеева, Альфия «Российские учёные научат компьютер читать мысли», «Наука и технологии России», 2011-04-27
- Miguel Pais-Vieira, Mikhail Lebedev, Jing Wang, Miguel A. L. Nicolelis «A Brain-to-Brain Interface for Real-Time Sharing of Sensorimotor Information», 2013-02-28
 E., O’Doherty, J.E., Santucci, D.M., Dimitrov, D.F., Patil, P.G., Henriquez, C.S., Nicolelis, M.A.L. (2003) Learning to control a brain-machine interface for reaching and grasping by primates. PLoS Biology, 1: 193—208.
E., O’Doherty, J.E., Santucci, D.M., Dimitrov, D.F., Patil, P.G., Henriquez, C.S., Nicolelis, M.A.L. (2003) Learning to control a brain-machine interface for reaching and grasping by primates. PLoS Biology, 1: 193—208.ПО МОЕМУ ХОТЕНЬЮ… БЕРЛИНСКИЙ НЕЙРО-КОМПЬЮТЕРНЫЙ ИНТЕРФЕЙС
В известной русской народной сказке Емеля поймал щуку, но, пожалев, выпустил ее обратно в реку. В благодарность поведала ему щука волшебные слова: «По щучьему веленью, по моему хотенью…». Как только произнесет их Емеля, вокруг начинаются чудеса: он и пальцем не шевелит, а ведра сами домой идут, топор сам дрова колет, печь Емелю к царю везет. Насколько далек вымысел от действительности и не может ли сказочный сюжет послужить стимулом для ученых попытаться воплотить его в жизнь?
Общая модель нейро-компьютерного интерфейса.
Нейро-компьютерный интерфейс.
Еще один нейро-компьютерный интерфейс (НКИ).
На картинах распределения электрических потенциалов на поверхности головы видно, что за несколько долей секунды до выполнения действия правой рукой отрицательный потенциал повышается в левой половине коры головного мозга и наоборот.
Общая схема обработки данных в БНКИ.
Мысленно имитируя движение правой или левой рукой, пользователь направляет курсор в левое или правое поле в верхней части экрана.
Работая на виртуальной пишущей машинке, пользователь за несколько шагов выбирает нужную букву.
Приложение обратной связи БНКИ «мысленный теннис».
Приложение обратной связи БНКИ «мысленный диггер».
Приложение обратной связи БНКИ «мысленный тетрис».
Работая с приложением «виртуальная рука», пациент приобретает навыки управления электромеханическим протезом: учится поднимать его, сгибать в локте, сжимать и разжимать пальцы.
‹
›
Открыть в полном размере
Мысль может стать физической силой
Для лентяя Емели езда на печи была обычной прихотью, а для многих парализованных и прикованных к постели людей возможность передвигаться, найти хоть какой-то способ общаться с окружающими равносильна возможности жить.
Намерение выполнить определенное действие возникает в недрах нашего мозга и превращается в электрический потенциал. Его распределение в пространстве и времени создает определенную картину, которую можно отобразить с помощью электроэнцефалографа 1. В настоящее время созданы особые системы, получившие название нейро-компьютерных интерфейсов
Получив возможность мысленным усилием направлять курсор в нужную область экрана монитора, пациенты сумеют печатать сообщения и пользоваться Интернетом. Есть много прикладных программ для здоровых людей, и с помощью НКИ человек в дополнение к привычным коммуникационным каналам (зрению, слуху, осязанию, движению) получит канал «восприятия», «мышления».
Есть много прикладных программ для здоровых людей, и с помощью НКИ человек в дополнение к привычным коммуникационным каналам (зрению, слуху, осязанию, движению) получит канал «восприятия», «мышления».
Как все начиналось
Еще в 1929 году немецкому врачу-нейрофизиологу Хансу Бергеру впервые удалось снять показания электроэнцефалографа и подтвердить гипотезу о том, что действия человека всегда связаны с повышением активности отдельных зон коры головного мозга. С тех пор многие исследователи неоднократно хотели научиться «читать мысли», пытаясь расшифровать электроэнцефалограмму. Но мешали технические причины: недостаточное пространственное разрешение электроэнцефалографов (то есть не удавалось в подробностях получить картину распределения потенциалов), а также отсутствие возможности хранить и обрабатывать в режиме реального времени огромные массивы данных.
Последнее десятилетие прошлого века прошло под знаком стремительного развития информационных технологий, давших в распоряжение ученых высокоскоростные ЭВМ с большой памятью. Прогресс в области цифровой обработки сигналов и статистического анализа, а также новые теоретические знания о нейронных сетях открыли перед научными коллективами перспективу практической реализации различного рода нейро-компьютерных интерфейсов (НКИ).
Прогресс в области цифровой обработки сигналов и статистического анализа, а также новые теоретические знания о нейронных сетях открыли перед научными коллективами перспективу практической реализации различного рода нейро-компьютерных интерфейсов (НКИ).
В большинстве предлагаемых систем для управления используются электромагнитные сигналы, поступающие от мышц, двигающих глазное яблоко, и мимических мышц. Такой интерфейс показал высокую эффективность, но его нельзя в полной мере назвать нейро-компьютерным. Более того, для пациентов, полностью утративших двигательные функции, его применимость сильно ограничена.
Первые эксперименты с НКИ начали проводить в Уодсфорд-центре Нью-Йоркского университета в Олбани. Руководитель центра Джон Волпов определил нейро-компьютерный интерфейс как систему для управления исполнительным устройством (компьютером, инвалидной коляской или электромеханическим протезом) посредством мысленного усилия, которое не зависит от периферийных нервов и мышц, представляющих собой обычные каналы передачи информации от головного мозга.
Основным приложением НКИ, созданного в Уодсфорд-центре, стала виртуальная клавиатура, на которой парализованные люди учатся генерировать сигналы определенной частоты в определенных зонах головного мозга. С помощью этих сигналов они отклоняют вверх или вниз курсор, движущийся по экрану монитора с постоянной скоростью слева направо.
Пациент в реальном времени наблюдает, как устройство анализирует создаваемые им пространственно-временны’ е картины, и стремится подвести курсор к нужному полю в правой части экрана. В каждом из полей содержатся группы букв, цифр или знаков препинания. Когда группа выбрана, то есть в ней оказывается курсор, символы из нее перераспределяются по остальным полям. Далее пользователь снова ведет курсор в поле, содержащее нужный символ, и за несколько повторов (от 3 до 7) выбирает нужный символ, который затем появляется в строке в верхней части экрана. Процесс тренировки не прост, занимает много времени, но результат стоит того.
Еще две самые известные системы НКИ разработаны в Граце (Австрия) и в Тюбингене (Германия). НКИ, созданный в Австрии и основанный на использовании схожных нейрофизиологических признаков, сегодня помогает парализованному пациенту управлять протезом кисти руки. Период тренировки, которая сопровождалась дальнейшими исследованиями и постоянным совершенствованием системы, продлился более года.
НКИ, созданный в Австрии и основанный на использовании схожных нейрофизиологических признаков, сегодня помогает парализованному пациенту управлять протезом кисти руки. Период тренировки, которая сопровождалась дальнейшими исследованиями и постоянным совершенствованием системы, продлился более года.
Берлинский НКИ
Система, разработанная сотрудниками Института компьютерных архитектур и программного обеспечения Общества Фраунхофера и нейрофизиологами берлинской клиники Шарите, принципиально отличается от предшественников. Чтобы пользоваться Берлинским нейро-компьютерным интерфейсрм (БНКИ), пациенту не нужно обучаться. Здесь обучается сама система, а пользователь, начиная работать с ней, должен лишь показать машине, как он собирается ею управлять.
Во время тренировочных сессий пользователь должен был нажимать клавиши правой или левой рукой или представлять себе такое движение. По результатам 4-5 сессий, каждая из которых длится около 5 минут, удается собрать до 2000 примеров, или по 1000 для каждой руки.
Затем начинается обработка ЭЭГ. Для этого в непрерывном потоке данных выделяют небольшой отрезок, непосредственно предшествующий нажатию клавиши. Выполнение каждого задания заставляет большое количество нейронов соответствующего двигательного центра коры головного мозга инициировать определенный импульс и направить его к мышцам. При этом в пределах некоторой зоны на поверхности головы возникает отрицательный потенциал, который, почти неуловимо для человеческого глаза, отражается в данных ЭЭГ. Однако такое повышение отрицательного потенциала легко обнаруживается на картинах распределения электрического поля, усредненных после многократных повторений движений левой и правой руки. При намерении совершить движение левой рукой отрицательный потенциал возникает в области правого полушария, а перед движением правой рукой — в области левого полушария. Было установлено, что заметное повышение потенциала происходит за 0,5-0,4 секунды до действительного выполнения команды. Это объясняется тем, что для выработки сигнала, способного достичь мышц руки, нервные клетки соответствующего двигательного центра должны накопить определенное количество энергии, то есть на некоторое время «успокоиться», а процесс понижения их индивидуальной активности как раз и отражается в росте отрицательного потенциала. После посылки импульса также происходит задержка порядка 0,15 секунды — за это время он достигает соответствующих мышц.
После посылки импульса также происходит задержка порядка 0,15 секунды — за это время он достигает соответствующих мышц.
Берлинский НКИ, таким образом, может заранее распознать команду на совершение мышечного движения. Это свойство позволяет применять его в ситуациях, когда для обеспечения безопасности требуются превентивные меры. В частности, он окажется полезным в системах безопасности автомобилей: перед возможным столкновением еще до нажатия водителем педали тормоза подушки или ремни безопасности будут приведены в состояние готовности.
После того как собрано достаточное количество примеров, включается автоматическая процедура обучения. Она производит анализ примеров и вырабатывает модель управления системой, наиболее подходящую для данного пользователя. Для этого подбираются характерные признаки, несущие информацию о различных командах управления, и рассчитывается математическая функция, способная по каждому набору признаков генерировать команду управления.
Весь процесс обучения системы занимает не более двух минут, в течение которых пользователь может отдохнуть и приготовиться к совершенно новому и необычному способу общения с компьютером и ощущению, что компьютер «понимает» его намерения еще до того, как тот сам успевает их осмыслить. Теперь всего лишь мысль о движении левой или правой рукой производит эффект, как при истинном движении. Самое главное для пользователя — не запутаться в собственных мыслях, которые пытаются обогнать одна другую, а для НКИ — успевать обрабатывать и реализовывать сигналы, полученные от пользователя, в реальном времени.
Теперь всего лишь мысль о движении левой или правой рукой производит эффект, как при истинном движении. Самое главное для пользователя — не запутаться в собственных мыслях, которые пытаются обогнать одна другую, а для НКИ — успевать обрабатывать и реализовывать сигналы, полученные от пользователя, в реальном времени.
В связи с большими потоками информации БНКИ сконструирован с использованием нескольких компьютеров, объединенных в локальную сеть. В такой конфигурации БНКИ способен решать двоичную задачу, то есть выбирать один вариант из двух возможных. Он, например, с точностью 75-90% за 0,2-0,1 секунды до того, как пользователь действительно нажал бы соответствующую клавишу, устанавливает, левой или правой рукой тот хочет выполнить движение.
Следует заметить, что не всегда система в состоянии безошибочно идентифицировать связь между некоторым набором признаков и соответствующей командой управления. Более высокой надежности достигают, разделяя сложную задачу на несколько простых. Например, задача распознавания набора команд «влево», «вправо», «на месте» разбивается на две более простые: «движение», «покой» и «лево», «право». Формирование команды управления происходит по логическому правилу: если «движение», тогда «лево» или «право», иначе «покой».
Например, задача распознавания набора команд «влево», «вправо», «на месте» разбивается на две более простые: «движение», «покой» и «лево», «право». Формирование команды управления происходит по логическому правилу: если «движение», тогда «лево» или «право», иначе «покой».
Можно управлять движением простого объекта по экрану монитора, практиковаться в несложных компьютерных играх. Пациенту доступны также некоторые программы из области виртуальной реальности.
От теории к практике
В БНКИ привлекает разнообразие прикладных программ (приложений) обратной связи. Они содержат объекты, которыми управляют, не нажимая клавиши или передвигая мышь. Для этого служит команда, сформированная другим компьютером. Обратная связь в этом случае очень важна: пользователь должен все время видеть реакцию системы на свои мысленные приказы.
Из приложений БНКИ можно выделить две категории: игровые и реабилитационные. Игровые программы предназначены для здоровых пользователей, а реабилитационные позволяют пациенту с ограниченными двигательными возможностями поддерживать связь с окружающим миром. Среди игровых программ на сегодня есть адаптированные версии известных компьютерных игр, таких, как теннис, диггер или тетрис. Среди реабилитационных программ следует выделить «мысленную пишущую машинку» и «виртуальную руку».
Среди игровых программ на сегодня есть адаптированные версии известных компьютерных игр, таких, как теннис, диггер или тетрис. Среди реабилитационных программ следует выделить «мысленную пишущую машинку» и «виртуальную руку».
На начальных этапах освоения системы рекомендуется использовать простейшую прикладную программу «бегущий крест». Курсор в виде небольшого креста движется по экрану в соответствии с результатами обработки сигналов электроэнцефалографа. Вертикальная координата курсора изменяется при поступлении команды «движение», а горизонтальная координата — при поступлении команды «право» или «лево». Координаты курсора обновляются с частотой 25 Гц. Таким образом, положение курсора позволяет визуализировать, насколько правильно система распознает управляющие команды. При мысленном желании подвинуть левую (правую) руку курсор должен попасть в левое (правое) верхнее поле, изменяя при этом его окраску.
Такого рода двоичное управление успешно используется в виртуальной пишущей машинке. Пациент выбирает одну из панелей (левую или правую), в которой содержится требуемая буква, то есть как во время процедуры обучения системы. После этого имеющиеся в ней знаки распределяются снова по двум панелям, и пользователь вновь делает выбор, пока не останется одна буква. «Машинка» позволяет пациенту увидеть и почувствовать, как реализуются его мысленные команды.
Пациент выбирает одну из панелей (левую или правую), в которой содержится требуемая буква, то есть как во время процедуры обучения системы. После этого имеющиеся в ней знаки распределяются снова по двум панелям, и пользователь вновь делает выбор, пока не останется одна буква. «Машинка» позволяет пациенту увидеть и почувствовать, как реализуются его мысленные команды.
В нижней части экрана есть поле обратной связи, с помощью которого пользователь-новичок контролирует свои действия, наблюдая за отклонением указателя влево и вправо. По достижении некоторого навыка это поле отключают, так как лишние объекты на экране будут скорее мешать, чем помогать.
С помощью этой прикладной программы пользователь может набирать текст со скоростью от 7 до 15 знаков в минуту. Если при этом дополнительно применить технологию Т9, которая предлагает наиболее вероятные продолжения слова, то работа станет еще эффективнее.
Наиболее удобным и естественным для человека устройством ввода информации в компьютер считается мышь. Поэтому резонно возникает вопрос о способе непрерывно двигать курсор, как происходит при перемещении мыши по коврику. Таким способом, в частности, управляют курсором в компьютерной игре «теннис», первые версии которой появились еще во времена монохромных зеленых экранов (тогда, правда, курсор перемещали, нажимая клавиши со стрелками).
Поэтому резонно возникает вопрос о способе непрерывно двигать курсор, как происходит при перемещении мыши по коврику. Таким способом, в частности, управляют курсором в компьютерной игре «теннис», первые версии которой появились еще во времена монохромных зеленых экранов (тогда, правда, курсор перемещали, нажимая клавиши со стрелками).
Для реализации подобной игры вполне подходит БНКИ. Во время игры «мяч» движется по экрану, отскакивая от боковых и верхнего краев, а по нижнему краю передвигается «ракетка», управляемая «силой мысли», так, чтобы в нужный момент перехватить «мяч». Разумеется, в такой «мысленный теннис» могут сражаться два игрока одновременно.
Следующей ступенью будет задача перемещения курсора по всей плоскости экрана.
Другим приложением БНКИ стала игра «диггер». Курсор представляет собой путешественника (зеленый кружок с «носом», указывающим направление движения). Он должен как можно быстрее пройти тоннели подземного лабиринта. Диггер движется по тоннелю с постоянной скоростью, пока не «упрется» в стену. В местах ответвлений пользователь может дать одну из команд: «налево» или «направо».
В местах ответвлений пользователь может дать одну из команд: «налево» или «направо».
Сценарий, аналогичный используемому в игре «диггер», можно применить к управлению инвалидной коляской. «Умная» коляска, оснащенная видеокамерой для определения местонахождения и обнаружения препятствий, интерпретирует следующие команды: «поверни налево (направо) при следующей возможности», «двигайся вперед (назад) при отсутствии помех» и т. п. Такого рода управление уже разрабатывается и применяется для пациентов со сложными травмами и заболеваниями спинного мозга, правда пока в единичных случаях.
Игра в «мысленный тетрис» требует от НКИ способности распознавать более двух групп сигналов (например, движение левой и правой рукой для кодирования команд движения вправо и влево, а также ногой для вращения фигурки).
Очень интересное приложение, которое можно реализовать с помощью БНКИ, относится к серии виртуальной реальности. «Виртуальная рука», изображенная на экране, позволяет пациенту приобрести навык управления электромеханическим протезом. БНКИ распознает и формирует команды управления для таких движений, как подъем руки в плечевом суставе, сгибание ее в локте, сжимание и разжимание кисти. Более дифференцированные движения распознать пока не удается, поскольку двигательные центры мышц предплечий и пальцев расположены близко друг к другу и электроэнцефалограф не может различить картины распределения потенциалов, формируемых этими центрами.
БНКИ распознает и формирует команды управления для таких движений, как подъем руки в плечевом суставе, сгибание ее в локте, сжимание и разжимание кисти. Более дифференцированные движения распознать пока не удается, поскольку двигательные центры мышц предплечий и пальцев расположены близко друг к другу и электроэнцефалограф не может различить картины распределения потенциалов, формируемых этими центрами.
А кто исправит ошибку?
Человеческий мозг обладает естественными функциями, которые не нужно вырабатывать в процессе длительной тренировки: одна из них — генерация так называемых потенциалов ошибки, когда человек обнаруживает, что развитие событий идет не так, как он хотел бы. Если НКИ ошибается в своей попытке угадать желание пользователя и делает в игре неправильный ход, то возникает одна из таких ошибочных ситуаций. «Недовольство» пользователя принятым системой решением вызывает появление потенциала ошибки, и если система распознает этот потенциал в течение 0,4-0,5 секунды после принятия последнего решения, то заменяет его на противоположное. В итоге пользователь подсознательно замечает, что что-то произошло, но не успевает осмыслить, поскольку уже видит на экране желаемую ситуацию.
В итоге пользователь подсознательно замечает, что что-то произошло, но не успевает осмыслить, поскольку уже видит на экране желаемую ситуацию.
Что нас ждет впереди?
Чтобы НКИ стали более совершенными, разработчикам нужна помощь, в первую очередь от фундаментальной науки. Но не стоит забывать и о потенциальных пользователях — именно они зададут в ближайшем будущем основные пути развития систем управления и коммуникации с помощью «силы мысли».
Дальнейшие разработки систем НКИ будут вестись на основе более глубокого изучения нейрофизиологических свойств и особенностей «поведения» соответствующих зон головного мозга. Это позволит значительно расширить диапазон команд управления. Современная нейрология располагает довольно неточными «картами» головного мозга. Недостаточно изучены функции и назначения отдельных регионов. К наиболее хорошо изученным можно отнести двигательный и осязательный ареалы коры, и здесь мы можем с точностью до 3-7 мм указать на поверхности мозга расположение нервных клеток, которые несут ответственность за ту или иную часть тела.
Не стоит на месте и техника. Сейчас идет разработка новых, более простых и удобных для пациентов и пользователей сенсорных технологий снятия электроэнцефалограмм и с этой целью создают бесконтактные электроды.
Новые компьютерные игры помогут уже в ближайшем будущем использовать НКИ для определения уровня стресса, страха или умственной нагрузки. Благодаря новинкам в области цифровой обработки сигналов и машинного обучения появятся средства точного распознавания и перевода биоэлектрических импульсов в команды. Тогда перед НКИ откроется еще более широкий спектр применений. Они станут незаменимы в области безопасности, а также в ситуациях, требующих сверхскоростных реакций, например для осуществления экстренного торможения. Рассматривается возможность применять системы НКИ для отслеживания состояния (степени усталости, умственного перенапряжения, сонливости) лиц, несущих повышенную нервную нагрузку, например водителей автобусов, пилотов самолетов и космонавтов.
В интернациональном коллективе авторов собрались ученые разных специальностей: математики, программисты, биолог. Такое содружество оказалось очень плодотворным, и в результате получено новое средство для общения с окружающим миром.
Такое содружество оказалось очень плодотворным, и в результате получено новое средство для общения с окружающим миром.
1 В современных электроэнцефалографах используют множество поверхностных электродов из специального сплава, чувствительного к предельно малым токам. Электроды вмонтированы в эластичную тряпичную шапочку и снимают напряжения, возникающие между определенной точкой поверхности головы и некоторой контрольной точкой. Затем сигнал усиливают, преобразуют в цифровой вид и обрабатывают на компьютере.
2Об интерфейсах рассказывается в заметке, помещенной после статьи.
Иллюстрация «Общая модель нейро-компьютерного интерфейса».
Общая модель нейро-компьютерного интерфейса представляет собой замкнутый поток информации. При намерении совершить какое-либо действие у пользователя повышается электрическая активность соответствующих зон головного мозга. Эти сигналы снимаются электроэнцефалографом и в виде цифровых данных поступают в компьютер, где производится вычисление признаков сигнала, характерных для того или иного мысленного желания. Далее набор признаков разделяют по типам, и компьютер вырабатывает команду, управляющую исполнительным устройством (компьютерной программой, инвалидной коляской, протезом и пр.). Пользователь в режиме реального времени наблюдает за реакцией системы на свое мысленное действие.
Далее набор признаков разделяют по типам, и компьютер вырабатывает команду, управляющую исполнительным устройством (компьютерной программой, инвалидной коляской, протезом и пр.). Пользователь в режиме реального времени наблюдает за реакцией системы на свое мысленное действие.
Иллюстрация «Нейро-компьютерный интерфейс».
В нейро-компьютерном интерфейсе, созданном в Уодсфорд-центре, пациент учится направлять движущийся с постоянной скоростью курсор к полю, содержащему нужный символ. За несколько повторов можно выбрать символ, который затем включится в текст, появляющийся в верхней части экрана.
Иллюстрация «Еще один нейро-компьютерный интерфейс (НКИ)».
На кривых 27 каналов электроэнцефало-графа (F3-O1) и четырех дополнительных каналов (электромиограммы левой и правой руки EMGL и EMGR, а также электроокулограммы EOGh и EOGv движения глаза) представлены три примера выполнения задания здоровым пользователем. Он последовательно нажимал клавишу правой, левой и вновь левой рукой. Активность мышц руки, выполняющей движение, заметна в каналах EMG (в черных рамках). Если не произвести соответствующую обработку сигналов, на кривых ЭЭГ невозможно увидеть связь между намерением выполнить действие (в цветных рамках) и самим по-следующим действием (вершины треугольников).
Активность мышц руки, выполняющей движение, заметна в каналах EMG (в черных рамках). Если не произвести соответствующую обработку сигналов, на кривых ЭЭГ невозможно увидеть связь между намерением выполнить действие (в цветных рамках) и самим по-следующим действием (вершины треугольников).
Иллюстрация «Общая схема обработки данных в БНКИ».
Общая схема обработки данных в БНКИ может быть представлена как своеобразный конвейер с несколькими «рабочими», каждый из которых выполняет специфическую задачу и передает информацию другому. Сбор и хранение данных ЭЭГ могут быть поручены первому компьютеру, который является сервером. На втором — производятся выбор признаков, их классификация по типам (например, «есть движение — нет движения» или «движение вправо — движение влево») и, наконец, формирование команды управления. Готовая команда посылается виртуальным сервером на третий ПК, в котором она играет роль команд, поступающих с устройств ввода, и управляет работой игровой или реабилитационной прикладной программы. Реакция на сигналы пользователя отражается на мониторе, то есть возникает обратная связь, позволяющая системе НКИ и пользователю адаптироваться друг к другу.
Реакция на сигналы пользователя отражается на мониторе, то есть возникает обратная связь, позволяющая системе НКИ и пользователю адаптироваться друг к другу.
Нейро-компьютерный интерфейс — Новые перспективные технологии
Здравствуйте! Меня зовут Краснолобов Юрий Сергеевич Цель нашего занятия: познакомится с устройством, позволяющим управлять компьютером при помощи головного мозга. В настоящее время существуют различное оборудование, которое позволяет снимать различные показания с голов ного мозга. А раз существуют такие технологии, значит человечество рано или поздно должно было дойти и до того, чтобы использовать эти приборы, чтобы управлять компьютером и другими подобными устройствами при помощи головного мозга. Итак, нейро-компьютерный интерфейс (НКИ) — это физический интерфейс приёма или передачи сигналов между живыми нейронами биологического организма (например, мозгом животного) с одной стороны, и электронным устройством (например, компьютером) с другой стороны. Интерфейсы «мозг — компьютер» (BCI) основаны на регистрации электрической активности отдельных групп нейронов и переводе интегрального сигнала в управляющую команду для внешнего устройства. Командовать таким образом можно чем угодно — фигуркой на экране, собственным протезом или удалённым роботом. Разобраться в данной теме нам поможет презентация, расположенная ниже. Нейрокомпьютерный интерфейсТакже предоставляю видеофильм где показано как нейро-компьютеры вторгаются и в Россию. Видео YouTubeМетоды регистрации электрической активности мозга были разработаны в 1929 году немецким физиологом Гансом Бергером. Уже в тридцатые годы электроэнцефалография стала восприниматься не только как диагностическая процедура, а как нечто гораздо более универсальное и перспективное. С середины девяностых начался настоящий бум развития нейрокомпьютерных интерфейсов. Они стали излюбленной темой фантастов, но реальность порой превосходила ожидания. К примеру, роботы стали слушаться не только мысленных приказов от находящегося поблизости человека, но и воспринимать отправляемые через интернет команды от удалённых на многие километры лабораторных животных. Всё это время предпринимались попытки приспособить BCI для более актуальных практических задач. Основным направлением была выбрана реабилитационная медицина. С помощью интерфейса «мозг–компьютер» многие научные коллективы пытались вернуть утратившим конечности или парализованным людям способность к движению. За последние два десятилетия огромные суммы денег были инвестированы в исследования в области НКИ как в Европейском Союзе, так и в США. Несмотря на это, и на то, что технология кажется перспективной результаты пока не оправдали данных затрат.
Что касается последнего вопроса, ответ на него уходит корнями в западную культуру. Это имеет отношение к легендам о Големе и Франкенштейне. Нейрокомпьютерный интерфейс в Сколково Мишель Махарбиз, создатель первого в мире устройства для дистанционного управления насекомыми, разработал вместе с коллегами из Калифорнийского университета в Беркли новый универсальный интерфейс «мозг — компьютер». Из-за малых размеров он получил название «нейропыль». Повсеместное распространение персональных компьютеров сильно ускорило прогресс в данной области. Одним из первых практических применений BCI считается «виртуальная клавиатура» Фарвела и Дончина, созданная в 1988 году. Виртуальная клавиатура Как думаете, есть ли такой вариант, что исследования в области НКИ не имеют никаких перспектив? Я думаю, нет. Тем не менее, для того чтобы данные исследования были успешными, необходимо признать принципиальную невозможность управления внешними устройствами головным мозгом напрямую, как в свое время была признана принципиальная невозможность летать, используя приделанные к рукам и ногам крылья, что в конечном итоге привело к разработке летательных аппаратов тяжелее воздуха. В настоящее время исследование в области НКИ все еще находится на стадии околонаучных испытаний и ошибок, аналогичных совершенным “портным из Ульма” (Альбрехтом Берблингером), который в 1811 попытался взлететь при помощи силы своих мышц, прыгнул с колокольни и упал в Дунай. Перед прохождением теста и интерактивных заданий настоятельно рекомендую ознакомится со следующими источниками информации: Вики статья Нейро-компьютерный интерфейс; Нейро-компьютер (по желанию). Не кисни..и смотри не повисни!Стань богаче…знаниями!Угадай, что не так?Тест «Нейро-компьютерный интерфейс». Нейро-компьютерный интерфейсТакже вы можете оставить комментарий в блоге: Новые перспективные технологии (НКИ) Спасибо за внимание! |

 Появилась даже идея читать мысли и использовать ЭЭГ для мысленного управления внешними устройствами.
Появилась даже идея читать мысли и использовать ЭЭГ для мысленного управления внешними устройствами. В нескольких публикациях об испытаниях на животных сообщается о двух — четырех обезьянах предположительно способных использовать НКИ. В исследованиях на людях во всем мире насчитывается менее 10 пациентов за последние 20 лет, для которых приложение НКИ было полезно хотя бы на какое-то время.
В нескольких публикациях об испытаниях на животных сообщается о двух — четырех обезьянах предположительно способных использовать НКИ. В исследованиях на людях во всем мире насчитывается менее 10 пациентов за последние 20 лет, для которых приложение НКИ было полезно хотя бы на какое-то время. Головной мозг не был создан Богом или в процессе эволюции для прямого управления движениями; мозг просто не способен выполнять такую работу; в противном случае не требовалось бы наличие двигательной периферии. Точка зрения о том, что мы можем силой мысли управлять чем-либо (например, курсором мыши), сильно недооценивает самостоятельную роль, которую играют спинной мозг, многочисленные подкорковые центры, и механика мышечно-костного аппарата. При помощи этих структур каждое связанное с жизнью движение создается заново скорее как самоорганизованная, саморегулируемая система, а не как контролируемая центральным органом управления двигательной зоны коры головного мозга или лобной доли.
Головной мозг не был создан Богом или в процессе эволюции для прямого управления движениями; мозг просто не способен выполнять такую работу; в противном случае не требовалось бы наличие двигательной периферии. Точка зрения о том, что мы можем силой мысли управлять чем-либо (например, курсором мыши), сильно недооценивает самостоятельную роль, которую играют спинной мозг, многочисленные подкорковые центры, и механика мышечно-костного аппарата. При помощи этих структур каждое связанное с жизнью движение создается заново скорее как самоорганизованная, саморегулируемая система, а не как контролируемая центральным органом управления двигательной зоны коры головного мозга или лобной доли. Это одновременно способ более точного управления любой электроникой «силой мысли» и новый диагностический метод с высочайшей разрешающей способностью.
Это одновременно способ более точного управления любой электроникой «силой мысли» и новый диагностический метод с высочайшей разрешающей способностью.
В центре внимания науки и техники: интерфейсы мозг-компьютер
Основные факты Интерфейсы мозг-компьютер позволяют людям управлять машинами, используя свои мысли. Технология все еще в значительной степени экспериментальна, но ее возможности огромны. Например, это могло бы помочь людям с параличом восстановить контроль над своими конечностями и позволить военнослужащим управлять дроном без помощи рук на поле боя.
Тем не менее, создание прямой связи между мозгом и машиной может вызвать опасения. Например, это может дать пользователям несправедливые преимущества за счет улучшения физических и когнитивных способностей. Также хакеры могли украсть данные, связанные с сигналами мозга человека.
В этом обзоре мы рассмотрим эти и другие вопросы политики, связанные с этой технологией.
Перейти к основным моментам
Основные моментыПочему это важно
Интерфейсы мозг-компьютер позволяют людям управлять машинами, используя свои мысли. Эти интерфейсы могут помочь людям с ограниченными возможностями, а также улучшить взаимодействие человека с компьютером. Например, военные могут управлять дроном без помощи рук на поле боя. Тем не менее, технология остается в значительной степени экспериментальной и вызывает вопросы о безопасности, этике и справедливости.
Технология
Что это? Интерфейс мозг-компьютер (BCI) позволяет человеку управлять внешним устройством с помощью сигналов мозга. BCI могут помочь людям с ограниченными возможностями и улучшить возможности национальной обороны, среди прочего. Например, исследователи разрабатывают BCI, которые позволяют людям с параличом произносить слова на экране компьютера или восстанавливать контроль над своими конечностями. Кроме того, исследователи разрабатывают роботизированные конечности, управляемые BCI, которые могут дать пользователям чувство осязания. BCI также могут расширить возможности человека, позволяя ему, например, управлять компьютеризированным оборудованием, используя свои мысли (см. рис. 1).
BCI могут помочь людям с ограниченными возможностями и улучшить возможности национальной обороны, среди прочего. Например, исследователи разрабатывают BCI, которые позволяют людям с параличом произносить слова на экране компьютера или восстанавливать контроль над своими конечностями. Кроме того, исследователи разрабатывают роботизированные конечности, управляемые BCI, которые могут дать пользователям чувство осязания. BCI также могут расширить возможности человека, позволяя ему, например, управлять компьютеризированным оборудованием, используя свои мысли (см. рис. 1).
Рис. 1. Примеры приложений BCI включают в себя правописание для связи, интерфейс смартфона, дрон, управляемый BCI, и роботизированную конечность.
Как это работает? Новые пользователи BCI часто проходят повторяющийся процесс обучения. Пользователь учится подавать сигналы, которые BCI распознает, а BCI преобразует сигналы для управления устройством с помощью машинного обучения.
Как правило, НКИ подключаются к мозгу двумя способами: через имплантированные или носимые устройства (см. рис. 2). Имплантированные BCI часто хирургическим путем прикрепляются непосредственно к ткани головного мозга. Они могут быть более подходящими для пользователей с тяжелыми нервно-мышечными расстройствами или физическими травмами. Например, человек с параличом может использовать имплантированный BCI, прикрепленный к определенным нейронам, чтобы восстановить точный контроль над конечностью. Имплантированные BCI измеряют сигналы непосредственно от мозга, уменьшая помехи от других тканей. Однако они представляют хирургический риск, такой как инфекция и отторжение. Некоторые имплантированные BCI снижают риск, размещая электроды на поверхности мозга. Этот метод называется электрокортикографией (ЭКоГ).
Носимым BCI часто требуется колпачок с проводниками, которые измеряют мозговую активность, обнаруживаемую на коже головы. Носимый BCI может подойти для таких целей, как дополненная и виртуальная реальность, игры или управление промышленным роботом. Большинство носимых BCI используют электроэнцефалографию (ЭЭГ) для измерения электрической активности мозга. Новый метод — функциональная спектроскопия в ближней инфракрасной области (fNIRS) — пропускает свет в ближней инфракрасной области через череп для измерения кровотока, что может указывать на такую информацию, как намерения пользователя.
Большинство носимых BCI используют электроэнцефалографию (ЭЭГ) для измерения электрической активности мозга. Новый метод — функциональная спектроскопия в ближней инфракрасной области (fNIRS) — пропускает свет в ближней инфракрасной области через череп для измерения кровотока, что может указывать на такую информацию, как намерения пользователя.
Чтобы повысить мобильность, исследователи разрабатывают BCI, которые используют портативные методы для сбора данных, например, беспроводную ЭЭГ. Эти методы позволяют пользователям управлять смартфоном или другим устройством, свободно перемещаясь.
Рис. 2. Примеры имплантированных (слева) и носимых (справа) НКИ.
Насколько он зрелый? Большинство BCI являются экспериментальными. Исследователи впервые протестировали носимый НКИ в начале 1970-х годов и впервые имплантировали НКИ человеку в конце 19-го.90-е. Исследования BCI значительно расширились в 21 веке, что привело к публикации тысяч исследовательских работ. По данным одной ведущей компании BCI, менее 40 человек во всем мире имплантировали BCI, все они экспериментальные. Одним из основных препятствий на пути развития НКИ является то, что каждый человек генерирует уникальные мозговые сигналы. Другая проблема заключается в сложности измерения этих сигналов.
По данным одной ведущей компании BCI, менее 40 человек во всем мире имплантировали BCI, все они экспериментальные. Одним из основных препятствий на пути развития НКИ является то, что каждый человек генерирует уникальные мозговые сигналы. Другая проблема заключается в сложности измерения этих сигналов.
Исторически исследования BCI были сосредоточены на биомедицинских применениях, таких как помощь людям, получившим инвалидность в результате инсульта, физической травмы или неврологического расстройства. В апреле 2021 года устройство, в котором используется беспроводная гарнитура ЭЭГ, чтобы помочь пациентам, перенесшим инсульт, восстановить контроль над рукой и кистью, стало первым носимым BCI для реабилитации, получившим разрешение на продажу от Управления по санитарному надзору за качеством пищевых продуктов и медикаментов. Ряд других носимых и имплантируемых ИМК для медицинских целей в настоящее время проходят клинические испытания.
Исследователи также разрабатывают приложения для использования в военных целях и для систем, правильная работа которых имеет решающее значение для безопасности. Например, исследователи из Национального управления по аэронавтике и исследованию космического пространства использовали BCI, чтобы определить, когда пилоты и авиадиспетчеры с большей вероятностью допускают ошибки. Министерство обороны профинансировало исследования BCI для управления дронами без помощи рук. И Федеральное авиационное управление изучило, как с медицинской точки зрения сертифицировать пилотов, которые однажды смогут использовать BCI для управления самолетами.
Например, исследователи из Национального управления по аэронавтике и исследованию космического пространства использовали BCI, чтобы определить, когда пилоты и авиадиспетчеры с большей вероятностью допускают ошибки. Министерство обороны профинансировало исследования BCI для управления дронами без помощи рук. И Федеральное авиационное управление изучило, как с медицинской точки зрения сертифицировать пилотов, которые однажды смогут использовать BCI для управления самолетами.
Что беспокоит? Некоторые исследователи отмечают возможные юридические последствия и последствия для безопасности BCI. Например, кибератаки вызывают озабоченность, поскольку хакеры могут использовать вредоносное ПО для перехвата данных сигналов мозга, хранящихся на смартфоне. Министерство торговли в настоящее время рассматривает вопрос о том, может ли экспорт BCI представлять угрозу национальной безопасности. Например, иностранные противники могут получить военное или разведывательное преимущество. Его решение может повлиять на то, как технология используется и распространяется за рубежом.
Его решение может повлиять на то, как технология используется и распространяется за рубежом.
Исследователи также обдумывали социальные и этические последствия. Зарегистрированная стоимость носимых BCI колеблется от сотен до тысяч долларов, что может привести к неравному доступу. Кроме того, обучение использованию некоторых типов BCI требует обучения, что может обременять пользователей. Исследователи также предположили, что перевод сигналов мозга в речь с помощью BCI может причинить вред, если он будет неточным. Например, неточный перевод может указывать на юридическое или медицинское согласие, которое человек не собирался давать.
Возможности
- Помощь людям с ограниченными возможностями. Люди, парализованные физическими травмами или неврологическими расстройствами, могут использовать BCI для общения и восстановления контроля над своими конечностями.
- Расширение возможностей человека и взаимодействие человека с компьютером. BCI могут ускорить и упростить взаимодействие между людьми и машинами в таких областях, как оборона и космос. Кроме того, некоторые исследователи предположили, что роботы, управляемые BCI, могут помогать людям в опасных условиях, таких как угольные шахты.
- Содействие исследованиям мозга. Ученые могут использовать НКИ для лучшего понимания мозга. Некоторые исследователи использовали BCI для обнаружения эмоций пациентов в вегетативном или минимально сознательном состоянии.
 BCI могут ускорить и упростить взаимодействие между людьми и машинами в таких областях, как оборона и космос. Кроме того, некоторые исследователи предположили, что роботы, управляемые BCI, могут помогать людям в опасных условиях, таких как угольные шахты.
BCI могут ускорить и упростить взаимодействие между людьми и машинами в таких областях, как оборона и космос. Кроме того, некоторые исследователи предположили, что роботы, управляемые BCI, могут помогать людям в опасных условиях, таких как угольные шахты.Проблемы
- Технические и пользовательские проблемы. Каждый человек генерирует уникальные сигналы мозга, которые трудно четко измерить. Кроме того, обучение использованию BCI может потребовать значительной подготовки.
- Этическая основа. BCI могут вызвать вопросы о том, что представляет собой согласие, и о потенциальных несправедливых преимуществах, предоставляемых определенными человеческими улучшениями.
- Безопасность и конфиденциальность. BCI могут быть уязвимы для кибератак, которые раскрывают данные мозга или мешают работе устройства.

Политический контекст и вопросы
- Будут ли BCI развиваться в направлении коммерческого использования и использования пациентами, и кто будет нести расходы?
- Как должны регулироваться BCI, расширяющие возможности человека, и должны ли они вообще регулироваться?
- Какие этические проблемы могут возникнуть при использовании BCI и какие приложения могут представлять собой неэтичное или противоречивое использование BCI?
- Какие шаги могут помочь снизить потенциальные риски безопасности и конфиденциальности, связанные со сбором данных о сигналах мозга?
Для получения дополнительной информации свяжитесь с Карен Ховард по телефону (202) 512-6888 или по электронной почте [email protected].
Полный отчет
Полный отчет (2 страницы)
Доступный PDF (2 страницы)
Контакты ГАОИнтерфейсы мозг-компьютер в медицине — PMC
1. Вулпоу Дж.Р., Вулпоу Э.В., редакторы. Интерфейсы мозг-компьютер: принципы и практика. Издательство Оксфордского университета; Нью-Йорк, штат Нью-Йорк: 2012. [Google Scholar]
Вулпоу Дж.Р., Вулпоу Э.В., редакторы. Интерфейсы мозг-компьютер: принципы и практика. Издательство Оксфордского университета; Нью-Йорк, штат Нью-Йорк: 2012. [Google Scholar]
2. Видал Дж.Дж. К прямой связи мозг-компьютер. Annu Rev Biophys Bioeng. 1973; 2: 157–180. [PubMed] [Google Scholar]
3. Фетц Э.Э. Оперантное обусловливание деятельности корковых единиц. Наука. 1969;163(3870):955–958. [PubMed] [Google Scholar]
4. Элберт Т., Рокстро Б., Лутценбергер В., Бирбаумер Н. Биологическая обратная связь медленных корковых потенциалов. I. Электроэнцефалогр Клин Нейрофизиол. 1980;48(3):293–301. [PubMed] [Google Scholar]
5. Фарвелл Л.А., Дончин Э. Бессмысленные разговоры: к ментальному протезу, использующему потенциалы мозга, связанные с событиями. Электроэнцефалогр Клин Нейрофизиол. 1988;70(6):510–523. [PubMed] [Google Scholar]
6. Gastaut H. Электрокортикографическое исследование реактивности роландического ритма. Рев Нейрол (Париж) 1952;87:176–182. [PubMed] [Google Scholar]
7. Кульман В. Н. Тренировка обратной связи ЭЭГ: усиление соматосенсорной корковой активности. Электроэнцефалогр Клин Нейрофизиол. 1978;45(2):290–294. [PubMed] [Google Scholar]
Кульман В. Н. Тренировка обратной связи ЭЭГ: усиление соматосенсорной корковой активности. Электроэнцефалогр Клин Нейрофизиол. 1978;45(2):290–294. [PubMed] [Google Scholar]
8. Wolpaw J.R., McFarland D.J. Многоканальная связь мозг-компьютер на основе ЭЭГ. Электроэнцефалогр Клин Нейрофизиол. 1994;90(6):444–449. [PubMed] [Google Scholar]
9. Wolpaw J.R., McFarland D.J., Neat G.W., Forneris C.A. Интерфейс мозг-компьютер на основе ЭЭГ для управления курсором. Электроэнцефалогр Клин Нейрофизиол. 1991;78(3):252–259. [PubMed] [Google Scholar]
10. Wolpaw J.R., McFarland D.J. Управление двумерным сигналом движения с помощью неинвазивного интерфейса мозг-компьютер у людей. Proc Natl Acad Sci U S A. 2004;101(51):17849–17854. [бесплатная статья PMC] [PubMed] [Google Scholar]
11. Hochberg L.R., Serruya M.D., Friehs G.M. Нейронный ансамбль управления протезами человека с тетраплегией. Природа. 2006;442(7099):164–171. [PubMed] [Google Scholar]
12. Krusienski D. J., Shih J.J. Управление визуальной клавиатурой с помощью электрокортикографического интерфейса мозг-компьютер. Нейрореабилитация Нейроремонт. 2011;25(4):323–331. [Бесплатная статья PMC] [PubMed] [Google Scholar]
J., Shih J.J. Управление визуальной клавиатурой с помощью электрокортикографического интерфейса мозг-компьютер. Нейрореабилитация Нейроремонт. 2011;25(4):323–331. [Бесплатная статья PMC] [PubMed] [Google Scholar]
13. Vaughan T.M., Wolpaw J.R. Третье международное совещание по технологии интерфейса мозг-компьютер: изменить ситуацию. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):126–127. [PubMed] [Google Scholar]
14. Berger H. Uber das electrokephalogramm des menchen. Arch Psychiatr Nervenkr. 1929; 87: 527–570. [Google Scholar]
15. Ахтари М., Брайант Х.С., Мамалак А.Н. Проводимости трехслойного человеческого черепа. Мозг Топогр. 2000;13(1):29–42. [PubMed] [Академия Google]
16. Крусенски Д.Дж., Ши Дж.Дж. Управление интерфейсом мозг-компьютер с использованием стереотаксических глубинных электродов в гиппокампе и рядом с ним. Дж. Нейронная инженерия. 2011;8(2):025006. [Бесплатная статья PMC] [PubMed] [Google Scholar]
17. Shih J.J., Krusienski D.J. Сигналы от внутрижелудочковых глубинных электродов могут управлять интерфейсом мозг-компьютер. J Neurosci Методы. 2012;203(2):311–314. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Сигналы от внутрижелудочковых глубинных электродов могут управлять интерфейсом мозг-компьютер. J Neurosci Методы. 2012;203(2):311–314. [Бесплатная статья PMC] [PubMed] [Google Scholar]
18. Mellinger J., Schalk G., Braun C. Нейроизображение интерфейса мозг-компьютер (BCI) на основе MEG. 2007; 36(3):581–59.3. [Бесплатная статья PMC] [PubMed] [Google Scholar]
19. Ван Гервен М., Дженсен О. Модуляции внимания задней альфа-частицы как управляющий сигнал для двумерных интерфейсов мозг-компьютер. J Neurosci Методы. 2009;179(1):78–84. [PubMed] [Google Scholar]
20. Ли Дж. Х., Рю Дж., Джолеш Ф. А., Чо З. Х., Ю С. С. Интерфейс мозг-машина с помощью фМРТ в реальном времени: предварительное исследование роботизированной руки, управляемой мыслью. Нейроски Летт. 2009;450(1):1–6. [Бесплатная статья PMC] [PubMed] [Google Scholar]
21. Мак Дж.Н., Вулпау Дж.Р. Клинические применения интерфейсов мозг-компьютер: текущее состояние и перспективы на будущее. IEEE Rev Biomed Eng. 2009;2:187–199. [Бесплатная статья PMC] [PubMed] [Google Scholar]
2009;2:187–199. [Бесплатная статья PMC] [PubMed] [Google Scholar]
22. Wolpaw J.R., Birbaumer N., McFarland D.J., Pfurtscheller G., Vaughan T.M. Интерфейсы мозг-компьютер для связи и управления. Клин Нейрофизиол. 2002;113(6):767–791. [PubMed] [Google Scholar]
23. McFarland D.J., Krusienski D.J., Sarnacki W.A., Wolpaw J.R. Эмуляция управления компьютерной мышью с помощью неинвазивного интерфейса мозг-компьютер. Дж. Нейронная инженерия. 2008;5(2):101–110. [Бесплатная статья PMC] [PubMed] [Google Scholar]
24. Каягил Т. А., Бай О., Энрикес К. С. Бинарный метод простого и точного двумерного управления курсором по ЭЭГ с минимальной подготовкой испытуемого. J Neuroeng Rehabil. 2009; 6 (6 мая): 14. [Бесплатная статья PMC] [PubMed] [Google Scholar]
25. McFarland D.J., Sarnacki W.A., Wolpaw J.R. Электроэнцефалографический (ЭЭГ) контроль трехмерного движения. Дж. Нейронная инженерия. 2010;7(3):036007. [Бесплатная статья PMC] [PubMed] [Google Scholar]
26. Доуд А.Дж., Лукас Дж.П., Писанский М.Т., Хе Б. Непрерывное трехмерное управление виртуальным вертолетом с использованием интерфейса мозг-компьютер, основанного на воображении движения. ПЛОС Один. 2011;6(10):e26322. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Доуд А.Дж., Лукас Дж.П., Писанский М.Т., Хе Б. Непрерывное трехмерное управление виртуальным вертолетом с использованием интерфейса мозг-компьютер, основанного на воображении движения. ПЛОС Один. 2011;6(10):e26322. [Бесплатная статья PMC] [PubMed] [Google Scholar]
27. Neuper C., Muller-Putz G.R., Scherer R., Pfurtscheller G. Воображение движений и контроль правописания и нейропротезов на основе ЭЭГ. Прог Мозг Res. 2006; 159: 393–409. [PubMed] [Google Scholar]
28. Cincotti F., Mattia D., Aloise F. Неинвазивная система интерфейса мозг-компьютер: на пути к ее применению в качестве вспомогательной технологии. Мозг Рес Бык. 2008;75(6):796–803. [Бесплатная статья PMC] [PubMed] [Google Scholar]
29. Pfurtscheller G., Guger C., Muller G., Krausz G., Neuper C. Мозговые колебания контролируют ортез руки при тетраплегии. Нейроски Летт. 2000;292(3):211–214. [PubMed] [Google Scholar]
30. Пфуртшеллер Г., Мюллер Г.Р., Пфуртшеллер Дж., Гернер Х.Дж., Рупп Р. «Мыслительный» контроль функциональной электрической стимуляции для восстановления захвата руки у пациента с тетраплегией. Нейроски Летт. 2003;351(1):33–36. [PubMed] [Google Scholar]
Нейроски Летт. 2003;351(1):33–36. [PubMed] [Google Scholar]
31. McFarland D.J., Wolpaw J.R. Взаимодействие мозг-компьютер роботизированных и протезных устройств. Компьютер. 2010;41:52–56. [Google Scholar]
32. Muller-Putz G.R., Scherer R., Pfurtscheller G., Rupp R. Управление нейропротезом на основе ЭЭГ: шаг к клинической практике. Нейроски Летт. 2005;382(1-2):169–174. [PubMed] [Google Scholar]
33. Галан Ф., Наттин М., Лью Э. Кресло-коляска с приводом от мозга: асинхронные и неинвазивные интерфейсы мозг-компьютер для непрерывного управления роботами. Клин Нейрофизиол. 2008;119(9):2159–2169. [PubMed] [Google Scholar]
34. Танака К., Мацунага К., Ван Х.О. Управление электрической инвалидной коляской на основе электроэнцефалограммы. IEEE Trans Robotics. 2005; 21: 762–766. [Google Scholar]
35. Hoffmann U., Vesin J.M., Ebrahimi T., Diserens K. Эффективный интерфейс мозг-компьютер на базе P300 для людей с ограниченными возможностями. J Neurosci Методы. 2008;167(1):115–125. [PubMed] [Академия Google]
2008;167(1):115–125. [PubMed] [Академия Google]
36. Krusienski D.J., Sellers E.W., McFarland D.J., Vaughan TM, Wolpaw J.R. На пути к повышению производительности правописания P300. J Neurosci Методы. 2008;167(1):15–21. [Бесплатная статья PMC] [PubMed] [Google Scholar]
37. Nijboer F., Sellers E.W., Mellinger J. Интерфейс мозг-компьютер на основе P300 для людей с боковым амиотрофическим склерозом. Клин Нейрофизиол. 2008; 119(8):1909–1916. [Бесплатная статья PMC] [PubMed] [Google Scholar]
38. Piccione F., Giorgi F., Tonin P. Интерфейс мозг-компьютер на основе P300: надежность и производительность у здоровых и парализованных участников. Клин Нейрофизиол. 2006;117(3):531–537. [PubMed] [Академия Google]
39. Селлерс Э.В., Дончин Э. Интерфейс мозг-компьютер на основе P300: первоначальные тесты на пациентах с БАС. Клин Нейрофизиол. 2006;117(3):538–548. [PubMed] [Google Scholar]
40. Селлерс Э.В., Кублер А., Дончин Э. Исследование интерфейса мозг-компьютер в Лаборатории когнитивной психофизиологии Университета Южной Флориды: P300 Speller. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):221–224. [PubMed] [Google Scholar]
IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):221–224. [PubMed] [Google Scholar]
41. Sellers E.W., Vaughan TM, Wolpaw J.R. Интерфейс мозг-компьютер для длительного независимого домашнего использования. Боковой амиотроф склеры. 2010;11(5):449–455. [PubMed] [Google Scholar]
42. Vaughan T.M., McFarland D.J., Schalk G. Программа исследований и разработок Wadsworth BCI: дома с BCI. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):229–233. [PubMed] [Google Scholar]
43. Мюглер Э.М., Руф К.А., Гальдер С., Бенш М., Кублер А. Разработка и реализация интерфейса мозг-компьютер на базе P300 для управления интернет-браузером. IEEE Trans Neural Syst Rehabil Eng. 2010;18(6):599–609. [PubMed] [Академия Google]
44. Pires G., Castelo-Branco M., Nunes U. BCI на основе Visual P300 для управления инвалидной коляской: байесовский подход. Conf Proc IEEE Eng Med Biol Soc. 2008; 2008: 658–661. [PubMed] [Google Scholar]
45. Ребсамен Б., Бурдет Э., Гуань С. Управление инвалидной коляской в помещении с помощью мысли. Интеллектуальные системы IEEE. 2007; 22:18–24. [Google Scholar]
Интеллектуальные системы IEEE. 2007; 22:18–24. [Google Scholar]
46. Ребсамен Б., Гуан С., Чжан Х. Инвалидная коляска, управляемая мозгом, для передвижения в знакомой среде. IEEE Trans Neural Syst Rehabil Eng. 2010;18(6):590–598. [PubMed] [Google Scholar]
47. Ванакер Г., дель Р. Миллан Дж., Лью Э. Фильтрация на основе контекста для вождения в инвалидной коляске с помощью мозга. Компьютер Intel Neurosci. 2007:25130. [Бесплатная статья PMC] [PubMed] [Google Scholar]
48. Эллисон Б.З., Макфарланд Д.Дж., Шалк Г., Чжэн С.Д., Джексон М.М., Вулпоу Дж.Р. На пути к независимому интерфейсу мозг-компьютер с использованием устойчивых визуальных вызванных потенциалов. Клин Нейрофизиол. 2008;119(2):399–408. [Бесплатная статья PMC] [PubMed] [Google Scholar]
49. Келли С.П., Лалор Э.К., Финукейн С., МакДарби Г., Рейли Р.Б. Визуальный контроль пространственного внимания в независимом интерфейсе мозг-компьютер. IEEE Trans Biomed Eng. 2005;52(9):1588–1596. [PubMed] [Google Scholar]
50. Келли С.П., Лалор Э.К., Рейли Р.Б., Фокс Дж.Дж. Визуальное пространственное отслеживание внимания с использованием данных SSVEP высокой плотности для независимой связи между мозгом и компьютером. IEEE Trans Neural Syst Rehabil Eng. 2005;13(2):172–178. [PubMed] [Google Scholar]
Келли С.П., Лалор Э.К., Рейли Р.Б., Фокс Дж.Дж. Визуальное пространственное отслеживание внимания с использованием данных SSVEP высокой плотности для независимой связи между мозгом и компьютером. IEEE Trans Neural Syst Rehabil Eng. 2005;13(2):172–178. [PubMed] [Google Scholar]
51. Саттер Э. Э. Интерфейс реакции мозга: общение через визуально индуцированные электрические реакции мозга. J Микрокомпьютерные приложения. 1992;15:31–45. [Google Scholar]
52. Трехо Л.Дж., Росипал Р., Мэтьюз Б. Интерфейсы мозг-компьютер для одномерного и двумерного управления курсором: конструкции с использованием произвольного управления спектром ЭЭГ или стационарных зрительных вызванных потенциалов. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):225–229. [PubMed] [Google Scholar]
53. Muller-Putz G.R., Pfurtscheller G. Управление электрическим протезом с помощью BCI на основе SSVEP. IEEE Trans Biomed Eng. 2008;55(1):361–364. [PubMed] [Академия Google]
54. Голли Х., Волосяк И. , Маклахлан А.Дж., Хант К.Дж., Гразер А. Интерфейс мозг-компьютер на основе SSVEP для управления функциональной электрической стимуляцией. IEEE Trans Biomed Eng. 2010;57(8):1847–1855. [PubMed] [Google Scholar]
, Маклахлан А.Дж., Хант К.Дж., Гразер А. Интерфейс мозг-компьютер на основе SSVEP для управления функциональной электрической стимуляцией. IEEE Trans Biomed Eng. 2010;57(8):1847–1855. [PubMed] [Google Scholar]
55. Миддендорф М., Макмиллан Г., Калхун Г., Джонс К.С. Интерфейсы мозг-компьютер, основанные на стационарной зрительно-вызванной реакции. IEEE Trans Rehabil Eng. 2000;8(2):211–214. [PubMed] [Google Scholar]
56. Cecotti H. Самостоятельный и не требующий калибровки инструмент для написания интерфейса мозг-компьютер на основе SSVEP. IEEE Trans Neural Syst Rehabil Eng. 2010;18(2):127–133. [PubMed] [Академия Google]
57. Гао С., Сюй Д., Ченг М., Гао С. Контроллер окружающей среды на основе BCI для людей с ограниченными возможностями движения. IEEE Trans Neural Syst Rehabil Eng. 2003;11(2):137–140. [PubMed] [Google Scholar]
58. Furdea A., Halder S., Krusienski D.J. Слуховая чудаковатая система правописания (P300) для интерфейсов мозг-компьютер. Психофизиология. 2009;46(3):617–625. [PubMed] [Google Scholar]
2009;46(3):617–625. [PubMed] [Google Scholar]
59. Хинтербергер Т., Нойманн Н., Фам М. Мультимодальная система обратной связи и коммуникации на основе мозга. Опыт Мозг Res. 2004;154(4):521–526. [PubMed] [Академия Google]
60. Кублер А., Фурдеа А., Гальдер С., Хаммер Э.М., Нижбор Ф., Кочубей Б. Интерфейс мозг-компьютер, контролируемый слуховым потенциалом, связанным с событиями (p300), для запертых пациентов. Энн Н.Ю. Академия наук. 2009;1157:90–100. [PubMed] [Google Scholar]
61. Шредер М., Бланкерц Б., Тангерманн М. Новая парадигма слухового мультиклассового интерфейса мозг-компьютер: пространственный слух как информационный сигнал. ПЛОС Один. 2010;5(4):e9813. [Бесплатная статья PMC] [PubMed] [Google Scholar]
62. Брауэр А. М., Эрп Дж. Б. Тактильный интерфейс мозг-компьютер P300. Фронтальные нейроски. 2010;4:19. [Бесплатная статья PMC] [PubMed] [Google Scholar]
63. Чаттерджи А., Аггарвал В., Рамос А., Ачарья С., Такор Н.В. Интерфейс мозг-компьютер с вибротактильной биологической обратной связью для тактильной информации. J Neuroeng Rehabil. 2007; 4:40. [Бесплатная статья PMC] [PubMed] [Google Scholar]
J Neuroeng Rehabil. 2007; 4:40. [Бесплатная статья PMC] [PubMed] [Google Scholar]
64. Cincotti F., Kauhanen L., Aloise F. Вибротактильная обратная связь для работы интерфейса мозг-компьютер. Компьютер Intel Neurosci. 2007:48937. [Бесплатная статья PMC] [PubMed] [Google Scholar]
65. Muller-Putz G.R., Scherer R., Neuper C., Pfurtscheller G. Устойчивые соматосенсорные вызванные потенциалы: подходящие сигналы мозга для интерфейсов мозг-компьютер? IEEE Trans Neural Syst Rehabil Eng. 2006;14(1):30–37. [PubMed] [Google Scholar]
66. Neuper C., Muller G.R., Kubler A., Birbaumer N., Pfurtscheller G. Клиническое применение интерфейса мозг-компьютер на основе ЭЭГ: тематическое исследование пациента с тяжелой двигательной нарушение. Клин Нейрофизиол. 2003;114(3):399–409. [PubMed] [Google Scholar]
67. Vaughan T.M., Sellers E.W., Wolpaw J.R. Клиническая оценка BCI. В: Wolpaw JR, Wolpaw EW, редакторы. Интерфейсы мозг-компьютер: принципы и практика. Издательство Оксфордского университета; New York, NY: 2012.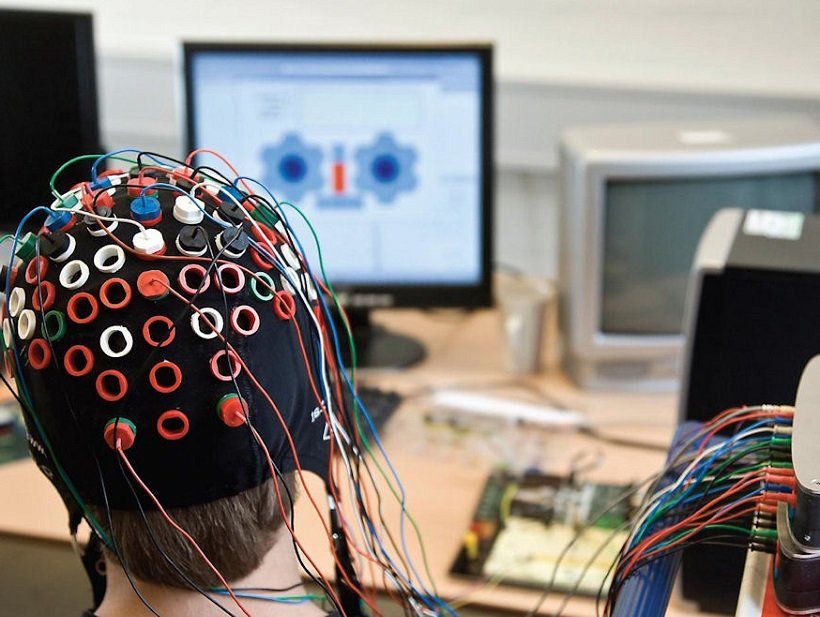 [Google Scholar]
[Google Scholar]
68. Daly J.J., Wolpaw J.R. Интерфейсы мозг-компьютер в неврологической реабилитации. Ланцет Нейрол. 2008;7(11):1032–1043. [PubMed] [Google Scholar]
69. Leuthardt E.C., Schalk G., Roland J., Rouse A., Moran D.W. Эволюция интерфейсов мозг-компьютер: выход за рамки классической двигательной физиологии. Нейрохирург Фокус. 2009 г.;27(1):Е4. [Бесплатная статья PMC] [PubMed] [Google Scholar]
70. Murase N., Duque J., Mazzocchio R., Cohen L.G. Влияние межполушарных взаимодействий на двигательную функцию при хроническом инсульте. Энн Нейрол. 2004;55(3):400–409. [PubMed] [Google Scholar]
71. Daly J.J., Fang Y., Perepezko E.M., Siemionow V., Yue G.H. Длительное время когнитивного планирования, повышенные когнитивные усилия и связь с координацией и моторным контролем после инсульта. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):168–171. [PubMed] [Академия Google]
72. Enzinger C., Ropele S., Fazekas F. Функция двигательной системы головного мозга у пациента с полной травмой спинного мозга после интенсивной тренировки интерфейса мозг-компьютер. Опыт Мозг Res. 2008;190(2):215–223. [PubMed] [Google Scholar]
Опыт Мозг Res. 2008;190(2):215–223. [PubMed] [Google Scholar]
73. Daly J.J., Cheng R.C., Hrovat K., Litinas K.H., Rogers J.M., Dohring M.E. Инсульт. Протокол 13-го Международного общества функциональной электростимуляции. 2008: 166–168. [Академия Google]
74. Hermes D., Miller K.J., Vansteensel M.J., Aarnoutse E.J., Leijten F.S., Ramsey N.F. Нейрофизиологические корреляты фМРТ в моторной коре человека. Hum Brain Map. 2011 [Бесплатная статья PMC] [PubMed] [Google Scholar]
75. Лашо Дж. П., Фонлупт П., Кахане П. Связь между гамма-колебаниями, связанными с задачей, и ЖИРНЫМ сигналом: новые данные комбинированной фМРТ и внутричерепной ЭЭГ. Hum Brain Map. 2007;28(12):1368–1375. [Бесплатная статья PMC] [PubMed] [Google Scholar]
76. Мэннинг Дж. Р., Джейкобс Дж., Фрид И., Кахана М. Дж. Широкополосные сдвиги в спектрах мощности потенциала локального поля коррелируют с импульсами одиночных нейронов у людей. Дж. Нейроски. 2009 г.;29(43):13613–13620. [Бесплатная статья PMC] [PubMed] [Google Scholar]
77. Миллер К.Дж. Широкополосное спектральное изменение: свидетельство макромасштабной корреляции скорости стрельбы населения? Дж. Нейроски. 2010;30(19):6477–6479. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Миллер К.Дж. Широкополосное спектральное изменение: свидетельство макромасштабной корреляции скорости стрельбы населения? Дж. Нейроски. 2010;30(19):6477–6479. [Бесплатная статья PMC] [PubMed] [Google Scholar]
78. Niessing J., Ebisch B., Schmidt K.E., Niessing M., Singer W., Galuske R.A. Гемодинамические сигналы тесно коррелируют с синхронизированными гамма-колебаниями. Наука. 2005;309(5736):948–951. [PubMed] [Академия Google]
79. Рэй С., Кроун Н.Е., Нибур Э., Франащук П.Дж., Сяо С.С. Нейронные корреляты высокогамма-колебаний (60-200 Гц) в потенциалах локального поля макака и их потенциальное значение в электрокортикографии. Дж. Нейроски. 2008;28(45):11526–11536. [Бесплатная статья PMC] [PubMed] [Google Scholar]
80. Ачарья С., Файфер М.С., Бенц Х.Л., Кроун Н.Е., Такор Н.В. Электрокортикографическая амплитуда предсказывает положение пальцев во время медленных хватательных движений руки. Дж. Нейронная инженерия. 2010;7(4):046002. [Бесплатная статья PMC] [PubMed] [Google Scholar]
81. Kubanek J., Miller K.J., Ojemann J.G., Wolpaw J.R., Schalk G. Расшифровка сгибания отдельных пальцев с использованием электрокортикографических сигналов у людей. Дж. Нейронная инженерия. 2009;6(6):066001. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Kubanek J., Miller K.J., Ojemann J.G., Wolpaw J.R., Schalk G. Расшифровка сгибания отдельных пальцев с использованием электрокортикографических сигналов у людей. Дж. Нейронная инженерия. 2009;6(6):066001. [Бесплатная статья PMC] [PubMed] [Google Scholar]
82. Миллер К.Дж., Занос С., Фетц Э.Э., дер Нийс М., Оджеманн Дж.Г. Разделение спектра мощности коры головного мозга позволяет в реальном времени отображать движения отдельных пальцев у людей. Дж. Нейроски. 2009;29(10):3132–3137. [Бесплатная статья PMC] [PubMed] [Google Scholar]
83. Шерер Р., Занос С.П., Миллер К.Дж., Рао Р.П., Оджеманн Дж.Г. Классификация контралатеральных и ипсилатеральных движений пальцев для электрокортикографических интерфейсов мозг-компьютер. Нейрохирург Фокус. 2009;27(1):E12. [PubMed] [Google Scholar]
84. Gunduz A., Sanchez J.C., Carney P.R., Principe J.C. Сопоставление широкополосных электрокортикографических записей с двумерными траекториями рук у людей: особенности управления двигателем. Нейронная сеть. 2009;22(9):1257–1270. [PubMed] [Академия Google]
Нейронная сеть. 2009;22(9):1257–1270. [PubMed] [Академия Google]
85. Шалк Г., Кубанек Дж., Миллер К.Дж. Расшифровка двумерных траекторий движения с помощью электрокортикографических сигналов у человека. Дж. Нейронная инженерия. 2007;4(3):264–275. [PubMed] [Google Scholar]
86. Pistohl T., Ball T., Schulze-Bonhage A., Aertsen A., Mehring C. Прогнозирование траекторий движения рук по ЭКоГ-записям у человека. J Neurosci Методы. 2008;167(1):105–114. [PubMed] [Google Scholar]
87. Фелтон Э.А., Уилсон Дж.А., Уильямс Дж.К., Гарелл П.К. Электрокортикографически контролируемые интерфейсы мозг-компьютер с использованием моторных и сенсорных образов у пациентов с временными имплантами субдуральных электродов: отчет о четырех случаях. Дж Нейрохирург. 2007;106(3):495–500. [PubMed] [Google Scholar]
88. Leuthardt E.C., Schalk G., Wolpaw J.R., Ojemann J.G., Moran D.W. Интерфейс мозг-компьютер с использованием электрокортикографических сигналов у людей. Дж. Нейронная инженерия. 2004;1(2):63–71. [PubMed] [Google Scholar]
2004;1(2):63–71. [PubMed] [Google Scholar]
89. Ramsey N.F., van de Heuvel M.P., Kho K.H., Leijten F.S. К приложениям BCI для человека, основанным на когнитивных системах мозга: исследование нейронных сигналов, записанных из дорсолатеральной префронтальной коры. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):214–217. [PubMed] [Академия Google]
90. Шалк Г., Миллер К.Дж., Андерсон Н.Р. Двумерное управление движением с помощью электрокортикографических сигналов у человека. Дж. Нейронная инженерия. 2008;5(1):75–84. [Бесплатная статья PMC] [PubMed] [Google Scholar]
91. Wilson J.A., Felton E.A., Garell PC, Schalk G., Williams JC Факторы ЭКоГ, лежащие в основе мультимодального управления интерфейсом мозг-компьютер. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):246–250. [PubMed] [Google Scholar]
92. Бруннер П., Ритаччо А.Л., Эмрих Дж.Ф., Бишоф Х., Шалк Г. Быстрая связь с матричным орфографом «P300» с использованием электрокортикографических сигналов (ЭКоГ) Front Neurosci. 2011;5:5. [Бесплатная статья PMC] [PubMed] [Google Scholar]
2011;5:5. [Бесплатная статья PMC] [PubMed] [Google Scholar]
93. Хинтербергер Т., Видман Г., Лал Т.Н. Произвольная регуляция мозга и связь с сигналами электрокортикограммы. Эпилепсия Поведение. 2008;13(2):300–306. [PubMed] [Google Scholar]
94. Янагисава Т., Хирата М., Сайто Ю. Управление протезом руки в режиме реального времени с использованием сигналов электрокортикографии человека. Дж Нейрохирург. 2011;114(6):1715–1722. [PubMed] [Google Scholar]
95. Leuthardt EC, Gaona C., Sharma M. Использование электрокортикографической речевой сети для управления интерфейсом мозг-компьютер у людей. Дж. Нейронная инженерия. 2011;8(3):036004. [Бесплатная статья PMC] [PubMed] [Google Scholar]
96. Канолти Т., Солтани М., Далал С.С. Пространственно-временная динамика обработки слов в мозгу человека. Фронтальные нейроски. 2007;1(1):185–196. [Бесплатная статья PMC] [PubMed] [Google Scholar]
97. Pei X., Leuthardt EC, Gaona CM, Brunner P., Wolpaw JR, Schalk G. Пространственно-временная динамика электрокортикографической высокой гамма-активности во время явного и скрытого повторения слов. Нейроизображение. 2011;54(4):2960–2972. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Нейроизображение. 2011;54(4):2960–2972. [Бесплатная статья PMC] [PubMed] [Google Scholar]
98. Leuthardt E.C., Miller KJ, Schalk G., Rao R.P., Ojemann J.G. Компьютерный интерфейс мозга на основе электрокортикографии — опыт Сиэтла. IEEE Trans Neural Syst Rehabil Eng. 2006;14(2):194–198. [PubMed] [Google Scholar]
99. Blakely T., Miller K.J., Zanos S.P., Rao R.P., Ojemann J.G. Надежный долгосрочный контроль электрокортикографического интерфейса мозг-компьютер с фиксированными параметрами. Нейрохирург Фокус. 2009;27(1):E13. [PubMed] [Google Scholar]
100. Миллер К.Дж., Шалк Г., Фетц Э.Э., Ден Нийс М., Ойеманн Дж.Г., Рао П. Корковая активность во время двигательного выполнения, двигательные образы и онлайн-обратная связь на основе изображений. Proc Natl Acad Sci U S A. 2010;107(9):4430–4435. [Бесплатная статья PMC] [PubMed] [Google Scholar]
101. Chao Z.C., Nagasaka Y., Fujii N. Долгосрочное асинхронное декодирование движений рук с использованием электрокортикографических сигналов у обезьян. Фронт Нейроинж. 2010;3:3. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Фронт Нейроинж. 2010;3:3. [Бесплатная статья PMC] [PubMed] [Google Scholar]
102. Schalk G. Может ли электрокортикография (ЭКоГ) поддерживать надежные и мощные интерфейсы мозг-компьютер? Фронт Нейроинж. 2010;3:9. [Бесплатная статья PMC] [PubMed] [Google Scholar]
103. Simeral J.D., Kim S.P., Black M.J., Donoghue J.P., Hochberg L.R. Нейронный контроль траектории курсора и щелчка человеком с тетраплегией через 1000 дней после имплантации внутрикортикальной матрицы микроэлектродов. Дж. Нейронная инженерия. 2011;8(2):025027. [Бесплатная статья PMC] [PubMed] [Google Scholar]
104. Полмейер Э.А., Оби Э.Р., Перро Э.Дж. На пути к восстановлению использования рук у парализованной обезьяны: контролируемая мозгом функциональная электрическая стимуляция мышц предплечья. ПЛОС Один. 2009;4(6):e5924. [Бесплатная статья PMC] [PubMed] [Google Scholar]
105. Кеннеди П.Р., Бакай Р.А., Мур М.М., Адамс К., Голдуэйт Дж. Прямое управление компьютером из центральной нервной системы человека. IEEE Trans Rehabil Eng. 2000;8(2):198–202. [PubMed] [Google Scholar]
IEEE Trans Rehabil Eng. 2000;8(2):198–202. [PubMed] [Google Scholar]
106. Kennedy P.R., Bakay R.A. Восстановление нейронной активности парализованного пациента с помощью прямой связи с мозгом. Нейроотчет. 1998;9(8):1707–1711. [PubMed] [Google Scholar]
107. Бартельс Дж., Андреасен Д., Эхирим П. Нейротрофический электрод: метод сборки и имплантации в двигательную речевую кору человека. J Neurosci Методы. 2008;174(2):168–176. [Бесплатная статья PMC] [PubMed] [Google Scholar]
108. Guenther F.H., Brumberg J.S., Wright E.J. Беспроводной интерфейс мозг-машина для синтеза речи в реальном времени. ПЛОС Один. 2009;4(12):e8218. [Бесплатная статья PMC] [PubMed] [Google Scholar]
109. Чапин Дж. К., Моксон К. А., Марковиц Р. С., Николелис М. А. Управление рукой робота в реальном времени с использованием одновременно записанных нейронов в моторной коре. Нат Нейроски. 1999;2:664–670. [PubMed] [Google Scholar]
110. Гангули К., Кармена Дж. М. Появление стабильной корковой карты для нейропротезного контроля. PLoS биол. 2009;7(7):e1000153. [Бесплатная статья PMC] [PubMed] [Google Scholar]
PLoS биол. 2009;7(7):e1000153. [Бесплатная статья PMC] [PubMed] [Google Scholar]
111. Musallam S., Corneil B.D., Greger B., Scherberger H., Andersen R.A. Когнитивные управляющие сигналы для нейропротезирования. Наука. 2004;305(5681):258–262. [PubMed] [Google Scholar]
112. Сантанам Г., Рю С.И., Ю Б.М., Афшар А., Шеной К.В. Высокопроизводительный интерфейс мозг-компьютер. Природа. 2006;442(7099): 195–198. [PubMed] [Google Scholar]
113. Тейлор Д.М., Тиллери С.И., Шварц А.Б. Прямой кортикальный контроль трехмерных нейропротезных устройств. Наука. 2002; 296 (5574): 1829–1832. [PubMed] [Google Scholar]
114. Веллисте М., Перел С., Сполдинг М.С., Уитфорд А.С., Шварц А.Б. Корковый контроль протеза руки для самостоятельного кормления. Природа. 2008;453(7198):1098–1101. [PubMed] [Google Scholar]
115. Веб-сайт OCZ Technology. http://gear.ocztechnology.com/products/description/OCZ_Neural_Impulse_Actuator/index.html По состоянию на 5 сентября 2011 г.
116. Веб-сайт Brainfingers. http://www.brainfingers.com/ По состоянию на 5 сентября 2011 г.
Веб-сайт Brainfingers. http://www.brainfingers.com/ По состоянию на 5 сентября 2011 г.
117. Веб-сайт Emotiv. http://www.emotiv.com/ По состоянию на 5 сентября 2011 г.
118. Веб-сайт NeuroSky, Inc. http://www.neurosky.com/ По состоянию на 5 сентября 2011 г.
119. Веб-сайт Mattel Mind Flex. http://shop.mattel.com/product/index.jsp?productId=11695206 По состоянию на 27 января 2012 г.
120. Веб-сайт Uncle Milton Force Trainer. http://unclemilton.com/star_wars_science/ По состоянию на 5 сентября 2011 г.
121. Веб-сайт BrainMaster Technologies, Inc. http://www.brainmaster.com/ По состоянию на 5 сентября 2011 г.
122. Веб-сайт с информацией об ЭЭГ. http://www.eeginfo.com/ По состоянию на 5 сентября 2011 г.
123. Международный веб-сайт EEG Spectrum. http://www.eegspectrum.com/ По состоянию на 5 сентября 2011 г.
124. Веб-сайт Interactive Productline Mindball. http://www.mindball.se/ По состоянию на 5 сентября 2011 г.
125. Веб-сайт Guger Technologies. http://www.gtec.at/ По состоянию на 5 сентября 2011 г.
Веб-сайт Guger Technologies. http://www.gtec.at/ По состоянию на 5 сентября 2011 г.
126. Уолпоу Дж. Р. Исследование интерфейса мозг-компьютер достигает зрелости: традиционные предположения соответствуют новым реалиям. Джей Мот Бехав. 2010;42(6):351–353. [PubMed] [Google Scholar]
Введение в интерфейс мозг-компьютер
Что такое определение
Интерфейсы мозг-компьютер (BCI) — это системы, обеспечивающие связь между мозгом и различными машинами.
Они работают в три основных этапа: собирают сигналы мозга, интерпретируют их и выводят команды на подключенную машину в соответствии с полученным сигналом мозга. BCI может применяться для решения различных задач, включая, помимо прочего, нейробиоуправление, восстановление двигательной функции у парализованных пациентов, обеспечение связи с запертыми пациентами и улучшение сенсорной обработки. BCI можно разделить на три категории в зависимости от метода, используемого для сбора сигналов мозга.
Какие бывают типы BCI
Существует множество различных методов измерения сигналов мозга.
Мы можем разделить их на неинвазивные, полуинвазивные и инвазивные.
| Неинвазивные | . | ||
| Полуинвазивный | Электроды размещаются на открытой поверхности головного мозга (ЭКоГ). | ||
| Инвазивный | Микроэлектроды помещаются непосредственно в кору головного мозга и измеряют активность отдельного нейрона. |
На следующем изображении показаны различные слои мозга и откуда берется сигнал.
Неинвазивный : сигнал ЭЭГ снимается с размещения электродов на коже головы, то есть на самой внешней части.
Полуинвазивная : сигнал ЭКоГ снимается с электродов, помещенных в твердую мозговую оболочку или в паутинную оболочку.
Инвазивный : Интрапаренхиматозный сигнал принимается непосредственно при имплантации электродов в кору.
Инвазивные
Инвазивные типы BCI имплантируются непосредственно в мозг во время нейрохирургии. Существует одноблочных BCI, которые обнаруживают сигнал из одной области клеток мозга, и многокомпонентных BCI, которые обнаруживают из нескольких областей. Электроды имеют разную длину, например, до 1,5 мм (Юта, Blackrock Microsystems) или 10 мм (ФМА, MicroProbes) в МЭБ (1) . Качество сигнала самое высокое, но у процедуры есть несколько проблем, например, риск образования рубцовой ткани. Тело реагирует на инородный предмет и формирует шрам вокруг электродов, что вызывает ухудшение сигнала. Поскольку нейрохирургия может быть рискованным и дорогостоящим процессом, целью инвазивного BCI в основном являются слепые и парализованные пациенты.
Полуинвазивный метод
ЭКоГ
При электрокортикографии электроды размещают на открытой поверхности головного мозга для измерения электрической активности коры головного мозга. Впервые он был использован в 1950-х годах в Монреальском неврологическом институте. Он называется полуинвазивным, но для имплантации электродов все же требуется трепанация черепа. По этой причине он используется только тогда, когда операция необходима по медицинским показаниям (например, при эпилепсии).
Он называется полуинвазивным, но для имплантации электродов все же требуется трепанация черепа. По этой причине он используется только тогда, когда операция необходима по медицинским показаниям (например, при эпилепсии).
Электроды могут быть размещены вне твердой мозговой оболочки (эпидурально) или под твердой мозговой оболочкой (субдурально). Ленточные или сетчатые электроды покрывают большую площадь коры (от 4 до 256 электродов) (2), что позволяет проводить широкий спектр когнитивных исследований.
На изображении: МРТ-реконструкция головного мозга пациента с наложенными электродами (красный: массив сетки; синий: массив полос) для точного сопоставления нейрофизиологической активности с нейроанатомическими структурами (изображение из: Yang et al., Neuroimage, 2012)
(3)
Положительными характеристиками ЭКоГ являются:
- высокое пространственное разрешение и точность сигнала
- устойчивость к шуму
- более низкий клинический риск и надежность в течение длительного периода записи[1]
- более высокая амплитуда
Пространственное разрешение
Преимущество ЭКоГ по сравнению с ЭЭГ заключается в том, что пространственное разрешение намного выше, поскольку сигналу не нужно проходить, чтобы достичь кожи головы. Пространственное разрешение на ЭКоГ составляет десятые доли миллиметра, а на ЭЭГ – сантиметры (4).
Пространственное разрешение на ЭКоГ составляет десятые доли миллиметра, а на ЭЭГ – сантиметры (4).
Что мы подразумеваем под пространственным разрешением? В качестве аналогии можно взять ясность изображения. Картинка с более высоким пространственным разрешением «четче»; другими словами, он выглядит более точным, потому что состоит из большего количества пикселей на дюйм, показывая больше деталей. Изображение с более низким пространственным разрешением кажется менее четким или более размытым, поскольку оно состоит из меньшего количества пикселей на дюйм. Лучшее пространственное разрешение позволяет нам с большей точностью понять, откуда исходит сигнал. В случае ЭЭГ, когда электрический сигнал проходит через череп, он ослабляется из-за низкой проводимости костей. —————————————————————————————————————
Устойчивость к шуму
На сигнал ЭКоГ не влияют шумы и артефакты, как, например, ЭМГ (электромиографическая, вызываемая движениями мышц) и ЭОГ (электроокулографическая, вызываемая движениями глаз)
Меньший клинический риск
массивы электродов не должны проникать в кору, что делает ее более безопасной, чем инвазивная запись (4)
Более высокая амплитуда
Записи ЭКоГ составляют 50–100 мкВ максимум по сравнению с 10–20 мкВ
При ИМК
Были проведены различные исследования по использованию ЭКоГ при ИМК, но все они ограничиваются случаями, когда для удаления эпилептического очага потребовалось хирургическое вмешательство.
Например, в одном исследовании (5) исследователь использовал ЭКоГ для управления компьютерным курсором в двух измерениях. Пяти пациентам при подготовке к операции по поводу эпилепсии была имплантирована субдуральная матрица электродов на 7-14 дней. После короткого обучения продолжительностью менее 30 минут пациенты смогли управлять курсором в двух измерениях со средним показателем успеха 53–73%.
Неинвазивный
В следующем разделе мы кратко рассмотрим основные неинвазивные методы. Существует несколько неинвазивных методов, используемых для исследования мозга, из которых наиболее часто используется ЭЭГ из-за стоимости и портативности оборудования.
- МЭГ магнитоэнцефалография
- ПЭТ позитронно-эмиссионная томография
- фМРТ функциональная магнитно-резонансная томография
- fNIRS ближняя инфракрасная спектроскопия
- ЭЭГ электроэнцефалография
На следующем изображении можно увидеть различные методы визуализации мозга, сравниваемые по пространственному и временному разрешению:
МЭГ
магнитоэнцефалография
Что это?
Из Википедии «это метод функциональной нейровизуализации для картирования активности мозга путем регистрации магнитных полей, создаваемых электрическими токами, происходящими в мозгу естественным образом, с использованием очень чувствительных магнитометров».
На фото: МЭГ-сканер с пациентом из Национального института психического здоровья (6)
Как это работает?
МЭГ измеряет магнитное поле, вызванное токами в мозге, и предлагает лучшее пространственное разрешение по сравнению с ЭЭГ (7). Почему? Потому что магнитные поля гораздо меньше, чем электрические, страдают от эффекта пространственного размытия черепа и внутримозговой жидкости (8). «МЭГ максимально чувствительна к тангенциальным источникам и имеет низкую чувствительность к радиальным источникам» «МЭГ лучше, чем ЭЭГ, обнаруживает высокочастотную активность (например, выше 60 Гц). Это связано с тем, что магнитные поля проходят через череп и скальп, тогда как электрические поля проходят через эти ткани, что снижает отношение сигнал/шум на более высоких частотах».
ПЭТ
Позитронно-эмиссионная томография
Что это такое? ПЭТ — это метод ядерной визуализации, используемый в медицине для наблюдения за различными процессами, такими как кровоток, обмен веществ, нейротрансмиттеры, происходящие в организме.
«На этом изображении показан снимок, сделанный в типичном ПЭТ-центре, оснащенном ПЭТ-сканером Exact HR+ ECAT. Подобные ПЭТ-сканеры неуклонно заменяются системами, которые объединяют ПЭТ- и КТ-сканеры в одном устройстве визуализации ПЭТ/КТ». (9)
Как это работает?
Небольшое количество радиоактивного материала, называемого радиоактивным индикатором, вводится в кровоток для достижения головного мозга. В случае головного мозга радиоактивный индикатор присоединяется к глюкозе и создает радионуклид, называемый фтордезоксиглюкозой (ФДГ) (10). Мозг использует глюкозу, и он будет показывать разные уровни в зависимости от уровня активности разных областей. Изображения ПЭТ-сканирования многоцветные, где области с большей активностью окрашены в более теплые цвета, такие как желтый и красный. ПЭТ-сканирование головного мозга часто используется для выявления таких заболеваний, как рак или другие.
ПЭТ нормального человеческого мозга
фМРТ
функциональная магнитно-резонансная томография
Что такое?
Функциональная магнитно-резонансная томография или функциональная МРТ (фМРТ) — это процедура функциональной нейровизуализации с использованием технологии МРТ, которая измеряет активность мозга путем обнаружения изменений, связанных с кровотоком. [1][2] Этот метод основан на том факте, что мозговой кровоток и активация нейронов взаимосвязаны. Когда область мозга используется, приток крови к этой области также увеличивается. (11)
[1][2] Этот метод основан на том факте, что мозговой кровоток и активация нейронов взаимосвязаны. Когда область мозга используется, приток крови к этой области также увеличивается. (11)
ФМРТ была разработана в 1990-х годах. Это неинвазивный и безопасный метод, в нем не используется радиация, он прост в использовании и имеет отличное пространственное и хорошее временное разрешение. (12)
Как это работает?
В головном мозге гемоглобин в капиллярных эритроцитах доставляет кислород к нейронам. Активность вызывает большую потребность в кислороде, что приводит к увеличению кровотока. Магнитные характеристики гемоглобина изменяются независимо от того, насыщен он кислородом или нет. Это отличие позволяет аппарату МРТ, представляющему собой цилиндрическую трубку с мощным электромагнитом, определять, какие области мозга активны в конкретный момент.
Изображения фМРТ из исследования, показывающие, что части мозга загораются при виде домов, а другие части — при виде лиц. Значения «r» представляют собой корреляции, причем более высокие положительные или отрицательные значения указывают на лучшее совпадение.
Значения «r» представляют собой корреляции, причем более высокие положительные или отрицательные значения указывают на лучшее совпадение.
fNIRS
спектроскопия в ближней инфракрасной области
Что такое?
Функциональная спектроскопия в ближней инфракрасной области (fNIR или fNIRS) — это использование NIRS (спектроскопии в ближней инфракрасной области) для функциональной нейровизуализации. Используя fNIR, активность мозга измеряется посредством гемодинамических реакций, связанных с поведением нейронов. (13)
Оптический метод измерения локальной активности коры головного мозга (14)
Как это работает?
fNIRS измеряет изменения кровотока так же, как фМРТ, но с использованием другого метода, инфракрасного света и магнитного поля.
На снимке: fNIRS во время эксперимента по настольному теннису (15)
В начале задания происходит потребление кислорода, по мере увеличения сложности возрастает и потребность в кислороде. фМРТ измеряет, сколько кислорода потребляется. fNIRS также измеряет, сколько кислорода доступно в этой области (перебор).
фМРТ измеряет, сколько кислорода потребляется. fNIRS также измеряет, сколько кислорода доступно в этой области (перебор).
Тем не менее временное качество fNIRS не так хорошо, как ЭЭГ. fNIRS берет 10 выборок в секунду, что превосходит ЭЭГ от 500 до 1000 выборок в секунду. Да и пространственное разрешение не такое хорошее, как у фМРТ. Например, фМРТ может отображать подкорковые области мозга, в то время как фНИРС не может анализировать дальше коры и не может зафиксировать какую-либо подкорковую активацию. Действительно, многие исследователи, представившие свои fNIRS на SfN, используют этот инструмент в качестве дополнения к своим данным ЭЭГ или фМРТ. (16)
Преимущества:
- Неинвазивный
- Портативный
- Доступный
- Менее чувствителен к артефактам по сравнению с фМРТ и ЭЭГ
Имеет временное разрешение, более похожее на ЭЭГ. второй. (17)
fNIRS лучшее пространственное разрешение, чем ЭЭГ, и лучшее временное разрешение, чем фМРТ
ЭЭГ
Определение
ЭЭГ обеспечивает регистрацию электрической активности головного мозга с поверхности скальпа.
Как это работает?
Электроды помещаются на кожу головы для улавливания электрического тока, генерируемого мозгом.
При возбуждении нейрон образует диполь с более низким напряжением в синапсах и более высоким напряжением в аксоне. Если это тормозной нейрон, диполь перевернут, с более низким напряжением в аксоне и более высоким напряжением в синапсах. Что вызывает этот сдвиг напряжения внутри нейрона? Каналы Na+ открываются вдоль дендрита, вызывая поток положительных электронов, этот положительный заряд перемещается вниз по аксону, открывая больше натриевых каналов и заставляя электрический заряд нести вниз по аксону, разряжаясь в синапсе, высвобождая вместе с ним нейротрансмиттеры. Когда группы нейронов срабатывают вместе, они обеспечивают достаточно сигнала, чтобы мы могли измерить его с кожи головы. Мы только способны измерять скопления нейронов с помощью ЭЭГ (размером примерно с четверть в диаметре).
Преимущества: портативный, помещается в небольшой чемодан (по сравнению с МЭГ, для которого требуются специальные помещения). Системы ЭЭГ лабораторного уровня могут быть дорогими, но они дешевле, чем другие методы BCI. В последние годы выпускается все больше коммерческих ЭЭГ-систем.
Системы ЭЭГ лабораторного уровня могут быть дорогими, но они дешевле, чем другие методы BCI. В последние годы выпускается все больше коммерческих ЭЭГ-систем.
Данные ЭЭГ содержат ритмическую активность, отражающую нервные колебания. Колебания описываются частотой, мощностью и фазой. Колебания происходят на определенных частотах (т. е. с определенной скоростью). К ним относятся дельта, тета, альфа, мета и гамма. Исследования обнаружили связь между этими ритмами и различными состояниями мозга. Например, коммерческие ЭЭГ-гарнитуры, часто используемые для таких целей, как медитация, обычно измеряют активность мозга, происходящую на альфа-частоте.
Пространственное разрешение
Пространственное разрешение ЭЭГ определяется количеством используемых электродов. В исследованиях, когда требуется более высокое пространственное разрешение, обычно используется не менее 32 электродов, вплоть до 256. В целом пространственное разрешение ЭЭГ низкое (например, по сравнению с ЭКоГ и фМРТ), поскольку сигнал должен проходить через разные слои вверх. к черепу. Однако разрешение можно улучшить, используя определенные типы фильтров или комбинируя ЭЭГ с другими инструментами (например, фМРТ). (изображение размещения электродов..)
к черепу. Однако разрешение можно улучшить, используя определенные типы фильтров или комбинируя ЭЭГ с другими инструментами (например, фМРТ). (изображение размещения электродов..)
Чем больше электродов, тем больше времени (например, установка), пропускной способности (для сбора и анализа данных) и денег (для материала). В коммерческих гарнитурах часто используется меньше электродов, потому что не обязательно требуется высокое пространственное разрешение (т. е. локализация точных областей мозга, генерирующих сигнал).
«Пространственная точность ЭЭГ довольно низкая, но может быть улучшена с помощью пространственных фильтров, таких как поверхностный лапласиан или адаптивные методы пространственно-изображения источника»
Также низкая пространственная точность, поскольку активность, регистрируемая электродом, смесь различных сигналов, генерируемых разными областями мозга, близкими и удаленными от того, который находится под электродом. Микроскопический масштаб (менее нескольких кубических миллиметров) = невидимый для ЭЭГ, потенциалы недостаточно сильны, чтобы достичь скальпа. Мезоскопический масштаб (участки коры от нескольких кубических миллиметров до нескольких кубических сантиметров) = может быть обнаружен с помощью ЭЭГ, но с использованием более 64 электродов и методов пространственной фильтрации. Макроскопический масштаб (большая область коры во много кубических сантиметров) = легко измеряется с помощью ЭЭГ
Мезоскопический масштаб (участки коры от нескольких кубических миллиметров до нескольких кубических сантиметров) = может быть обнаружен с помощью ЭЭГ, но с использованием более 64 электродов и методов пространственной фильтрации. Макроскопический масштаб (большая область коры во много кубических сантиметров) = легко измеряется с помощью ЭЭГ
Временное разрешение
Преимуществом ЭЭГ является отличное временное разрешение. За одну секунду можно сделать тысячи снимков электрической активности с разных датчиков. В ЭЭГ возможно использование нескольких электродов, до 500, исходя из эксперимента. Их устанавливают на шапочки, чтобы можно было собирать данные из одной и той же области головы.
Сравнение
BCI может использовать любой тип визуализации мозга. К ним относятся фМРТ, ПЭТ и NIRS, которые основаны на изменениях кровотока (то есть гемодинамическом ответе), а также МЭГ и ЭЭГ, которые измеряют магнитную и электрическую активность мозга соответственно. В то время как пространственное разрешение фМРТ и NIRS высокое, у них плохое временное разрешение; МЭГ и ПЭТ имеют высокое пространственное и временное разрешение; ЭЭГ имеет низкое пространственное, но высокое временное разрешение. В настоящее время фМРТ и МЭГ полагаются на дорогое и громоздкое оборудование; ПЭТ требует инъекции радиоактивного вещества в кровоток. Таким образом, чаще всего используются методы, основанные на БИКС и, в частности, на ЭЭГ.
В то время как пространственное разрешение фМРТ и NIRS высокое, у них плохое временное разрешение; МЭГ и ПЭТ имеют высокое пространственное и временное разрешение; ЭЭГ имеет низкое пространственное, но высокое временное разрешение. В настоящее время фМРТ и МЭГ полагаются на дорогое и громоздкое оборудование; ПЭТ требует инъекции радиоактивного вещества в кровоток. Таким образом, чаще всего используются методы, основанные на БИКС и, в частности, на ЭЭГ.
Компоненты
Мозговая деятельность
Нервная система состоит из двух основных частей: центральной нервной системы и периферической нервной системы. Мозг является основным органом центральной нервной системы и содержит около 100 миллиардов нейронов и триллионов клеток, называемых глией. Мозг состоит из трех основных частей: большого мозга (или коры), мозжечка (или малого мозга) и ствола мозга. (18)
Кора головного мозга (или головной мозг) разделена на четыре основных отдела, называемых долями: лобная доля, теменная доля, височная доля и затылочная доля.
(19)
Мозг постоянно генерирует электрические сигналы. Однако череп и кожа головы являются очень хорошими электрическими изоляторами, что затрудняет регистрацию отдельных нейронов. Но когда большое количество нейронов делает одно и то же одновременно, можно увидеть активность с помощью электродов, помещенных на поверхность кожи головы.
(20)
В человеческом мозгу каждый нерв связан примерно с 10 000 других нервов, в основном посредством дендритных связей. (21)
Когда нейроны общаются, возникают токи: электрический сигнал передается по аксону или дендриту. Электрический сигнал на конце аксона преобразуется в химический сигнал, и аксон высвобождает химические мессенджеры, называемые нейротрансмиттерами. Нейротрансмиттеры проходят через синапс к дендриту и преобразуются обратно в электрические сигналы.
Там, где ток уходит, есть положительная полярность, где ток входит, есть отрицательная полярность. Эти токи, называемые первичными токами, встраиваются в мозговую ткань и мозговую жидкость и достигают черепа и волосистой части головы. Разность потенциалов на коже головы может быть зафиксирована электродами ЭЭГ. Основными сигналами, генерируемыми на ЭЭГ, являются градиенты напряжения вдоль дендритов в верхних слоях коры. Чтобы иметь измеримый сигнал, тысячи параллельно ориентированных соседних дендритов должны быть активны синхронно. (22) Сигналы, которые можно измерить с помощью ЭЭГ:
Разность потенциалов на коже головы может быть зафиксирована электродами ЭЭГ. Основными сигналами, генерируемыми на ЭЭГ, являются градиенты напряжения вдоль дендритов в верхних слоях коры. Чтобы иметь измеримый сигнал, тысячи параллельно ориентированных соседних дендритов должны быть активны синхронно. (22) Сигналы, которые можно измерить с помощью ЭЭГ:
1) потенциалы действия вдоль аксонов, соединяющих нейроны
2) токи через синаптические щели, соединяющие аксоны с нейронами/дендритами
3) токи вдоль дендритов от синапсов к соме нейронов (23)
Получение сигнала
In в случае ЭЭГ-BCI электрический потенциал активности мозга измеряется с помощью электродов, помещенных на кожу головы. Электроды представляют собой металлические диски, размещенные на стержне в положениях, измеренных по международной системе 10/20.
Существует два основных типа электродов:
Мокрый — с использованием солевого раствора геля. Проводимость увеличивается, потому что электрическое расстояние сведено к минимуму. Большинство из них изготовлены из нержавеющей стали, олова, золота или серебра и покрыты покрытием из хлорида серебра.
Большинство из них изготовлены из нержавеющей стали, олова, золота или серебра и покрыты покрытием из хлорида серебра.
На изображении электроды ЭЭГ с золотым покрытием
Сухие — более удобны и просты в использовании, но могут терять высокие частоты Фото — подробнее
В помощь позиции, столько электродов требуется -> крышка
ЭЭГ надежна для приложений реального времени, поскольку она может проводить измерения каждые тысячные доли секунды. Проблема с ЭЭГ – это шум. Поскольку электроды размещены на коже головы, между ними есть слои, а также фоновый шум и мышцы.
КАК РАБОТАЕТ СЪЕМКА ЭЭГ?
ЭЭГ измеряет электрическую активность головного мозга. Записывается разница напряжений между минимум двумя электродами. ЭЭГ необходимо регистрировать одновременно с нескольких электродов, чтобы интерпретировать ERP. Во время синаптического возбуждения дендритов в нейронах генерируются электрические токи, которые регистрируются на ЭЭГ. Поскольку обнаруженный сигнал плохой, поскольку электроды находятся далеко от нейронов и сигнал проходит через кости и череп, для записи электрического потока требуется усилитель.
Поскольку обнаруженный сигнал плохой, поскольку электроды находятся далеко от нейронов и сигнал проходит через кости и череп, для записи электрического потока требуется усилитель.
Что нужно?
- Электроды — обычно из хлорида серебра
- Усилители
- Аналого-цифровые преобразователи
- Записывающее устройство
«Электроды получают сигнал от кожи головы, усилители обрабатывают аналоговый сигнал для увеличения амплитуды сигналов ЭЭГ, чтобы аналого-цифровой преобразователь мог более точно оцифровывать сигнал. Наконец, записывающее устройство, которым может быть персональный компьютер или подобное устройство, сохраняет и отображает данные». (24)
Электроды
Как сообщалось ранее, для ЭЭГ доступны различные типы электродов, такие как: одноразовые (сухие или влажные), многоразовые дисковые электроды (золотые, серебряные, из нержавеющей стали или олова), налобные повязки и колпачки для электродов (например, потребительские), электроды на физиологической основе, игольчатые электроды (25) . В 1958 г. была разработана стандартная система размещения электродов, при которой голова делится на пропорциональные расстояния (Jasper, 1958).
В 1958 г. была разработана стандартная система размещения электродов, при которой голова делится на пропорциональные расстояния (Jasper, 1958).
На изображении: расположение электродов системы регистрации ЭЭГ (электроэнцефалографии) International 10-20 (26)
Минимальная конфигурация состоит из трех электродов: активного электрода, электрода сравнения и заземляющего электрода. ЭЭГ измеряет разность потенциалов во времени между сигнальным или активным электродом и электродом сравнения. Очень трудно получить референс при отсутствии электрической активности мозга. Обычно он располагается на сосцевидном отростке, мочках ушей или кончике носа. Заземляющий электрод используется для измерения дифференциального напряжения между активной и контрольной точками.
Усилитель
Сигнал, принимаемый электродами, находится далеко и ослабляется различными слоями, через которые ему приходится проходить. По этой причине необходим усилитель, чтобы довести микровольты до диапазона, который можно оцифровать. Сигнал подается на усилитель по кабелю длиной 1-2 метра. К сожалению, кабели могут выступать в качестве антенны и принимать сигналы, которые будут мешать сигналу ЭЭГ и вызывать усиление шума. Некоторые «активные» электроды включают в себя небольшой предварительный усилитель внутри электрода, чтобы избежать шумовых помех. К сожалению, они довольно большие и дорогие и могут быть неуместны в некоторых ситуациях. (27)
Сигнал подается на усилитель по кабелю длиной 1-2 метра. К сожалению, кабели могут выступать в качестве антенны и принимать сигналы, которые будут мешать сигналу ЭЭГ и вызывать усиление шума. Некоторые «активные» электроды включают в себя небольшой предварительный усилитель внутри электрода, чтобы избежать шумовых помех. К сожалению, они довольно большие и дорогие и могут быть неуместны в некоторых ситуациях. (27)
Аналого-цифровые преобразователи
Аналого-цифровой преобразователь преобразует усиленный сигнал из аналоговой формы в цифровую. Полоса пропускания для сигналов ЭЭГ ограничена примерно 100 Гц, поэтому 200 Гц достаточно для дискретизации сигналов ЭЭГ.
Записывающее устройство
Это может быть компьютер или подобное устройство, которое будет записывать, хранить и отображать преобразованный сигнал.
Предварительная обработка
Необработанные данные ЭЭГ часто бывают нечеткими из-за шума и артефактов. Существует четыре основных источника шума и артефактов:
Существует четыре основных источника шума и артефактов:
- Аппаратура ЭЭГ
- Внешние электрические помехи по отношению к обследуемому и регистрирующей системе
- Отведения и электроды
- Обследуемый: электрическая активность сердца, моргание глаз, движения глазных яблок, движения мышц в целом. (29)
Мигание очень четкое на лобных и затылочных записях, а ЭКГ (от электрической активности сердца) на затылочных электродах. «Движение глазного яблока и век вызывает изменение потенциального поля из-за существующей разности потенциалов около 100 мВ между роговицей и сетчаткой» (30)
Этап предварительной обработки помогает очистить данные от шума и артефактов. Существуют разные методы и разные этапы предварительной обработки. Часто, например, к данным применяются фильтры. Для удаления постоянных составляющих сигнала и дрейфа используются фильтры верхних частот, где обычно достаточно частоты среза 1 Гц. Часто также могут применяться фильтры нижних частот для удаления высоких частот сигнала, потому что в ЭЭГ обычно не изучаются частоты выше 90 Гц. Другие методы используются для удаления артефактов, таких как движения глазных яблок или моргание.
Другие методы используются для удаления артефактов, таких как движения глазных яблок или моргание.
После различных этапов предварительной обработки, когда сигнал очищен от большинства артефактов и шумов, запись обрезается по эпохе в несколько секунд: это позволяет нам иметь большое количество признаков из одной записи ЭЭГ, и использовать их для статистики или применять классификаторы, как мы увидим в следующих разделах. (31)
Следующий шаг — извлечение признаков: анализ сигнала и извлечение информации. Поскольку сигнал ЭЭГ очень сложен, невозможно найти значимую информацию, просто глядя на него. Затем необходимо применить алгоритмы обработки, позволяющие найти контент (например, намерения человека), который будет скрыт невооруженным глазом. Существует множество методов выделения признаков, некоторые из них: мощности полос (BP) кросс-корреляция между мощностями полос ЭЭГ частотное представление (FR) частотно-временное представление (TFR) параметры Hjorth, обратная модель параметрического моделирования и специальные методы, используемые для P300 и VEP, такие как пиковый пик (PP) и расчет медленных корковых потенциалов (SCP) (32)
Классификация
Другим шагом, который можно применить к сигналу, в настоящее время в основном очищенному от артефактов, является применение алгоритмов классификации. С помощью методов машинного обучения можно научить классификатор распознавать, например, какие признаки принадлежат к тому или иному классу. Математика Опять же, классификация помогает выяснить, какую умственную задачу выполняет субъект (Очоа, 2002)
С помощью методов машинного обучения можно научить классификатор распознавать, например, какие признаки принадлежат к тому или иному классу. Математика Опять же, классификация помогает выяснить, какую умственную задачу выполняет субъект (Очоа, 2002)
Преобразование
После классификации сигнала результат передается алгоритму преобразования признаков. На этом этапе функции должны быть переведены в соответствующие требуемые действия. «Например, потенциал P3 может быть переведен в выбор буквы, которая его вызвала». Итак, в этом случае алгоритм отправит команду на устройство обратной связи, чтобы выбрать букву.
Устройство обратной связи
Устройство обратной связи получает команду на этапе преобразования. Например, это может быть компьютер, где сигнал будет использоваться для перемещения курсора, или это может быть роботизированная рука, в которой данные используются для движения.
Приложения
Примеры
Ограничения
Текущее состояние BCI требует преодоления многих ограничений:
Аппаратное/программное обеспечение Первая проблема связана с аппаратным обеспечением для сбора сигналов. Что касается ЭЭГ, датчики все еще имеют ограничения на сбор данных. Как мы видели, сигнал проходит большое расстояние до того, как его регистрирует ЭЭГ-аппарат, а шум и артефакты вызывают серьезные проблемы. ЭЭГ должна достигать хороших показателей во всех средах. Нужны надежные электроды. Технология должна быть надежной, несмотря на шум, создаваемый устройствами, поскольку многие НКИ предназначены для больных пациентов, которые часто окружены множеством электронного оборудования. (33)
Что касается ЭЭГ, датчики все еще имеют ограничения на сбор данных. Как мы видели, сигнал проходит большое расстояние до того, как его регистрирует ЭЭГ-аппарат, а шум и артефакты вызывают серьезные проблемы. ЭЭГ должна достигать хороших показателей во всех средах. Нужны надежные электроды. Технология должна быть надежной, несмотря на шум, создаваемый устройствами, поскольку многие НКИ предназначены для больных пациентов, которые часто окружены множеством электронного оборудования. (33)
Лучший сигнал, который мы видели, был получен с помощью инвазивных технологий. Но инвазивные BCI также имеют множество ограничений. Во-первых, их имплантируют лишь небольшому количеству пациентов, нуждающихся в хирургическом вмешательстве по другим причинам. Существуют этические проблемы, связанные с инвазивными технологиями (см. этический раздел?). Проблемы, которые необходимо преодолеть, сложны: система должна быть безопасной и оставаться неповрежденной, функциональной и надежной в течение десятилетий. Должна быть продемонстрирована безопасность в долгосрочной перспективе, поскольку имплантат потенциально может открыть путь инфекциям или отторгнуться организмом. Имплантат должен иметь прочные, комфортные, удобные и ненавязчивые внешние элементы; и легко взаимодействует с высокопроизводительными приложениями. И безопасно. (34) При использовании для изучения мозга инвазивные технологии могут не иметь лучших моделей, поскольку их имплантируют пациентам с проблемами или травмами, что не делает их идеальными кандидатами. Валидация и распространение BCI Надежность (35)
Должна быть продемонстрирована безопасность в долгосрочной перспективе, поскольку имплантат потенциально может открыть путь инфекциям или отторгнуться организмом. Имплантат должен иметь прочные, комфортные, удобные и ненавязчивые внешние элементы; и легко взаимодействует с высокопроизводительными приложениями. И безопасно. (34) При использовании для изучения мозга инвазивные технологии могут не иметь лучших моделей, поскольку их имплантируют пациентам с проблемами или травмами, что не делает их идеальными кандидатами. Валидация и распространение BCI Надежность (35)
Текущее понимание биологических сигналов и вариабельности
Проблема в том, что сигнал сложно расшифровать или для этого требуются месяцы обучения и у каждого человека он разный — не стандартный. Изменчивость характеристик сигнала вызывает необходимость в адаптивных алгоритмах BCI для правильной работы; Несмотря на известные основные правила выбора и настройки ИМК, до сих пор неясно, почему одни парадигмы или функции ИМК эффективны у одних пациентов, а другие нет. Исследования по так называемой «демографической оценке BCI», т.е. е. сколько людей и какие люди могут использовать тот или иной вид ИМК, было частично (в области стационарных зрительных вызванных потенциалов – ИМК на основе SSVEP) предоставлено Allison et al. (Эллисон и др., 2010) и Волосяк и др. (36)
Исследования по так называемой «демографической оценке BCI», т.е. е. сколько людей и какие люди могут использовать тот или иной вид ИМК, было частично (в области стационарных зрительных вызванных потенциалов – ИМК на основе SSVEP) предоставлено Allison et al. (Эллисон и др., 2010) и Волосяк и др. (36)
Этика
Новые технологии и нейрокомпьютерные интерфейсы вызывают множество этических проблем, которые решаются нейробиологическим сообществом. Проблемы затрагивают разные темы, такие как управление ожиданиями пациентов, концепция личной идентичности, действительность информированного согласия и так далее.
Информированное согласие Одним из важных этических вопросов, связанных с медицинским применением BCI, является получение информированного согласия от пациентов. Часто исследование BCI проводится с пациентами, страдающими изнурительными проблемами, такими как синдром запертости или инсульты различной степени тяжести. Важно понимать, является ли полученное согласие полностью информированным или затронутым инвалидностью.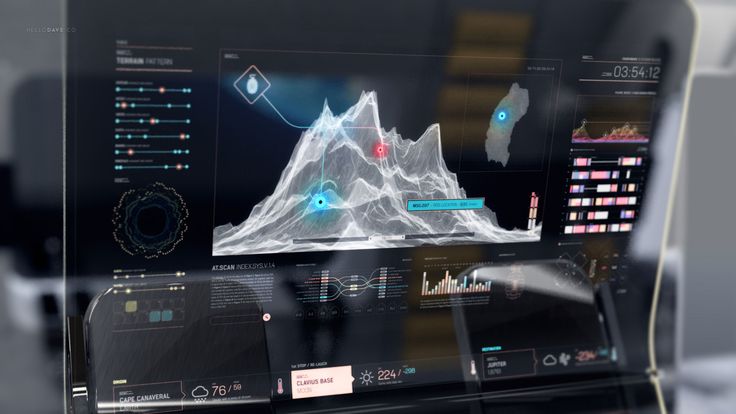
Определение ожиданий пациентов В. Глэннон рассказал о том, что у пациентов и их родственников могут быть ожидания в отношении технологий ИМТ, которые могут не оправдаться. Различные причины могут повлиять на способность или неспособность BCI работать, например, когнитивные способности или уровень инвалидности субъекта. Риск того, что технология не сработает, может причинить значительный дискомфорт пациентам, перевешивая возможные преимущества.
Риски и преимущества Некоторые конкретные технологии, такие как имплантируемые устройства, могут представлять риск для здоровья пациента. Это важная этическая проблема, которую необходимо решить.0003
Конфиденциальность Теория способности читать мысли оказала глубокое влияние на концепцию личной идентичности и конфиденциальности. Даже если технология еще далека от того, чтобы читать мысли человека, важно начать учитывать этические последствия. Если такая машина будет разработана, как будут передаваться и храниться данные? Как человек может сохранить полную собственность и избежать доступа хакеров или другого лица к «его мыслям»?
Правовые последствия Мозговой компьютерный интерфейс часто используется с парализованными людьми, чтобы помочь им восстановить движения с помощью протезов конечностей.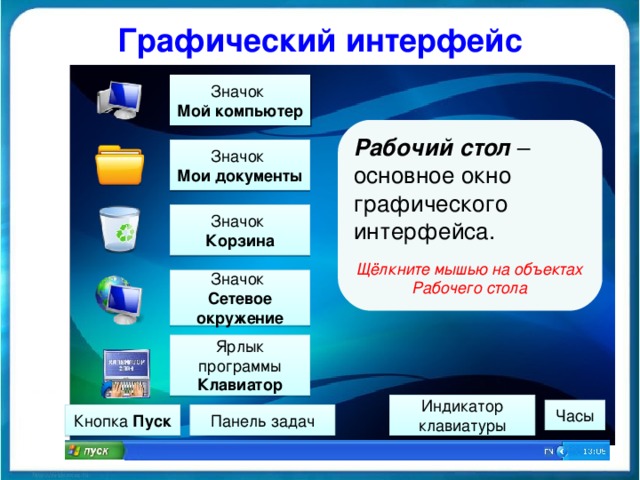 Некоторые исследователи задавались вопросом, кто будет нести ответственность в случае аварии с использованием таких методов. Как можно отличить произвольное действие от сбоя системы? Кроме того, возможность заставить общаться тяжелобольных пациентов может поставить вопрос о том, можно ли считать их ответы информированным согласием с учетом их статуса.
Некоторые исследователи задавались вопросом, кто будет нести ответственность в случае аварии с использованием таких методов. Как можно отличить произвольное действие от сбоя системы? Кроме того, возможность заставить общаться тяжелобольных пациентов может поставить вопрос о том, можно ли считать их ответы информированным согласием с учетом их статуса.
Влияние на общество Рассмотрение возможности BCI для повышения умственных способностей, объединение с Искусственным интеллектом (как например в плане Илона Маска). Мы задаемся вопросом, должны ли спортсмены с протезами конкурировать с другими, в то же время, если BCI улучшит когнитивные функции, у нас будет аналогичная проблема.
Безопасность
Будущее области
Нейроэлектрическая активность впервые была обнаружена Гансом Бергером в 1924 году и зарегистрирована на ЭЭГ. В 70-х годах Агентство перспективных исследований Министерства обороны США начало изучать мозговую коммуникацию с помощью ЭЭГ, а в 1976 Лаборатория компьютерных интерфейсов мозга Калифорнийского университета в Лос-Анджелесе представила доказательства того, что вызванные потенциалы можно использовать для управления курсором.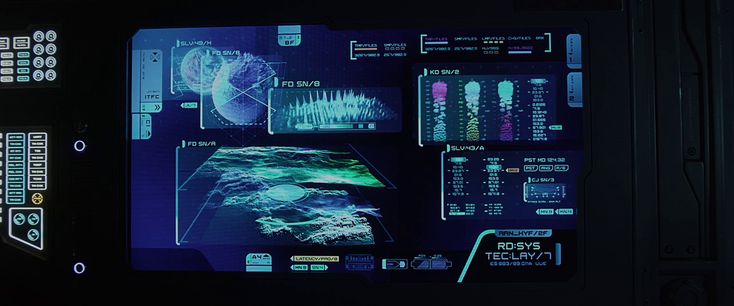 В том же году Жак Дж. Видаль создает термин BCI. За последние 50 лет эта область развивалась быстрыми темпами. Несколько важных вех:
В том же году Жак Дж. Видаль создает термин BCI. За последние 50 лет эта область развивалась быстрыми темпами. Несколько важных вех:
- 1998: Первый (инвазивный, не-ЭЭГ) имплант в человеческий мозг, который производит высококачественные сигналы управлять компьютерным курсором
- 2003: Первая игра BCI продемонстрирована публике (BrainGate)
- 2005: Мозг обезьяны управляет роботизированной рукой связь с мозгом, достигаемая путем передачи сигналов ЭЭГ через Интернет (37)
Эти достижения показывают, что НКИ является динамичной и растущей областью. Поскольку это междисциплинарная область, на эволюцию влияют различные факторы, такие как новое оборудование, новое машинное обучение / математические теории, достижения в области искусственного интеллекта и робототехники, новые открытия в медицине и неврологии и т. д. и т. д. В целом область BCI всегда была ограничивается академическим миром или медицинской сферой. Недавно к исследованию присоединились новые стартапы, стремящиеся расширить возможности человека: Facebook, Neuralink, Kernel.
В апреле 2017 года Facebook начал нанимать инженеров компьютерных интерфейсов мозга и инженеров нейровизуализации для работы над двухлетним проектом B8 с использованием машинного обучения и нейровизуализации. План состоит в том, чтобы использовать оптическую визуализацию для сканирования мозга, чтобы обнаруживать речь в голове и переводить ее в текст. Цель Facebook — позволить людям печатать со скоростью 100 слов в минуту, что быстрее, чем печатать на телефоне (и может позволить людям, которые не умеют печатать?). В хронике Цукеберга появился следующий пост:
В рамках этого проекта Facebook сотрудничает с Калифорнийским университетом в Сан-Франциско, Калифорнийским университетом в Беркли, Johns Hopkins Medicine, Лабораторией прикладной физики Университета Джона Хопкинса и Медицинской школой Вашингтонского университета в Сент-Луисе. Он создает аппаратное и программное обеспечение, имитирующее улитку в ухе, которая преобразует звук на определенных частотах для мозга. В проведенных тестах они смогли использовать словарный запас из 9 слов, чтобы пробить кожу.
В проведенных тестах они смогли использовать словарный запас из 9 слов, чтобы пробить кожу.
Нейралинк
Neuralink Илона Маска был публично запущен в марте 2017 года. Объявление было сделано на следующий день после того, как Facebook объявил о своем проекте BCI. Илон Маск несколько раз упоминал «нейронное кружево» — слой искусственного интеллекта, который расширил бы возможности человеческого мозга. В подробном отчете на сайте Стоп, но почему, они называют его «Шляпой волшебника». Это будет «третий слой», который дополнит два других: лимбическую систему и кору. Основная идея его создателя — создать имплантируемые устройства, которые помогут людям идти в ногу с развитием искусственного интеллекта. Вначале имплантаты можно было использовать для изучения мозга и для помощи в лечении таких заболеваний, как депрессия или эпилепсия. Имплантируемые электроды обеспечивают гораздо лучшее качество, чем ЭЭГ, но инвазивная технология вызывает много опасений. Имплантируемые устройства должны быть безопасными, в том числе в долгосрочной перспективе, биосовместимыми, иметь беспроводную форму связи, которая не будет ухудшаться со временем, необходимо решить проблему с питанием, и Маску нужно будет найти добровольцев для экспериментов. Также Маск говорит об «одном миллионе одновременно зарегистрированных нейронов», что является огромным числом по сравнению с примерно 200 электродами, размещенными в текущих экспериментах. В своем заявлении генеральный директор Neuralink сказал: «Я думаю, что до значимого частичного интерфейса мозга нам осталось примерно четыре или пять лет».
Также Маск говорит об «одном миллионе одновременно зарегистрированных нейронов», что является огромным числом по сравнению с примерно 200 электродами, размещенными в текущих экспериментах. В своем заявлении генеральный директор Neuralink сказал: «Я думаю, что до значимого частичного интерфейса мозга нам осталось примерно четыре или пять лет».
Ядро
Конечная цель Ядра также состоит в том, чтобы позволить людям сосуществовать и развиваться вместе с машинами. Его основатель Брайан Джонсон вложил 100 миллионов долларов в разработку мозговых имплантатов. В первую очередь основное внимание будет уделяться медицинским приложениям, пытающимся лучше понять мозг, чтобы в будущем двигаться к его увеличению, чтобы сделать человека умнее и здоровее. Kernel пообещал улучшить нейродегенеративные заболевания, что было большим заявлением, поскольку до сих пор мозговые имплантаты использовались только у людей с параличом нижних конечностей и для медицинских испытаний. (38) В настоящее время они разрабатывают аппаратное и программное обеспечение для лечения людей с болезнью Паркинсона, и в настоящее время в компании работает около 20 сотрудников.
(38) В настоящее время они разрабатывают аппаратное и программное обеспечение для лечения людей с болезнью Паркинсона, и в настоящее время в компании работает около 20 сотрудников.
Ссылки
Waldert, S. 2016. Инвазивные и неинвазивные нейронные сигналы для интерфейсов мозг-машина: какой из них преобладает? Доступно по адресу: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4921501/
Месгарани, Н.; Чанг, Э.Ф. 2012. Избирательная корковая репрезентация присутствующего говорящего при восприятии речи нескольких говорящих . Природа. 485 (7397): 233–6. дои: 10.1038/природа11020.
Сотрудники Blausen.com (2014). Медицинская галерея Blausen Medical 2014 . ВикиЖурнал медицины 1 (2). DOI: 10.15347/wjm/2014.010. ISSN 2002-4436. — Собственная работа
Leuthardt, E.C. et al. 2004. Интерфейс мозг-компьютер с использованием электрокортикографических сигналов у людей . Журнал нейронной инженерии, том 1, номер 2.
Доступно по адресу: http://iopscience.iop.org/article/10.1088/1741-2560/1/2/001/meta;jsessionid=E687A7B4A1215A8655C2DF6429F87A05.c2.iopscience.cld. iop.orgШалк, Г. и др. 2008. Двумерное управление движением с помощью электрокортикографических сигналов у людей. Journal of Neural Engineering, Volume 5, Number 1. Доступно по адресу: http://iopscience.iop.org/article/10.1088/1741-2560/5/1/008/meta
МЭГ-сканер с пациентом из National Институт психического здоровья. Неизвестный автор NIMH [общественное достояние], через Викисклад. Доступно по адресу: https://en.wikipedia.org/wiki/Magnetoencephalography#/media/File:NIMH_MEG.jpg
Питер Т. Лин, Картикея Шарма, Том Холройд, Харша Баттапади, Дин-Ю Фей и Оу Бай (2013). Высокопроизводительный BCI на основе MEG с использованием однократного пробного обнаружения намерения движения человека, функционального картирования мозга и попытки понять работающий мозг, доктор Франческо Синьорелли (ред.
), InTech, DOI: 10.5772/54550. Доступно по адресу: https://www.intechopen.com/books/functional-brain-mapping-and-the-endeavor-to-understand-the-working-brain/a-high-performance-meg-based-bci-using -однократное-обнаружение-намерения-движения-человекаНавин Лал, Томас и др. Интерфейс мозг-компьютер с онлайн-обратной связью на основе магнитоэнцефалографии. Доступно по адресу: http://www.machinelearning.org/proceedings/icml2005/papers/059_BrainComputer_LalEtAl.pdf
Автор Jens Maus (http://jens-maus.de/) — собственная работа, общественное достояние, https: //commons.wikimedia.org/w/index.php?curid=404712
Позитронно-эмиссионная томография (ПЭТ). Доступно по адресу: http://www.hopkinsmedicine.org/healthlibrary/test_procedures/neurological/positron_emission_tomography_pet_scan_92,p07654/
Википедия. Функциональная магнитно-резонансная томография. Доступно по адресу: https://en.wikipedia.org/wiki/Functional_ Magnetic_resonance_imaging.
Введение в FMRI. Доступно по адресу: https://www.ndcn.ox.ac.uk/divisions/fmrib/what-is-fmri/introduction-to-fmri
Википедия. Функциональная ближняя инфракрасная спектроскопия. Доступно по адресу: https://en.wikipedia.org/wiki/Functional_near-infrared_spectroscopy
Coyle, S., Ward, T.E., Markham, C. 2007. Интерфейс мозг-компьютер с использованием упрощенной функциональной системы спектроскопии в ближнем инфракрасном диапазоне. . Доступно по адресу: http://iopscience.iop.org/article/10.1088/1741-2560/4/3/007/pdf;jsessionid=7AEE10C6243EA9.643C6DECB3555DAA24.ip-10-40-1-105
fNIRS: Промежуточное значение для активности мозга в реальных условиях. Доступно по адресу: https://www.cogneurosociety.org/fnirs_wan/
fNIRS: промежуточный этап активности мозга в реальных условиях. Доступно по адресу: https://www.cogneurosociety.org/fnirs_wan/
Изображение доступно по адресу: http://3.
bp.blogspot.com/_TnLZz2ZDDxM/SsG-AuitJyI/AAAAAAAAAKA/BRZpWh4UrCc/s320/Brain_parts.gifВикипедия. Доли головного мозга. Доступно по адресу: https://en.wikipedia.org/wiki/Lobes_of_the_brain
Нейроны и глиальные клетки. Доступно по адресу: https://training.seer.cancer.gov/brain/tumors/anatomy/neurons.html
Sanei, S. (2013). Адаптивная обработка сигналов мозга. Сомерсет: John Wiley & Sons, Incorporated. Получено с 30 http://ebookcentral.proquest.com/lib/dcu/detail.action?docID=1207774
Введение в ЭЭГ и МЭГ. http://imaging.mrc-cbu.cam.ac.uk/meg/IntroEEGMEG#signalgeneration
Введение в ЭЭГ и МЭГ. http://imaging.mrc-cbu.cam.ac.uk/meg/IntroEEGMEG#signalgeneration
Николя-Алонсо, Л. Ф., и Гомес-Гил, Дж. (2012). Мозговые компьютерные интерфейсы, обзор. Sensors (Базель, Швейцария), 12(2), 1211–1279. http://doi.org/10.3390/s120201211
Саней, С. 2013. Адаптивная обработка сигналов мозга.
Джон Вили и сыновья, Инкорпорейтед.Викимедиа. https://commons.wikimedia.org/wiki/File:21_electrodes_of_International_10-20_system_for_EEG.svg
Таваколи П., Кэмпбелл К. Запись и количественная оценка связанных с событием потенциалов: I. Представление стимула и сбор данных.
 Доступно по адресу: http://iopscience.iop.org/article/10.1088/1741-2560/1/2/001/meta;jsessionid=E687A7B4A1215A8655C2DF6429F87A05.c2.iopscience.cld. iop.org
Доступно по адресу: http://iopscience.iop.org/article/10.1088/1741-2560/1/2/001/meta;jsessionid=E687A7B4A1215A8655C2DF6429F87A05.c2.iopscience.cld. iop.org ), InTech, DOI: 10.5772/54550. Доступно по адресу: https://www.intechopen.com/books/functional-brain-mapping-and-the-endeavor-to-understand-the-working-brain/a-high-performance-meg-based-bci-using -однократное-обнаружение-намерения-движения-человека
), InTech, DOI: 10.5772/54550. Доступно по адресу: https://www.intechopen.com/books/functional-brain-mapping-and-the-endeavor-to-understand-the-working-brain/a-high-performance-meg-based-bci-using -однократное-обнаружение-намерения-движения-человека
 bp.blogspot.com/_TnLZz2ZDDxM/SsG-AuitJyI/AAAAAAAAAKA/BRZpWh4UrCc/s320/Brain_parts.gif
bp.blogspot.com/_TnLZz2ZDDxM/SsG-AuitJyI/AAAAAAAAAKA/BRZpWh4UrCc/s320/Brain_parts.gif Джон Вили и сыновья, Инкорпорейтед.
Джон Вили и сыновья, Инкорпорейтед.28.
Очоа, Дж., 2002. Классификация сигналов ЭЭГ для приложений мозг-компьютерный интерфейс.
Очоа, Дж., 2002. Классификация сигналов ЭЭГ для приложений мозг-компьютерный интерфейс.
Риера, А. Обработка сигналов ЭЭГ для чайников. Доступно по адресу: http://neuroelectrics.hs-sites.com/blog/bid/245833/EEG-Signal-Processing-for-Dummies?utm_content=1049.8748&utm_medium=social&utm_source=googleplus
Тарик Ал-ани и Далила Трад (2010). Подходы к обработке сигналов и классификации для интерфейса мозг-компьютер, интеллектуальные и биосенсоры, Вернон С. Сомерсет (ред.), InTech, DOI: 10.5772/7032.