Создание Объёмных Изображений Лепкой, Резьбой
Решение этого кроссворда состоит из 8 букв длиной и начинается с буквы П
Ниже вы найдете правильный ответ на Создание объёмных изображений лепкой, резьбой, если вам нужна дополнительная помощь в завершении кроссворда, продолжайте навигацию и воспользуйтесь нашей функцией поиска.
ответ на кроссворд и сканворд
Воскресенье, 28 Февраля 2021 Г.
CodyCross Лондон Rруппа 490
ПЛАСТИКА
предыдущий следующий
ты знаешь ответ ?
ответ:
CODYCROSS Лондон Группа 490 ГОЛОВОЛОМКА 5
- Тысяча дорог с зеркальным отражением
- В ней красная шапочка несла пирожки бабушке
- Система монтессори или воскобовича для развития
- Одежда кавказского горца
- Матроскин считал, что они есть, а ума не хватает
- Раскладывать товар по отдельным коробкам
- Небольшой барабан с удлинённым корпусом
связанные кроссворды
- Пластика
- Полимерная глина для лепки
- Бытовое название эстетической операции
- Пластика
- В широком смысле — худож
- выразительность, гармония
- Выразительность объемной формы
- Пластика
- Изящество движений 8 букв
похожие кроссворды
- Искусство создания объемных или рельефных изображений (статуй 10 букв
- Создание изображений из кусочков материи, бумаги 10 букв
- Создание изображений ликов святых в православии
- Создание скульптурных изображений
- Искусство создания объемных художественных произведений путем резьбы 10 букв
- Тяжёлый транспорт для перевозки объёмных предметов
- Картина с использованием объёмных предметов
- Художник, занимающийся созданием объемных произведений букв
- Наука, изучающий методы измерения объемных форм по паре фотоснимков
Создание объемных объектов в Illustrator
- Руководство пользователя Illustrator
- Основы работы с Illustrator
- Введение в Illustrator
- Новые возможности в приложении Illustrator
- Часто задаваемые вопросы
- Системные требования Illustrator
- Illustrator для Apple Silicon
- Рабочая среда
- Основные сведения о рабочей среде
- Создание документов
- Панель инструментов
- Комбинации клавиш по умолчанию
- Настройка комбинаций клавиш
- Общие сведения о монтажных областях
- Управление монтажными областями
- Настройка рабочей среды
- Панель свойств
- Установка параметров
- Рабочая среда «Сенсорное управление»
- Поддержка Microsoft Surface Dial в Illustrator
- Восстановление, отмена, история и автоматизация
- Повернуть вид
- Линейки, сетки и направляющие
- Специальные возможности в Illustrator
- Безопасный режим
- Просмотр графических объектов
- Работа в Illustrator с использованием Touch Bar
- Файлы и шаблоны
- Инструменты в Illustrator
- Выделение инструменты
- Выделение
- Частичное выделение
- Групповое выделение
- Волшебная палочка
- Лассо
- Монтажная область
- Выделение
- Инструменты навигации
- Рука
- Повернуть вид
- Масштаб
- Инструменты рисования
- Градиент
- Сетка
- Создание фигур
- Градиент
- Текстовые инструменты
- Текст
- Текст по контуру
- Текст по вертикали
- Текст
- Инструменты рисования
- Перо
- Добавить опорную точку
- Удалить опорные точки
- Опорная точка
- Кривизна
- Отрезок линии
- Прямоугольник
- Прямоугольник со скругленными углами
- Эллипс
- Многоугольник
- Звезда
- Кисть
- Кисть-клякса
- Карандаш
- Формирователь
- Фрагмент
- Инструменты модификации
- Поворот
- Отражение
- Масштаб
- Искривление
- Ширина
- Свободное трансформирование
- Пипетка
- Смешать
- Ластик
- Ножницы
- Выделение инструменты
- Введение в Illustrator
- Illustrator на iPad
- Представляем Illustrator на iPad
- Обзор по Illustrator на iPad.

- Ответы на часто задаваемые вопросы по Illustrator на iPad
- Системные требования | Illustrator на iPad
- Что можно и нельзя делать в Illustrator на iPad
- Обзор по Illustrator на iPad.
- Рабочая среда
- Рабочая среда Illustrator на iPad
- Сенсорные ярлыки и жесты
- Комбинации клавиш для Illustrator на iPad
- Управление настройками приложения
- Документы
- Работа с документами в Illustrator на iPad
- Импорт документов Photoshop и Fresco
- Выбор и упорядочение объектов
- Создание повторяющихся объектов
- Объекты с переходами
- Рисование
- Создание и изменение контуров
- Рисование и редактирование фигур
- Текст
- Работа с текстом и шрифтами
- Создание текстовых надписей по контуру
- Добавление собственных шрифтов
- Работа с изображениями
- Векторизация растровых изображений
- Цвет
- Применение цветов и градиентов
- Представляем Illustrator на iPad
- Облачные документы
- Основы работы
- Работа с облачными документами Illustrator
- Общий доступ к облачным документам Illustrator и совместная работа над ними
- Обновление облачного хранилища для Adobe Illustrator
- Облачные документы в Illustrator | Часто задаваемые вопросы
- Устранение неполадок
- Устранение неполадок с созданием или сохранением облачных документов в Illustrator
- Устранение неполадок с облачными документами в Illustrator
- Основы работы
- Добавление и редактирование содержимого
- Рисование
- Основы рисования
- Редактирование контуров
- Рисование графического объекта с точностью на уровне пикселов
- Рисование с помощью инструментов «Перо», «Кривизна» и «Карандаш»
- Рисование простых линий и фигур
- Трассировка изображения
- Упрощение контура
- Определение сеток перспективы
- Инструменты для работы с символами и наборы символов
- Корректировка сегментов контура
- Создание цветка в пять простых шагов
- Рисование перспективы
- Символы
- Рисование контуров, выровненных по пикселам, при создании проектов для Интернета
- 3D-эффекты и материалы Adobe Substance
- Подробнее о 3D-эффектах в Illustrator
- Создание трехмерной графики
- Проецирование рисунка на трехмерные объекты
- Создание трехмерных объектов
- Создание трехмерного текста
- Подробнее о 3D-эффектах в Illustrator
- Цвет
- О цвете
- Выбор цветов
- Использование и создание цветовых образцов
- Коррекция цвета
- Панель «Темы Adobe Color»
- Цветовые группы (гармонии)
- Панель «Темы Color»
- Перекрашивание графического объекта
- Раскрашивание
- О раскрашивании
- Раскрашивание с помощью заливок и обводок
- Группы с быстрой заливкой
- Градиенты
- Кисти
- Прозрачность и режимы наложения
- Применение обводок к объектам
- Создание и редактирование узоров
- Сетки
- Узоры
- Выбор и упорядочение объектов
- Выделение объектов
- Слои
- Группировка и разбор объектов
- Перемещение, выравнивание и распределение объектов
- Размещение объектов
- Блокировка, скрытие и удаление объектов
- Создание дубликатов объектов
- Поворот и отражение объектов
- Перерисовка объектов
- Кадрирование изображений
- Трансформирование объектов
- Объединение объектов
- Вырезание, разделение и обрезка объектов
- Марионеточная деформация
- Масштабирование, наклон и искажение объектов
- Объекты с переходами
- Перерисовка с помощью оболочек
- Перерисовка объектов с эффектами
- Создание фигур с помощью инструментов «Мастер фигур» и «Создание фигур»
- Работа с динамическими углами
- Улучшенные процессы перерисовки с поддержкой сенсорного ввода
- Редактирование обтравочных масок
- Динамические фигуры
- Создание фигур с помощью инструмента «Создание фигур»
- Глобальное изменение
- Текст
- Дополнение текстовых и рабочих объектов типами объектов
- Создание маркированного и нумерованного списков
- Управление текстовой областью
- Шрифты и оформление
- Форматирование текста
- Импорт и экспорт текста
- Форматирование абзацев
- Специальные символы
- Создание текста по контуру
- Стили символов и абзацев
- Табуляция
- Текст и шрифты
- Поиск отсутствующих шрифтов (технологический процесс Typekit)
- Обновление текста из Illustrator 10
- Шрифт для арабского языка и иврита
- Шрифты | Часто задаваемые вопросы и советы по устранению проблем
- Создание эффекта 3D-текста
- Творческий подход к оформлению
- Масштабирование и поворот текста
- Интерлиньяж и межбуквенные интервалы
- Расстановка переносов и переходы на новую строку
- Усовершенствования работы с текстом
- Проверка орфографии и языковые словари
- Форматирование азиатских символов
- Компоновщики для азиатской письменности
- Создание текстовых проектов с переходами между объектами
- Создание текстового плаката с помощью трассировки изображения
- Создание специальных эффектов
- Работа с эффектами
- Стили графики
- Создание тени
- Атрибуты оформления
- Создание эскизов и мозаики
- Тени, свечения и растушевка
- Обзор эффектов
- Веб-графика
- Лучшие методы создания веб-графики
- Диаграммы
- SVG
- Создание анимации
- Фрагменты и карты изображений
- Рисование
- Импорт, экспорт и сохранение
- Импорт
- Импорт файлов графических объектов
- Импорт растровых изображений
- Импорт графического объекта из Photoshop
- Помещение нескольких файлов в документ
- Извлечение изображений
- Импорт файлов Adobe PDF
- Импорт файлов EPS, DCS и AutoCAD
- Сведения о связях
- Библиотеки Creative Cloud Libraries в Illustrator
- Библиотеки Creative Cloud Libraries в Illustrator
- Диалоговое окно «Сохранить»
- Сохранение иллюстраций
- Экспорт
- Использование графического объекта Illustrator в Photoshop
- Экспорт иллюстрации
- Сбор ресурсов и их массовый экспорт
- Упаковка файлов
- Создание файлов Adobe PDF
- Извлечение CSS | Illustrator CC
- Параметры Adobe PDF
- Информация о файле и метаданные
- Импорт
- Печать
- Подготовка к печати
- Настройка документов для печати
- Изменение размера и ориентации страницы
- Задание меток обреза для обрезки и выравнивания
- Начало работы с большим холстом
- Печать
- Наложение
- Печать с управлением цветами
- Печать PostScript
- Стили печати
- Метки и выпуск за обрез
- Печать и сохранение прозрачных графических объектов
- Треппинг
- Печать цветоделенных форм
- Печать градиентов, сеток и наложения цветов
- Наложение белого
- Подготовка к печати
- Автоматизация задач
- Объединение данных с помощью панели «Переменные»
- Автоматизация с использованием сценариев
- Автоматизация с использованием операций
- Устранение неполадок
- Проблемы с аварийным завершением работы
- Восстановление файлов после сбоя
- Проблемы с файлами
- Поддерживаемые форматы файлов
- Проблемы с драйвером ГП
- Проблемы устройств Wacom
- Проблемы с файлами DLL
- Проблемы с памятью
- Проблемы с файлом настроек
- Проблемы со шрифтами
- Проблемы с принтером
- Как поделиться отчетом о сбое с Adobe
Инструменты «3D» не зависят от инструментов «Сетка перспективы», и в перспективе объемные объекты рассматриваются как любые другие графические объекты.
Эффекты объема позволяют создавать трехмерные (объемные) объекты на двумерной (плоской) поверхности. Управлять оформлением объемных объектов можно с помощью освещения, теней, вращения и других свойств. Можно также помещать рисунки на каждой грани объемного объекта.
Существует два способа создания объемных объектов: вытягивание и вращение. Кроме того, можно вращать плоские или объемные объекты в трех измерениях. Чтобы применить или изменить 3D-эффекты для существующего трехмерного объекта, выберите объект и дважды щелкните эффект на панели Оформление.
Трехмерные объекты могут выводиться на экран с артефактами сглаживания, однако эти артефакты не выводятся на печать и отсутствуют на рисунках, оптимизированных для Интернета.
Обучающий видеоролик о работе с объемными объектами в Illustrator см. в разделе Добро пожаловать в 3D-мир.
Создание объемных объектов с помощью вытягивания
При вытягивании плоские объекты вытягиваются вдоль оси Z объекта, что добавляет объектам глубину. Например, при вытягивании плоский эллипс превращается в цилиндр.
Например, при вытягивании плоский эллипс превращается в цилиндр.
Ось объекта всегда перпендикулярна передней поверхности объекта и смещается относительно объекта, если он вращается в диалоговом окне «Параметры объемного изображения».
Экструзия объектаВыделите объект.
Нажмите Эффект > 3D (классика) > Вытягивание и фаска (классика).
Нажмите кнопку Больше, чтобы просмотреть полный список параметров, или Меньше, чтобы скрыть дополнительные параметры.
Выберите Предварительный просмотр, чтобы просмотреть эффект в окне документа.
Задайте следующие параметры:
Положение.
Выберите, как вращать объект и перспективу, с которой следует его рассматривать (см. Параметры положения объемного вращения).
Вытягивание и скос.
Определяет глубину объекта и границы добавляемого или отнимаемого скоса (см.
Вытягивание и скос).Поверхность.
Создает широкую гамму поверхностей, от тусклой и бестеневой матовой до блестящей и подсвеченной, которая выглядит как пластмасса (см. Параметры заливки поверхностей).
Освещение.
Добавьте один или несколько источников света, меняйте интенсивность освещения, цвет теней объекта и перемещайте источники света вокруг объекта для получения впечатляющего эффекта (см. Параметры освещения).
Отображение.
Помещает рисунки на поверхность объемных объектов (см. Отображение рисунка на объемный объект).
Нажмите кнопку ОК.
Вытянутый объект без скошенной границы (слева) и объект со скосом, направленным внутрь (в середине), и скосом, направленным наружу (справа)
 Вытягивание и скос).
Вытягивание и скос).Создание объемных объектов вращением
Вращение поворачивает контур или профиль вокруг глобальной оси y (оси вращения) для создания объемного объекта.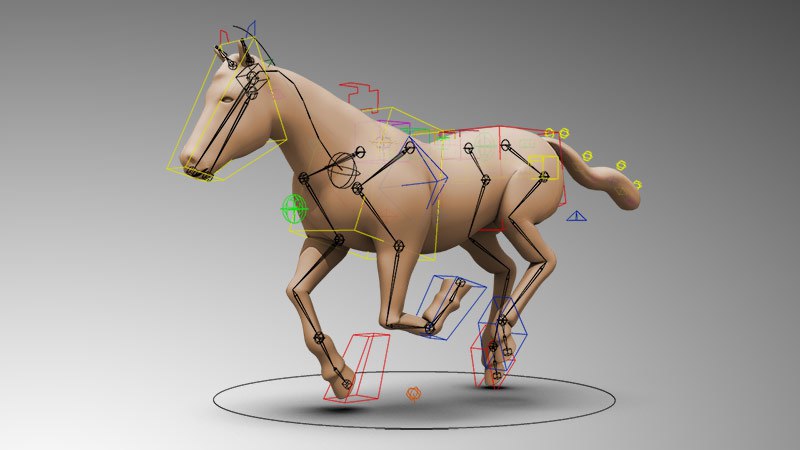 Поскольку ось вращения фиксирована вертикально, то обычно для изображения половины профиля необходимого объемного объекта в вертикальном и фронтальном положении используют открытый или замкнутый контур. Затем положение объемного объекта можно вращать в диалоговом окне эффектов.
Поскольку ось вращения фиксирована вертикально, то обычно для изображения половины профиля необходимого объемного объекта в вертикальном и фронтальном положении используют открытый или замкнутый контур. Затем положение объемного объекта можно вращать в диалоговом окне эффектов.
Выделите объект.
Примените эффект «Вращение объемного изображения» к одному или нескольким объектам, одновременно вращая каждый объект вокруг его оси. Каждый объект находится в своем собственном трехмерном пространстве и не пересекается с другими трехмерными объектами. С другой стороны, применение эффекта вращения к выбранной группе или слою приводит к вращению объектов вокруг одной оси.
Вращение контура с заливкой и без штриховки выполняется намного быстрее, чем вращение контура со штриховкой.
Нажмите Эффект > 3D (классика) > Поворот (классика).
Выберите Предварительный просмотр, чтобы просмотреть эффект в окне документа.
Нажмите кнопку Больше, чтобы просмотреть полный список параметров, или Меньше, чтобы скрыть дополнительные параметры.
Положение.
Выберите, как вращать объект и перспективу, с которой следует его рассматривать (см. Параметры положения объемного вращения).
Вращение.
Определяет, как вращать контур вокруг объекта, чтобы превратить его в трехмерный (см. Параметры вращения).
Поверхность.
Создает широкую гамму поверхностей, от тусклой и бестеневой матовой до блестящей и подсвеченной, которая выглядит как пластмасса (см. Параметры заливки поверхностей).
Освещение.
Добавьте один или несколько источников света, меняйте интенсивность освещения, цвет теней объекта и перемещайте источники света вокруг объекта для получения впечатляющего эффекта (см. Параметры освещения).
Отображение.
Помещает рисунки на поверхность объемных объектов (см. Отображение рисунка на объемный объект).
Нажмите кнопку ОК.

Параметры положения объемного вращения
Выполните любое из следующих действий:
Выберите текущее положение в меню Положение.
Для свободного вращения перетаскивайте грань кубика. Передней части объекта соответствует синяя грань кубика, верхняя и нижняя части объекта светло-серые, боковые стороны – серые, а задняя – темно-серая.
Чтобы ограничить поворот по глобальной оси, удерживайте клавишу Shift при перетаскивании по горизонтали (глобальная ось Y) или по вертикали (глобальная ось X). Для поворота объекта вокруг глобальной оси Z перетащите синюю ленту, которая окружает кубик.
Для сохранения вращения вокруг оси объекта перетащите ребро кубика.
Курсор будет иметь вид двойной стрелки , и ребро кубика изменит цвет в соответствии с осью, вокруг которой будет вращаться объект. Красное ребро соответствует оси X объекта, зеленое – оси Y, а синее – оси Z.Введите в текстовые поля значения от -180 до 180 для горизонтальной оси (X) , вертикальной оси (Y) и оси глубины (Z) .
Чтобы скорректировать перспективу, введите значение от 0 до 160 в текстовом поле Перспектива. Маленький угол аналогичен телеобъективу фотоаппарата, большой угол — широкоугольному объективу.
 Курсор будет иметь вид двойной стрелки , и ребро кубика изменит цвет в соответствии с осью, вокруг которой будет вращаться объект. Красное ребро соответствует оси X объекта, зеленое – оси Y, а синее – оси Z.
Курсор будет иметь вид двойной стрелки , и ребро кубика изменит цвет в соответствии с осью, вокруг которой будет вращаться объект. Красное ребро соответствует оси X объекта, зеленое – оси Y, а синее – оси Z.Угол линзы больше 150 может привести к выходу объекта за границы поля зрения и появлению искажений. Кроме того, следует помнить, что имеются оси X, Y и Z объекта и глобальные оси X, Y и Z. Оси объекта зависят от положения объекта в его трехмерном пространстве. Глобальные оси фиксированы относительно экрана компьютера. Ось X расположена горизонтально, ось Y вертикально, а ось Z перпендикулярна экрану.
Параметры вытягивания и скоса
Длина вытягивания.
Устанавливает глубину объекта, используются значения от 0 до 2000.
Концы.
Определяет, должен ли объект выглядеть сплошным (Отображать концы ) или пустотелым (Не отображать концы).
Скос.
Применяет выбранный тип скошенной грани вдоль оси глубины (оси Z) объекта.
Высота.
Устанавливает высоту от 1 до 100. Слишком большая высота скоса для объекта может вызвать самопересечение объекта и привести к непредсказуемым результатам.
Скос направлен наружу.
Добавляет скос к исходной фигуре объекта.
Скос направлен внутрь.
Вырезает скос из исходной фигуры объекта.
Параметры вращения
Угол.
Устанавливает число градусов для вращения контура от 0 до 360.
Концы.
Определяет, должен ли объект выглядеть сплошным (Отображать концы ) или пустотелым (Не отображать концы).
Отступы.
Добавляет расстояние между осью вращения и контуром, например, для создания кольцеобразных объектов. Можно указать значение от 0 до 1000.
От.
Задает оси, вокруг которых будет поворачиваться объект: По левому краю или По правому краю.
Параметры заливки поверхности
Поверхность.
Выберите вариант заливки поверхности:
Каркас
Выводятся контуры геометрии объекта, все поверхности прозрачны.
Без тени.
Объекту не добавляется новых свойств поверхности. Объемный объект имеет тот же цвет, что и исходный плоский объект.
Размытая тень.
Делает отраженный от объекта свет мягким и размытым.
Четкая тень.
Свет отражается от объекта так, словно он сделан из материала с высоким блеском.
Примечание. В зависимости от выбранного варианта доступны разные параметры освещения. Если объект использует только эффект объемного поворота, доступны только варианты поверхностей «Размытая тень» и «Без тени».
Интенсивность освещения.
Управляет интенсивностью света от 0 до 100%.
Окружающее освещение.
Управляет общим освещением, которое одинаково изменяет освещенность поверхности всех объектов. Введите значение от 0 до 100%.
Яркость подсветки.
Управляет отражением света от объектов, значения в диапазоне от 0 до 100%. Низкие значения создают матовую поверхность, более высокие образуют зеркальную поверхность.
Размер выделенной области.
Управляет размером подсветки от большого (100%) до малого (0%).
Шаги перехода.
Указывает, насколько плавно тени накладываются на поверхности объектов. Указывается значение от 1 до 256. Более высокое значение приводит к появлению более плавных переходов и большему количеству контуров, чем более низкое.
Прорисовать скрытые грани.
Выводит на экран скрытые грани объекта. Задняя сторона объекта видна, если он прозрачен или если объект был разобран и отодвинут в сторону.
Примечание: если объект содержит прозрачность и нужно, чтобы скрытые части с обратной стороны были видны через прозрачную переднюю сторону, примените команду Объект > Группировать, прежде чем применять 3D-эффект.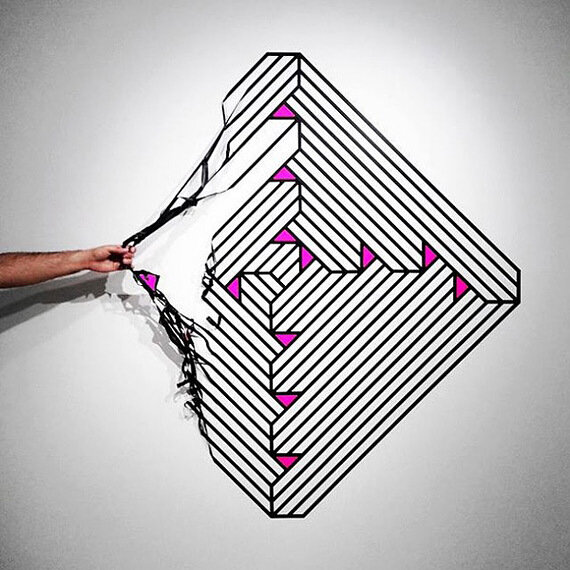
Сохранить плашечный цвет (эффект «Вытягивание и скос», «Вращение» и «Поворот»).
Позволяет сохранить плашечный цвет объекта. Плашечные цвета нельзя сохранять, если в качестве значения параметра Цвет затенения было выбрано «Заказной».
Примеры различной заливки поверхностиA. Каркас B. Без тени C. Размытая тень D. Четкая тень
Параметры освещения
Свет.
Определяет местоположение источника света Перетащите источник света по сфере в нужное место.
Кнопка «Переместить источник назад».
Перемещает выбранный источник света за объект.
Кнопка «Переместить источник вперед».
Перемещает выбранный источник света, устанавливая его перед объектом.
Кнопка «Новый источник света».
Добавляет источник света. По умолчанию новый источник света помещается спереди посреди сферы.
Кнопка «Удалить источник».
Удаляет выбранный источник света.
Примечание. По умолчанию объемные эффекты устанавливают один источник света на объект. Можно добавлять и удалять источники света, но объект должен иметь как минимум один источник света.
Интенсивность освещения.
Изменяет интенсивность выбранного источника света от 0 до 100%.
Цвет тени.
Управляет цветом тени объекта в зависимости от выбранной команды.
Нет.
Не добавляет цвета тени.
Заказной.
Позволяет задать заказной цвет. Если вы выбираете этот вариант, щелкните поле Цвет тени, чтобы выбрать цвет в Палитре цветов. Плашечные цвета изменятся в соответствии с обработкой цветов.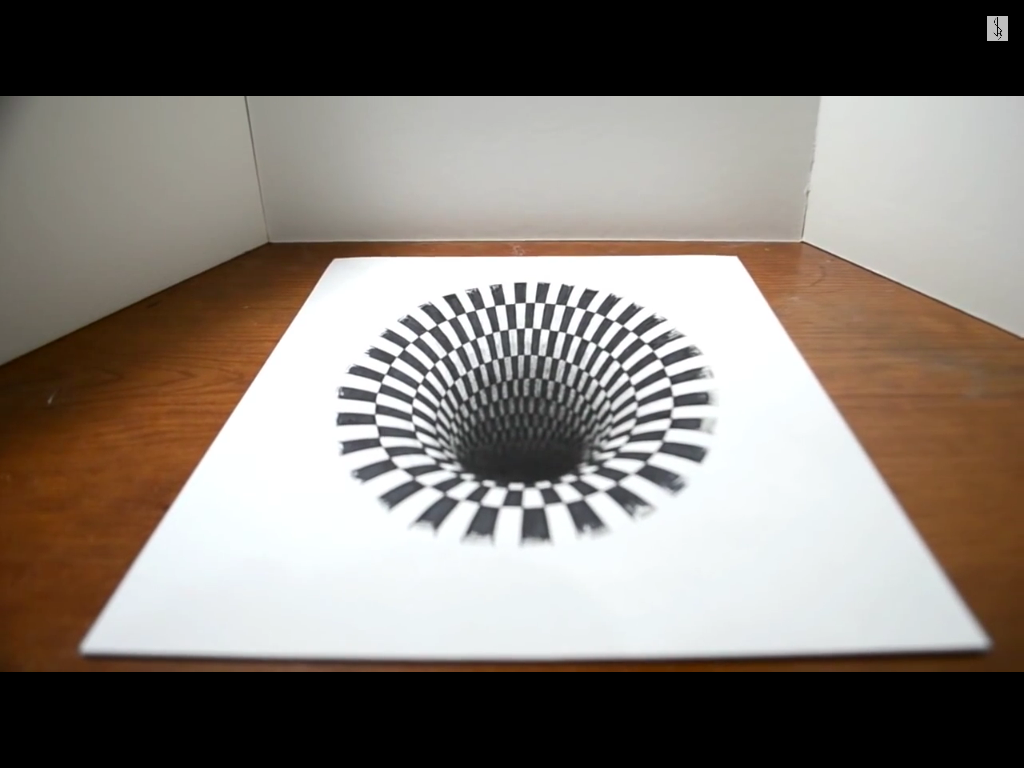
Наложение черного.
Предотвращает использование триадных цветов, если используется процесс с плашечными цветами. Тени объекта создаются путем наложения черного поверх цвета заливки объекта. Чтобы просмотреть затенение, выберите Вид > Просмотр наложения цветов.
Сохранять плашечные цвета.
Позволяет сохранить плашечный цвет объекта. Плашечные цвета нельзя сохранять, если в качестве значения параметра Цвет затенения было выбрано «Заказной».
Светящаяся сфераA. Выберите источник света спереди B. Кнопка перемещения выбранного источника назад или вперед C. Кнопка нового источника света D. Кнопка удаления источника света
Откройте файл Bevels.ai, который находится в папке Adobe Illustrator [версия]\Support Files\Required\Resources\ru_RU\ (Windows) или Adobe Illustrator [версия]\Required\Resources\ru_RU\ (Mac OS).
Создайте один разомкнутый контур в файле Bevels.ai.
Выберите Окно > Символы, затем выберите одно из приведенных ниже действий, чтобы превратить контур в символ.
Перетащите контур на панель Символы.
Выделите контур, нажмите кнопку Создать символ на панели Символы или выберите Создать символ в меню панели.
Чтобы переименовать символ, дважды щелкните его на панели Символы, введите название в диалоговом окне Параметры символа и нажмите кнопку OK.
Выберите Файл > Сохранить. Если функция Сохранить недоступна, выберите Файл > Сохранить как, чтобы сохранить файл в качестве локальной копии на своем компьютере. Переименуйте файл и переместите его обратно в исходное расположение: в папку Adobe Illustrator [версия]\Support Files\Required\Resources\ru_RU\ (Windows) или Adobe Illustrator [версия]\Required\Resources\ru_RU (Mac OS).
Исходный файл в первоначальном расположении будет заменен.Выйдите из Illustrator и перезапустите приложение.
В меню Фаска в диалоговом окне Параметры 3D-вытягивания и фаски приведена функция фаски.
Чтобы применить пользовательскую фаску, выполните одно из приведенных ниже действий.
Чтобы применить фаску к трехмерному объекту с втягиванием, выделите объект и дважды щелкните эффект 3D-вытягивание и фаска на панели Оформление. В диалоговом окне Параметры 3D-вытягивания и фаски выберите фаску в меню Фаска.
Чтобы применить пользовательскую фаску к 2D-изображению, выделите плоский объект, затем выберите Эффект > 3D > Вытягивание и фаска. В диалоговом окне Параметры 3D-вытягивания и фаски выберите пользовательскую фаску в меню Фаска.
 Исходный файл в первоначальном расположении будет заменен.
Исходный файл в первоначальном расположении будет заменен.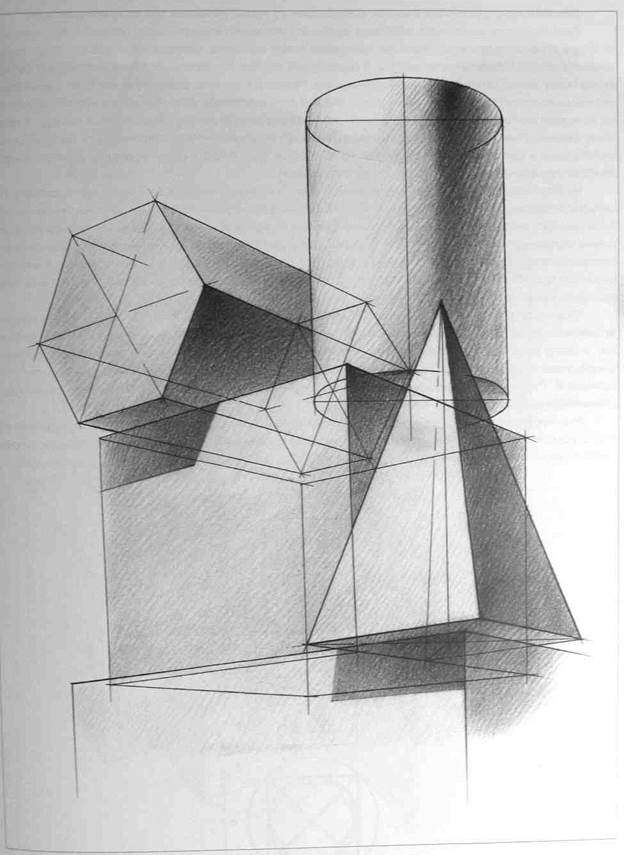
Выделите объект.
Выберите Эффект > 3D (классика) > Вращение (классика).
Выберите Предварительный просмотр, чтобы просмотреть эффект в окне документа.
Нажмите кнопку Больше, чтобы просмотреть полный список параметров, или Меньше, чтобы скрыть дополнительные параметры.
Задайте следующие параметры:
Положение.
Выберите, как вращать объект и перспективу, с которой следует его рассматривать (см. Параметры положения объемного вращения).
Поверхность.
Создает широкую гамму поверхностей, от тусклой и бестеневой матовой до блестящей и подсвеченной, которая выглядит как пластмасса (см. Параметры заливки поверхностей).
Нажмите кнопку ОК.
Любой объемный объект состоит из множества поверхностей. Например, вытянутый квадрат превращается в куб, который имеет шесть граней: верхнюю, нижнюю и четыре боковые. На каждую грань объемного объекта можно проецировать плоские рисунки. Например, может спроецировать метку или текст на бутылкообразный объект или просто добавить различные текстуры на каждой стороне объекта.
Например, вытянутый квадрат превращается в куб, который имеет шесть граней: верхнюю, нижнюю и четыре боковые. На каждую грань объемного объекта можно проецировать плоские рисунки. Например, может спроецировать метку или текст на бутылкообразный объект или просто добавить различные текстуры на каждой стороне объекта.
A. Рисунок символа B. Рисунок символа C. «A» и «Б», спроецированные на объемный объект
На объемные объекты можно отображать только рисунки, хранящиеся в палитре «Символы». Символами могут быть любые объекты Illustrator, в том числе контуры, составные контуры, текст, растровые изображения, сетки и группы объектов.
При отображении объемных объектов учитывайте следующее:
Поскольку функция «Отображение» использует для отображения символы, можно редактировать экземпляр символа, и он будет автоматически обновляться на всех поверхностях, на которые был отображен.
Работать с символом можно в диалоговом окне Проецирование с обычными ограничительными рамками для перемещения, масштабирования или поворота объекта.
В объемном эффекте все поверхности объекта с проекциями запоминаются по номерам. При редактировании объемного объекта или применении тех же эффектов к новому объекту может оказаться, что сторон больше или меньше, чем у исходного объекта. Если поверхностей меньше, чем определено для исходного объекта, лишние рисунки игнорируются.
Поскольку положение символа зависит от центра поверхности объекта, при изменении геометрии поверхности символ будет проецироваться относительно нового центра объекта.
Можно проецировать рисунки на объекты с помощью эффектов «Вытягивание и скос» или «Вращение», однако проецировать рисунки на объекты только с помощью эффекта «Поворот» нельзя.

Выделите трехмерный объект.
На панели Оформление дважды щелкните эффект 3D-вытягивание и фаска или 3D-поворот.
Выберите Проецирование.
Выберите изображение для проецирования на поверхность, выделенную в раскрывающемся меню Символ.
Чтобы выбрать поверхность объекта, на которую нужно спроецировать рисунок, нажмите кнопку первой , предыдущей , следующей и последней поверхности или введите номер поверхности в текстовое поле.
Метка светло-серого цвета появляется на поверхностях, которые видимы в настоящий момент. Темно-серым цветом помечены поверхности, невидимые при текущем положении объекта. После выбора в диалоговом окне поверхности она в окне документа окрашивается красным по контуру.
Выполните любое из следующих действий:
Чтобы переместить символ, установите курсор внутри ограничительной рамки и перетащите его. Для масштабирования перетащите боковой или угловой маркер. Для поворота перетащите наружу и ближе маркер ограничительной рамки.
Чтобы размеры проецируемого изображения совпадали с выделенной поверхностью, выберите Масштабирование по размеру.
Чтобы убрать изображение с одной поверхности, выделите поверхность с помощью параметров в разделе Поверхность и либо выберите Нет в меню Символ, либо нажмите Очистить.
Чтобы удалить все рисунки с поверхностей трехмерного объекта, нажмите кнопку Очистить все.
Чтобы применить затенение и освещение объекта к спроецированному изображению, выберите Затенить изображение.
Чтобы отображалось только спроецированное изображение, а не геометрия трехмерного объекта, выберите Невидимая геометрия. Это используется, если функция проецирования объемного изображения применяется как инструмент трехмерной деформации. Например, может потребоваться применить эту функцию для проецирования текста на сторону вытянутой волнистой линии, чтобы текст был деформирован, как на флаге.
Чтобы просмотреть эффект, выберите Предварительный просмотр.
Нажмите кнопку ОК в диалоговом окне Проецирование.
Инструменты «3D» не зависят от инструментов «Сетка перспективы» Illustrator. При помещении на сетку перспективы 3D-объекты рассматриваются как любые другие графические объекты.

Как быстро создавать объемные изображения для каталога? «Изварино Фарма» поделилась опытом использования ПО 3D-ГЕНЕРАТОР
Успех торговли в онлайн-канале во многом зависит от наличия большого количества качественных изображений товара. Наличие 3D-изображений значительно повышает конверсию в покупку. Однако создание объемных визуалов – процесс долгий и затратный. Как с помощью простого интуитивного решения в «Изварино Фарма» максимально сократили время по созданию 3D-контента, снизив его стоимость в разы?
В октябре 2021 года компания «ПРОМИС» выпустила первый релиз программного обеспечения 3D-ГЕНЕРАТОР, которое позволяет создавать объемные изображения вторичной картонной упаковки за минуты, без дизайнеров и подрядчиков, в нужных ракурсах и качестве. Благодаря инновационному продукту процесс создания визуального контента в России впервые может быть «поставлен на поток».
Благодаря инновационному продукту процесс создания визуального контента в России впервые может быть «поставлен на поток».
Это особенно актуально в связи с интенсивным развитием сегмента электронной коммерции в фарминдустрии. Появилась потребность в большом количестве качественных объемных изображений для размещения онлайн. Более 20 компаний решили протестировать специально созданный для этого IT-продукт – 3D-ГЕНЕРАТОР, в том числе ООО «Изварино Фарма».
«Мы заметили, что на интернет-порталах или совсем нет изображений, или они старые и в плохом качестве. Нам же было важно, чтобы потенциальный покупатель мог увидеть упаковку лекарственного препарата в онлайн-аптеке и оценить ее. Чтобы создать красивый контент для цифровых площадок, мы решили подключиться к тестированию 3D-ГЕНЕРАТОРа», – рассказал менеджер по цифровым коммуникациям «Изварино Фарма» Артем Корзухин.
Изображения лекарственных препаратов – первое, что видит покупатель на онлайн-площадках. Плохое качество визуального контента значительно увеличивает показатель отказов (bounce rate), а также негативно влияет на репутацию производителя, так как у покупателя могут возникнуть сомнения в подлинности продуктов.
● Дешевле и быстрее, чем услуги дизайнеров
«Раньше отдел маркетинга заказывал дизайнерские макеты, то есть дизайнер отрисовывал каждый ракурс вручную. Это довольно долго и дорого. В 3D-ГЕНЕРАТОРе, если шаблон уже создан, генерация 3D-модели занимает не более минуты», – отметил Артем Корзухин.
У дизайнера уходит около 1,5 часов на создание одного ракурса объемного изображения, 3D-ГЕНЕРАТОР сокращает это время до нескольких минут, а стоимость снижается как минимум в 3 раза. Также отпадает потребность в подготовке технического задания и контроле работы подрядчика.
Реклама на New Retail.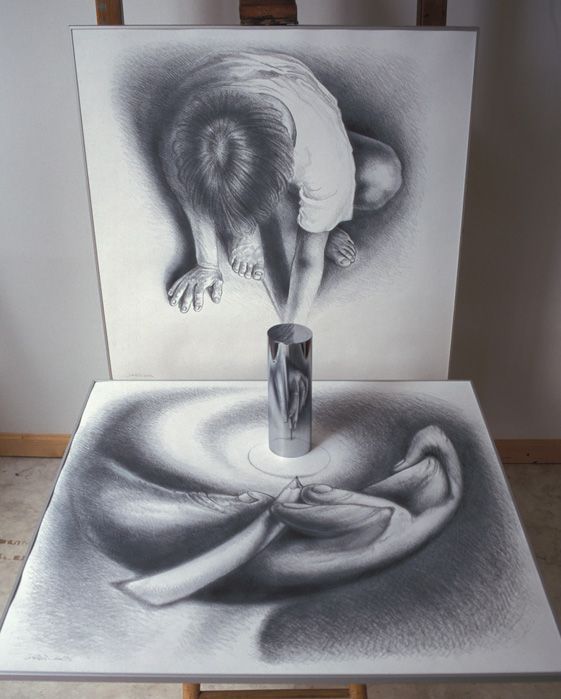 Медиакит
Медиакит
● Техническая поддержка и вводный вебинар
Высокий уровень клиентского сервиса – один из главных приоритетов АО «ПРОМИС». Крайне важно, чтобы заказчики могли быстро освоить продукт и применять его максимально эффективно.
«После подключения программного обеспечения IT-специалисты АО «ПРОМИС» показали в Skype функционал 3D-ГЕНЕРАТОРа и рассказали, как правильно с ним работать. Также на всем этапе тестирования нам оказывали техническую поддержку: мы всегда могли задать вопросы по почте или телефону и получить на них ответы», – прокомментировал менеджер по цифровым коммуникациям фармкомпании.
● Быстрая замена большого объема изображений, например, при ребрендинге
По мнению эксперта ООО «Изварино Фарма», ПО 3D-ГЕНЕРАТОР может быть особенно полезно компаниям, которые проводят ребрендинг.
Им необходимо заменить большой объем изображений на интернет-площадках в кратчайшие сроки, чтобы упаковка, которую покупатель видит в интернет-аптеке или маркетплейсе, и та пачка, которую он в итоге получает, были одинаковыми и сомнений в подлинности продукта не возникло.![]()
Читайте также:
Российские бренды одежды: ситуация с тканями, продвижением, перспективами
● Интуитивно понятный интерфейс
Артем Корзухин отметил, что сотруднику компании не обязательно иметь навыки дизайнера для работы с 3D-ГЕНЕРАТОРом, и с этим может справиться даже начинающий специалист. Интерфейс программного обеспечения удобен для большинства пользователей, так как он полностью на русском языке и интуитивно понятен.
● Доработка под нужды клиентов
«В процессе тестирования мы сталкивались с некоторыми проблемами, но техническая поддержка помогала на всех этапах. Например, на 3D-изображении не отображался фольгированный элемент. Мы обратились за помощью, и программисты решили проблему. Очень здорово, что нас услышали», — рассказал представитель компании «Изварино Фарма».
Именно клиентский опыт и обратная связь являются основой для развития и совершенствования продуктов АО «ПРОМИС», планирования и приоритизации доработок. В ближайших релизах, например, разработчики собираются добавить возможность автоматической генерации формата «серия 360» под требования маркетплейса ОЗОН.
В ближайших релизах, например, разработчики собираются добавить возможность автоматической генерации формата «серия 360» под требования маркетплейса ОЗОН.
Чтобы подробнее узнать о ПО 3D-ГЕНЕРАТОР и получить доступ к бесплатной демоверсии, вы можете отправить письмо на почту marketing@promis.ru или оставить заявку на сайте.
Создание Объёмных Изображений Лепкой, Резьбой ответы
Создание Объёмных Изображений Лепкой, Резьбой ответы. Обновленные и проверенные решения для всех уровней CodyCross Лондон группа 490
Ответ
Создание объёмных изображений лепкой, резьбой Ответ
П Л А С Т И К А
Знаменитая Династия Русских Царей И Императоров
Матроскин Считал, Что Они Есть, А Ума Не Хватает
CodyCross Лондон группа 490
CodyCross Лондон группа 490 ответы
| определение | Ответ |
|---|---|
| Второе По Величине Озеро В Европе | онежское |
| Небольшой Барабан С Удлинённым Корпусом | тамбурин |
| Раскладывать Товар По Отдельным Коробкам | фасовать |
| Тальк Для Кожи Стрептоцид Для Ран | присыпка |
| Матроскин Считал, Что Они Есть, А Ума Не Хватает | средства |
| Создание Объёмных Изображений Лепкой, Резьбой | пластика |
| Знаменитая Династия Русских Царей И Императоров | романовы |
| Одежда Кавказского Горца | черкеска |
| Кондитерское Изделие Например, Эклер | пирожное |
| Система Монтессори Или Воскобовича Для Развития | методика |
| В Ней Красная Шапочка Несла Пирожки Бабушке | корзинка |
| Тысяча Дорог С Зеркальным Отражением | лабиринт |
следующий
Планета Земля Подводный мир Изобретения Времена года В цирке Транспорт Кулинарное искусство Спорт Фауна и Флора Древний Египет Парк развлечений Средневековье Париж Казино В библиотеке Научная лаборатория На дворе 70-е Зоомагазин Нью-Йорк, Нью-Йорк! В кинотеатре Прекрасный Рим Дикий Запад В аэропорту На ферме В универмаге Показ мод На курорте Удивительная Япония Концертный зал Телестудия Дом, милый дом Круизный лайнер Греция Мир маленьких вещей Путешествуем на поезде Музей искусств Аквапарк Тур по Бразилии Восьмидесятые Время СПА Приключения в кемпинге Поездка в Испанию Вымышленный мир
Технологии объемного изображения
У американского писателя-фантаста Рэя Брэдбери в доме будущего — телевизионные стены. Человек, попадая к себе домой, сразу становится персонажем какой-нибудь истории, иллюзия окружает его со всех сторон. Такие стены — дело недалекого будущего, технологии объемного изображения стремительно развиваются. Пока первенство принадлежит созданию объемных изображений на стене акриловыми красками, 3D обоям и наливным полам.
Человек, попадая к себе домой, сразу становится персонажем какой-нибудь истории, иллюзия окружает его со всех сторон. Такие стены — дело недалекого будущего, технологии объемного изображения стремительно развиваются. Пока первенство принадлежит созданию объемных изображений на стене акриловыми красками, 3D обоям и наливным полам.
Технологии объемного изображения в живописи и графике
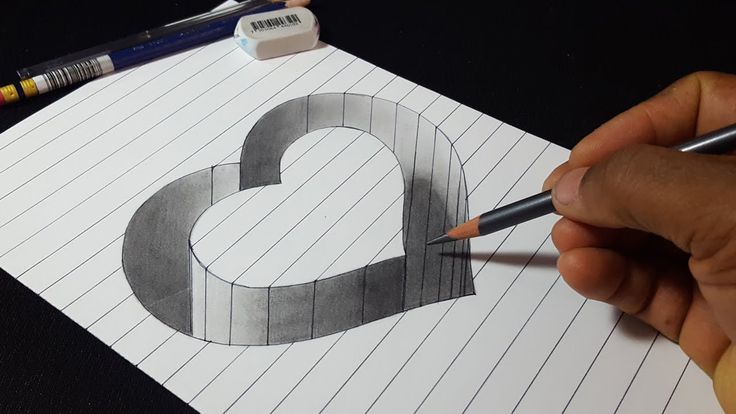
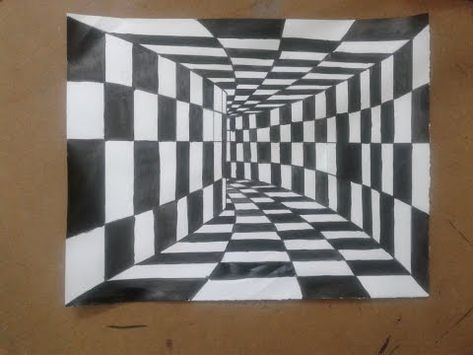
Секреты объемного изображения предметов на плоскости известны давно. Главное для художника — овладеть секретом светотени. Если правильно расположить предметы по отношению к источнику света и реалистично передать все нюансы соотношения тени и света, изображение получится объемным. Технологии объемного изображения в графике основаны на разных видах штриховки, в живописи — объем создается с помощью цветовых пятен. Правильным распределением тоновых переходов художнику удается получить реалистичные изображения, почти такие же четкие, как фотографии. Создавать более светлый и более темный тон в рамках одного цвета помогает техника лессировки: наложение полупрозрачного слоя (или нескольких) на основной цвет.
Советы по технологии создания объемных изображений в живописи и графике:
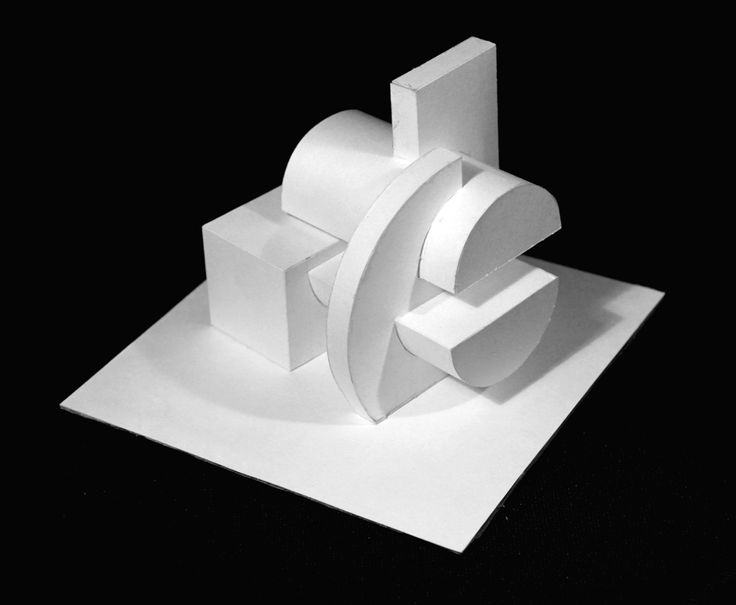
- Изучите закономерности расположения светотени на предметах разной формы. Основных форм четыре: куб, конус, цилиндр и шар — у каждой формы свои особенности. Освоив расположение светотени на каждой из четырех фигур, можно в дальнейшем разбивать сложный рисунок на составляющие части, каждая из которых будет соотноситься по своим свойствам с одной из основных форм.
- Свет и тень на картине зависят от расположения источника света. Экспериментируйте с разными углами освещения, изучайте расположение теней на реальных предметах.
- Часть предмета, на который падает свет, рисуйте более светлой, остальную — темной.
- Учитывайте, что светлые предметы кажутся зрителю ближе, чем темные.
- Рисуйте натюрморты — лучшее практическое занятие по созданию объемного изображения на плоскости.
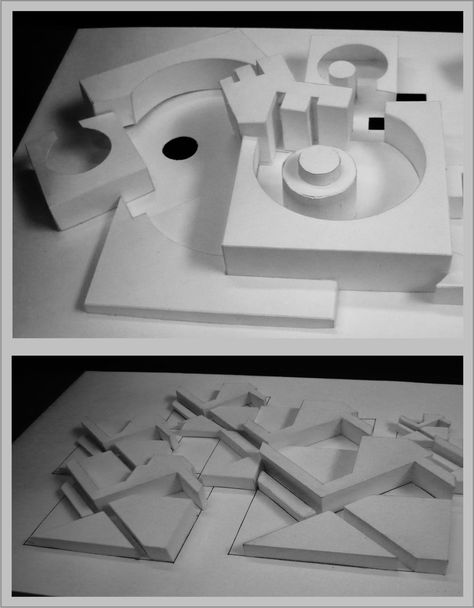
Современные художники в Королеве и других городах России не довольствуются традиционной технологией создания объемного изображения.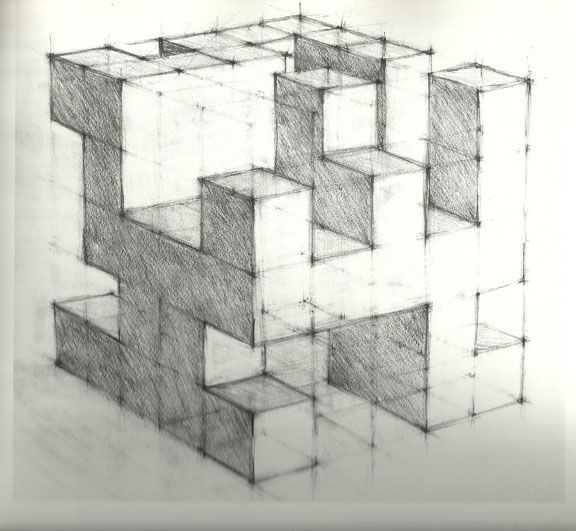 Им мало того, что изображенный предмет выглядит объемным, нужно, чтобы он выглядел гиперреалистичным, и зритель не мог отличить реальный предмет от изображения. Такая иллюзия им полностью удается. Для ее создания порой используют технические приемы, которые не имеют ничего общего с рисунком: обрезают в нужном месте бумагу, покрывают рисунок специальными составами, используют оптические свойства различных структур, чтобы обмануть зрителя. Но основной прием: сочетание тени и света — все равно актуален.
Им мало того, что изображенный предмет выглядит объемным, нужно, чтобы он выглядел гиперреалистичным, и зритель не мог отличить реальный предмет от изображения. Такая иллюзия им полностью удается. Для ее создания порой используют технические приемы, которые не имеют ничего общего с рисунком: обрезают в нужном месте бумагу, покрывают рисунок специальными составами, используют оптические свойства различных структур, чтобы обмануть зрителя. Но основной прием: сочетание тени и света — все равно актуален.
Технологии объемного изображения в интерьере
Есть несколько способов получить трехмерное изображение на своей стене:
- Заказать художественную роспись с эффектом 3D объема.
- Заказать и наклеить 3D обои.
- Заказать 3D панели.
Художественная роспись на стенах — стильный и красивый вид украшения интерьера. Как правило, он выполняется акриловыми красками с помощью аэрографа по составленному заранее эскизу. Современные краски экологичны и быстро сохнут. Кроме того, художники используют специальные добавки, которые позволяют добиться от красок различных художественных эффектов (в том числе эффекта объема).
Кроме того, художники используют специальные добавки, которые позволяют добиться от красок различных художественных эффектов (в том числе эффекта объема).
Другой вариант получения трехмерного изображения — покупка 3D обоев. Здесь возможны самые разные варианты и сюжеты. Большая часть работы дизайнера и художника уже сделана — остается наклеить обои на стену. Существуют такие разновидности 3D обоев как флуоресцентные (требуют установки специальной лампы) и светодиодные (монтируются вместе со светодиодной системой). К недостаткам 3D обоев можно отнести высокую пока стоимость и невозможность сделать подобные стены в маленькой комнате, так как с небольшого расстояния эффект 3D исчезает.
Еще один вариант получить объемный рисунок в комнате — 3D панели. Преимущества 3D панелей в комнате:
- можно самому выбрать любой рисунок — пожелания клиента ничем не ограничены;
- можно с помощью разных панелей создать в большой комнате функциональные зоны;
- стены не требуют тщательной подготовки;
- панели монтируются быстро, снимаются (при желании) тоже быстро и не требуют особого ухода.
Особенности создания трехмерного изображения на полу
Наливные полы — это та же фотопечать 3D, только выполненная на полу. Этапы создания наливных полов:
- Подготовка пола. Подготовительный этап довольно сложный. Пол тщательно очищают и выравнивают несколькими слоями грунтовки.
- Нанесение базового слоя. Полимерная масса самопроизвольно растекается по высохшей грунтовке, выравнивается и застывает. Отсюда и название — наливной пол.
- Нанесение изображения на подготовленную основу.
- Покрытие полиуретановым лаком.
В заливке полов очень важно соблюдение технологии создания трехмерного изображения. Чем «глубже» изображение, тем больше слоев требуется нанести на пол. Для создания эффектного объема приходится наносить несколько слоев полимерного состава на основе эпоксидных смол.
3D изображения на зеркалах и мебели
3D изображение на стенах и на полу пока остается дорогостоящим вариантом, но современные технологии объемного изображения позволяют получить рисунок с таким эффектом и на мебели, и на межкомнатной двери, и на зеркале — на любом, по сути, предмете интерьера, имеющем плоскую поверхность. Современная технология фотопечати позволяет нанести на мебельный фасад любое изображение любого размера с любым эффектом. Усовершенствование компьютерной графики привело к неограниченным возможностям декорирования своего дома и создания для него самых разных иллюзий. И все же одним из лучших способов украшения дома остается украшение стены самобытным и красочным живописным полотном.
Современная технология фотопечати позволяет нанести на мебельный фасад любое изображение любого размера с любым эффектом. Усовершенствование компьютерной графики привело к неограниченным возможностям декорирования своего дома и создания для него самых разных иллюзий. И все же одним из лучших способов украшения дома остается украшение стены самобытным и красочным живописным полотном.
Похожие статьи:
Художественный холст
Под словом «холст» не подразумевается какой-либо особенный материал – как правило, это различная ткань, которую используют для живописи. Художественные холсты отличаются по ряду характеристик, для определенных техник подходят различные виды ткани. Подробнее…
Мастер-классы для детей в Москве
Мастер классы для детей в г. Москва, особенно выездные, пользуются широкой популярностью в детских и взрослых кругах. Это не новое, а всегда существовавшее творчество, просто оно не было названо «модным» названием. Подробнее…
Подробнее…
Кисти для рисования. Как правильно выбрать кисть?
Чтобы правильно подобрать тип кисти, следует учесть ряд факторов: для каких материалов её подбираете, какие приспособления используете, конечно же, ваш бюджет. Также нужно обращать внимание на следующие аспекты.
Форма пучка и предназначение кисти имеют прямую связь. Вот перечень наиболее популярных форм для покраски.
Подробнее…
Монохромные цвета в интерьере
Монохромный интерьер может быть чрезвычайно уютным. Современные виды и способы нанесения краски: аэрография, технология создания трехмерных изображений, имитация различных фактур — способны превратить в живописное полотно не только холст, но и всю квартиру. Отдать предпочтение монохромным цветам в интерьере — стильно, красиво, модно, необычно.
Подробнее…
Приложения для создания 3D-фото — топ-5 лучших программ
Сегодня, чтобы создавать объёмные изображения совсем необязательно обладать продвинутыми навыками работы в графических редакторах. На просторах интернета можно встретить ряд приложений, которые в два клика накладывают 3Д-эффект на обычные фотографии.
На просторах интернета можно встретить ряд приложений, которые в два клика накладывают 3Д-эффект на обычные фотографии.
Содержание
- 1 Что такое 3D-фото
- 2 Какими способами можно создать на компьютере или телефоне
- 3 Топ-5 лучших приложений
- 3.1 LucidPix
- 3.2 Fyuse
- 3.3 Camera 3D Pro
- 3.4 FILM3D
- 3.5 Parallax: 3D Photo Live Camera
- 4 Полезное видео
- 5 Заключение
Что такое 3D-фото
3Д-изображение позволяет создать эффект реалистичности наряду с ощущением погружённости. Ранее для вёрстки трёхмерного объекта нужна была дорогостоящая техника: камеры, объективы и другая оптика, купить которую рядовому пользователю не под силу.
Но с развитием технологий эффект объёма можно получить в пару кликов, имея на руках лишь смартфон и специфическое программное обеспечение. Теперь нет необходимости тратить десятки часов на освоение «Фотошопа» и другого графического софта. Достаточно установить специальное приложение на телефон, а всё остальное возьмёт на себя искусственный интеллект.
Полезно также почитать: Обзор телеграмм-каналов о 3D
Какими способами можно создать на компьютере или телефоне
Увы, но программного обеспечения для быстрого создания объёмных изображений из обычных фотографий не существует. То есть все важные этапы вёрстки, вроде отрисовки карты глубины, наложение слоёв и прочее придётся выполнять вручную. В Сети можно найти онлайн-сервисы для конвертирования снимков в стереоскопические изображения, но для их просмотра необходимы специальные очки.
Разработчики подобного софта делают упор именно на сегмент мобильных гаджетов. Последние имеют в своём распоряжении камеры, посредством которых и создаются 3Д-изображения.
Среди прочих редакторов для ПК можно отметить вездесущий Photoshop и его ближайший аналог по части 3Д – GIMP. Для создания 3Д-фото придётся потратить несколько часов на изучение функционала, поэтому новичкам целесообразнее посмотреть в сторону программ для мобильных устройств.
Топ-5 лучших приложений
Сразу стоит предупредить, что весь нижеописанный софт крайне требователен к качественной составляющей камеры смартфона или планшета. На откровенно бюджетных устройствах получить достойный результат крайне сложно.
LucidPix
Это одно из самых лучших решений для новичков, а также обладателей бюджетных смартфонов с более или менее нормальными камерами. В отличие от аналогов данное приложение не требует для захвата смену перспектив, равно как и специальных дополнений.
Достаточно сделать снимок с помощью штатного софта или средствами LucidPix, после чего искусственный интеллект преобразует его в трёхмерное изображение. Судя по отзывам пользователей на выходе получаются вполне достойные 3Д-фото.
Полученным материалом можно поделиться с друзьями в социальных сетях: WhatsApp, Facebook, iMessage, Instagram и прочих. LucidPix распространяется совершенно бесплатно для устройств на платформе Android и iOS. Единственное, что иногда смущает пользователей, так это время от времени всплывающая реклама в приложении.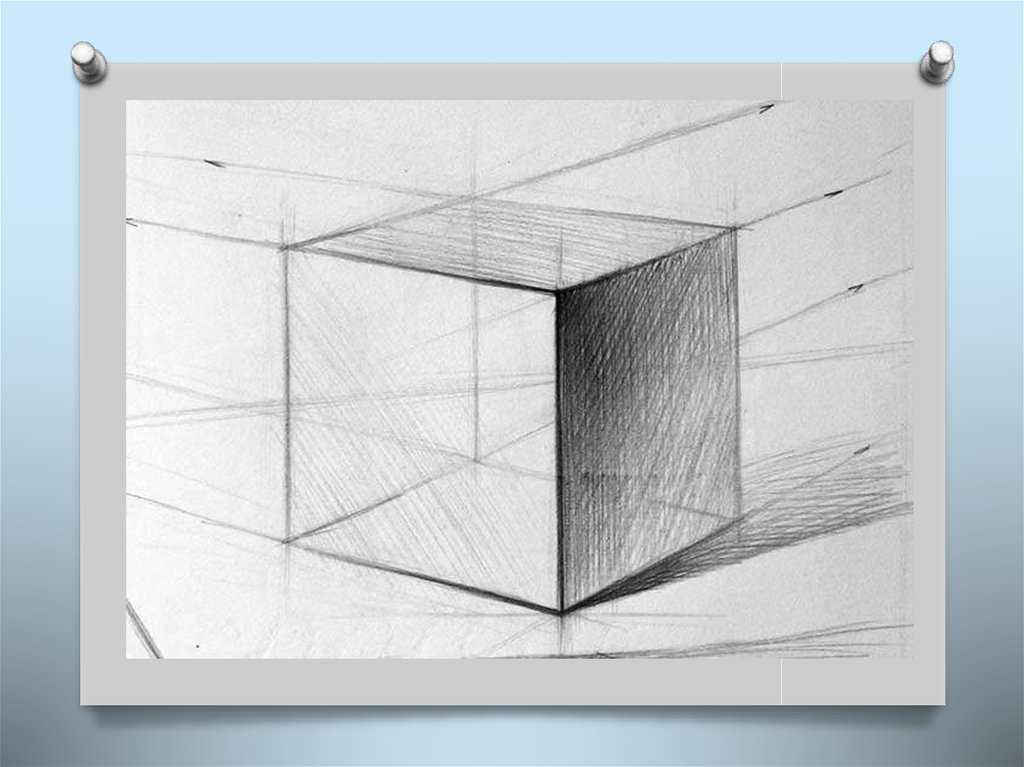
Fyuse
Программа вышла на рынок довольно давно, но разработчики регулярно выпускают актуальные обновления. Fyuse позволяет создать подобие видео панорам, что придаёт снимку 3Д-эффект. После запуска приложения мастер-помощник предложит сфокусировать камеру на интересующем объекте. Далее программа отрисует несколько линейных маркеров, по которым нужно будет следовать, перемещая камеру от одной точки к другой.
По окончанию захвата приложение обработает снимок и через минуту другую выдаст результат. Таким образом мы получаем зацикленное видео с эффектом глубины. 3Д-изображением можно поделиться в трёх социальных сетях: Instagram, Facebook и Twitter, или же просто сохранить его в памяти телефона.
Fyuse распространяется бесплатно, но в отличие от аналогичных приложений здесь совершенно нет рекламы. Программа хорошо адаптирована как под платформу Android, так и iOS: потребляет ресурсы по минимуму и не мешает работе ключевых служб.
Camera 3D Pro
Программа работает с панорамой, поэтому для получения объёмного фото потребуется перемещать камеру согласно указаниям мастера-помощника. Судя по отзывам пользователей, местный функционал никак нельзя назвать интуитивно понятным. У многих на его освоение уходит не один час.
Судя по отзывам пользователей, местный функционал никак нельзя назвать интуитивно понятным. У многих на его освоение уходит не один час.
Съёмку приходится выполнять с помощью двух рук, удерживая кнопки захвата в интерфейсе программы. Camera 3D Pro предлагает несколько вариантов трёхмерных снимков на выходе: 3D-Color, Wiggle, Stereo, Mono или классический Regular.
Программа ресурсоёмкая, поэтому на аппаратах прошлых поколений работает с заметными задержками. К тому же 3Д-снимки на выходе получаются массивными, занимая как минимум 100 Мб, что для бюджетных устройств с малым объёмом памяти весьма существенно.
Приложение распространяется по условно-бесплатной лицензии и как следствие обременено многочисленной рекламой, отключить которую можно оформив платную подписку. Camera 3D Pro работает только на платформе iOS.
FILM3D
Принцип работы приложения – комбинирование быстро сменяющихся кадров. Меняя ракурс программа создаёт эффект объёма. Посредством местных фильтров можно практически как угодно отредактировать полученный результат. После установки и запуска FILM3D сразу переходит в рабочий режим.
После установки и запуска FILM3D сразу переходит в рабочий режим.
Процедура захвата длится от 3 до 10 секунд, что зависит от сложности сцены и технических возможностей телефона. После спуска затвора необходимо следовать установленным маркерам, перемещая телефон с одной точки на другую. По окончанию захвата программа приступает к обработке материала (около 30 секунд) и выдаёт результат.
3Д-изображение можно сохранить в формате GIF или МР4. Приложение привязано только к сервису Instagram, поэтому публикация в другие социальные сети происходит в ручном режиме. Также стоит заметить, что объёмные фото от FILM3D занимают довольно много места.
Приложение распространяется по условно бесплатной лицензии с ограниченным функционалом для платформы iOS. Как таковой рекламы здесь нет, за исключением презентации самого продукта. Но на выходе получается материал с водяными знаками. Чтобы избавиться от последних или открыть доступ к расширенному функционалу придётся оформить подписку.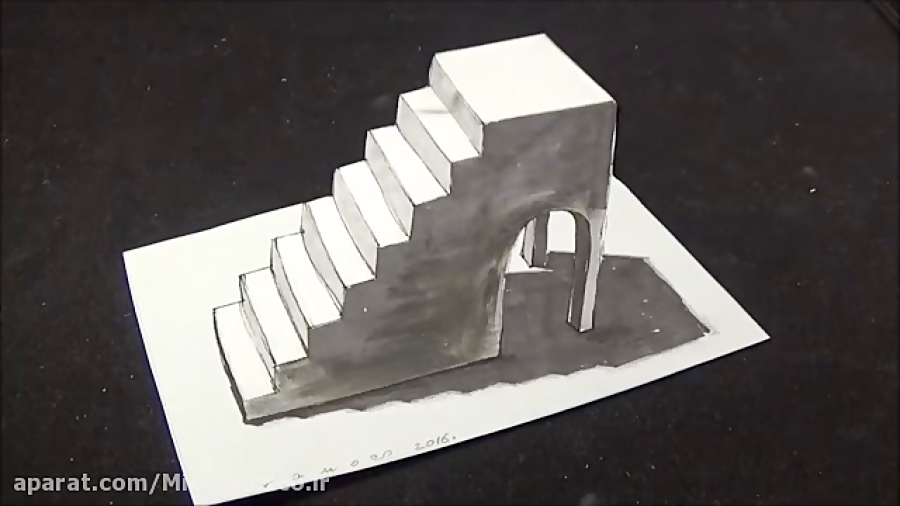
Parallax: 3D Photo Live Camera
После запуска программа сразу начинает захват изображения. Суть процедуры заключается в том, чтобы держать перекрестие на объекте, пока пользователь перемещается вокруг него. Приноровиться к такому формату съёмки достаточно сложно, поэтому многие пользователи, судя по отзывам, испытывают серьёзные проблемы, получая посредственный результат.
Явный плюс приложения – понятный интерфейс, быстрая работа и скромные объёмы полученных 3Д-изображений. Программа разработана только для платформы iOS. Распространяется бесплатно, но с существенными ограничениями по функционалу. Для снятия последних нужна платная подписка.
Полезно также почитать: 3D-графика в фильмах
Полезное видео
Заключение
Помимо специализированных приложений объёмные изображения можно создавать в своём профиле Facebook.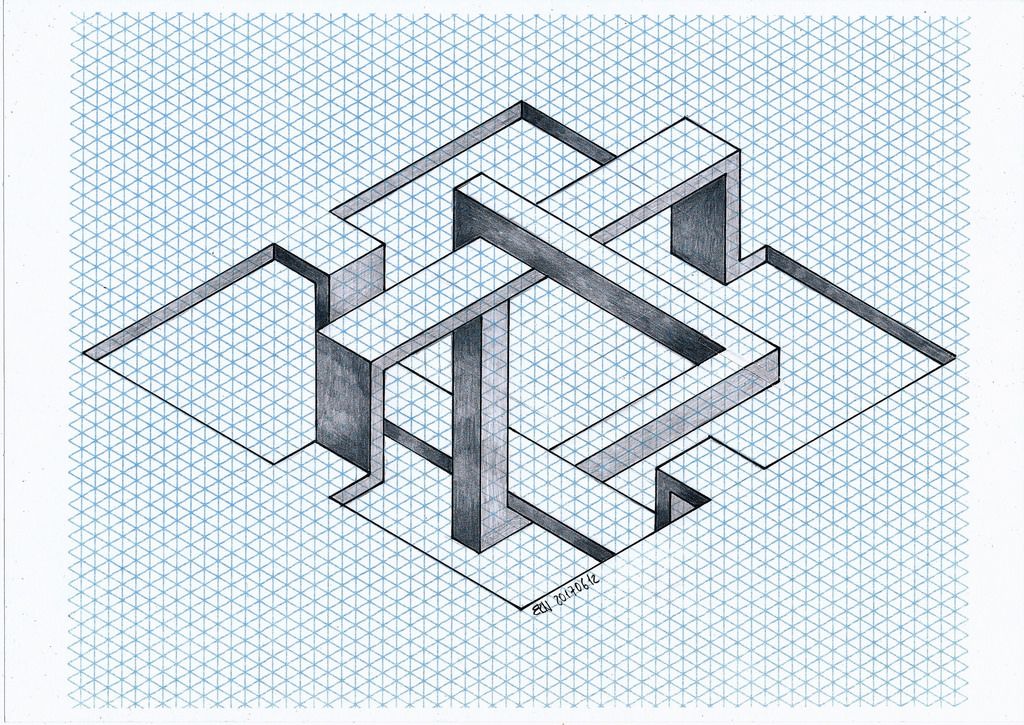 Но опять-таки потребуется установить на смартфон с камерой фирменный софт (Play Market или AppStore).
Но опять-таки потребуется установить на смартфон с камерой фирменный софт (Play Market или AppStore).
В разделе «Создание публикаций» достаточно выбрать пункт «3D-фото» и загрузить снимок с телефона. К обработке принимаются только необрезанные изображения без ранее наложенных фильтров. Следует избегать фото зеркал, стёкол, а также объектов с нечёткой текстурой и размытыми краями.
Как создавать трехмерные изображения
Трехмерные (трехмерные) изображения представляют собой представление объекта в трех измерениях (длина, глубина и высота). Создание трехмерной графики можно разделить на три этапа. Первый шаг определяет форму объекта в процессе, называемом 3D-моделированием. Второй шаг включает в себя размещение и движение объектов на этапе, называемом макетом и анимацией, а на последнем этапе создается окончательное изображение объекта.
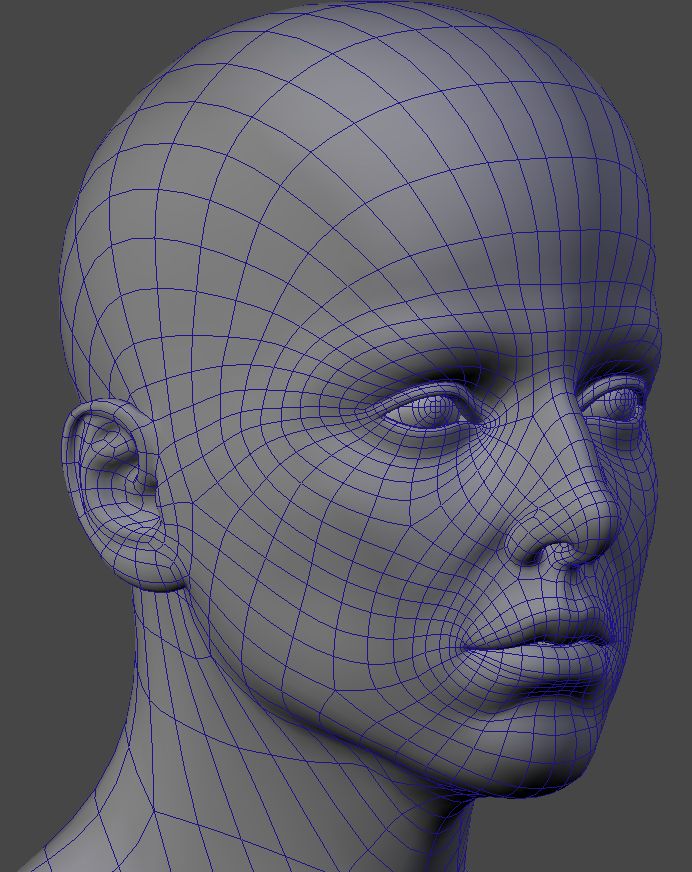
Трехмерное моделирование
Трехмерное моделирование включает создание базовой трехмерной формы или каркаса объектов. Это можно сделать с помощью различных методов, таких как сканирование формы реального объекта в компьютер с использованием инструментов 3D-моделирования, процедурное моделирование с использованием набора алгоритмов или физическое/динамическое моделирование.
Это можно сделать с помощью различных методов, таких как сканирование формы реального объекта в компьютер с использованием инструментов 3D-моделирования, процедурное моделирование с использованием набора алгоритмов или физическое/динамическое моделирование.
3D-моделирование сегодня используется в большинстве отраслей, таких как медицинская промышленность для детального представления органов, индустрия развлечений для видео и компьютерных игр, киноиндустрия для визуальных эффектов и машиностроительная промышленность для 3D-рендеринга новых устройств, планы зданий или конструкции транспортных средств.
Процесс моделирования может осуществляться посредством полигонального моделирования, при котором точки соединяются, а грани многоугольников создают изображение объекта. Это также может быть с помощью NURBS-моделирования, когда точки снова используются, но для их соединения и создания изображения используются изогнутые линии.
Макет и анимация
Этот шаг включает в себя размещение объекта в сцене. Здесь определяются пространственные отношения объектов, которые должны быть в одной сцене, и учитываются такие факторы, как местоположение и размер. Некоторыми из часто используемых методов для этого шага являются захват движения или цифровая запись движений, инверсная кинематика или определение правильного углового положения элементов соединенного объекта, а также создание ключевых кадров, которое определяет начальную и конечную точки плавного перехода через кадры.
Здесь определяются пространственные отношения объектов, которые должны быть в одной сцене, и учитываются такие факторы, как местоположение и размер. Некоторыми из часто используемых методов для этого шага являются захват движения или цифровая запись движений, инверсная кинематика или определение правильного углового положения элементов соединенного объекта, а также создание ключевых кадров, которое определяет начальную и конечную точки плавного перехода через кадры.
Движение на этом этапе создается путем последовательного отображения серии изображений, похожих друг на друга, для создания иллюзии движения. Кадры могут быть заменены виртуальным скелетом, и компьютер автоматически вычисляет различия во внешнем виде между последующими кадрами с помощью процесса, известного как морфинг или анимация.
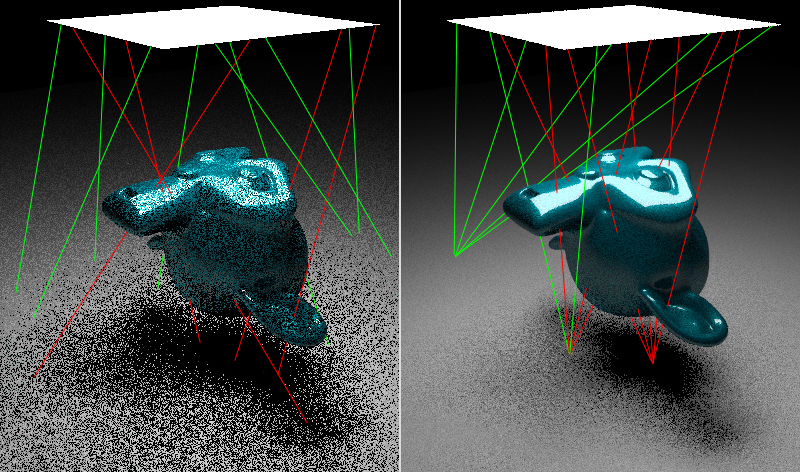
Рендеринг
Рендеринг — это этап, на котором модель преобразуется в изображение путем интеграции световых эффектов, таких как тени и рассеяние света. Сегодня одной из популярных моделей отражения, используемых при рендеринге 3D-графики, является модель отражения Фонга. Это определяет, как свет отражается или преломляется от поверхности в любой заданной точке объекта и как изменяются свойства материалов объекта на указанной поверхности. Для создания этого эффекта используется несколько техник, и некоторые из них: плоское затенение, затенение Гуро, наложение текстуры, затенение Фонга, затенение Cel и затенение рельефа.
Это определяет, как свет отражается или преломляется от поверхности в любой заданной точке объекта и как изменяются свойства материалов объекта на указанной поверхности. Для создания этого эффекта используется несколько техник, и некоторые из них: плоское затенение, затенение Гуро, наложение текстуры, затенение Фонга, затенение Cel и затенение рельефа.
На этом этапе используется программное обеспечение для компьютерной 3D-графики, позволяющее проецировать изображение в 3D. Различные методы рендеринга включают рендеринг по линиям развертки, лучистость, трассировку лучей и каркасный рендеринг.
Программное обеспечение, используемое для создания 3D-изображений
В мире искусства и анимации существует множество различных программ, которые пользователь может использовать для создания реалистичных и детализированных цифровых изображений. Однако эти программы часто имеют ограниченную функциональность и могут создавать только 2D-изображения. Когда пользователь хочет создать более художественное изображение, ему нужно программное обеспечение, способное создавать 3D-изображения. В этой статье будет перечислено несколько таких программ, которые способны не только создавать 3D-изображения, но и улучшать искусство пользователя, предоставляя ряд дополнительных функций, обычно не встречающихся в другом программном обеспечении.
В этой статье будет перечислено несколько таких программ, которые способны не только создавать 3D-изображения, но и улучшать искусство пользователя, предоставляя ряд дополнительных функций, обычно не встречающихся в другом программном обеспечении.
Blender
Blender — это бесплатный набор инструментов для создания и редактирования 3D-изображений с открытым исходным кодом, который может работать на любой платформе. Blender включает в себя функции моделирования, оснастки, развертки UV, создания скинов, анимации, рендеринга, текстурирования, нелинейного редактирования и композитинга. Blender также может создавать воду, дым, частицы и другие симуляции. Программное обеспечение также можно использовать для создания видеоигр, анимации и других визуальных эффектов, которые невозможно создать с помощью простого программного обеспечения для редактирования 2D-фотографий. Пользователи могут даже писать свои собственные сценарии в Blender и использовать их для создания мощных 3D-эффектов.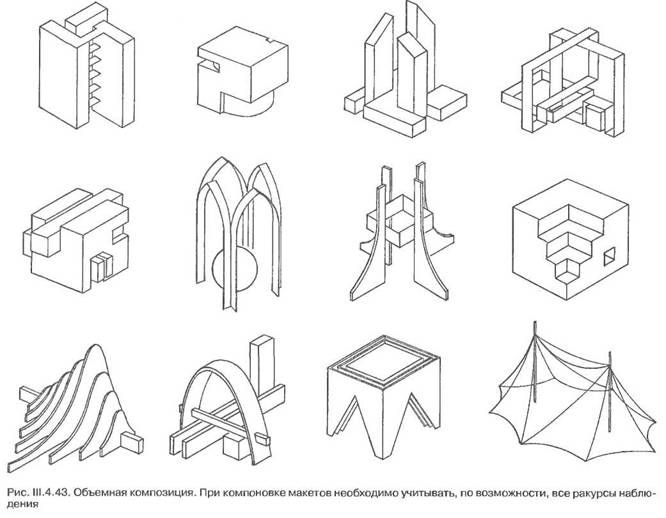 Программное обеспечение было написано на C, C++ и Python и может работать в Linux, Mac OS X, Windows, FreeBSD, IRIX и Solaris. Программное обеспечение можно загрузить по адресу http://www.blender.org/download/get-blender/.
Программное обеспечение было написано на C, C++ и Python и может работать в Linux, Mac OS X, Windows, FreeBSD, IRIX и Solaris. Программное обеспечение можно загрузить по адресу http://www.blender.org/download/get-blender/.
AutoDesk SoftImage
AutoDesk SoftImage — это программа для создания 3D-изображений, разработанная специально для проектирования и визуализации высококачественных 3D-симуляций лица и тела. AutoDesk SoftImage также можно использовать для создания других визуальных эффектов, таких как фейерверк, вода, дым и свет. Программное обеспечение может создавать как движущиеся, так и неподвижные изображения, такие как столы, деревья и пейзажи. Используя как сценарии, так и графические элементы управления, пользователи могут создавать подробные симуляции реальных событий для использования в видеоиграх, анимации и других движущихся изображениях. AutoDesk SoftImage доступен для бесплатной пробной версии и может быть приобретен за 3,79 долларов США.0 с http://usa.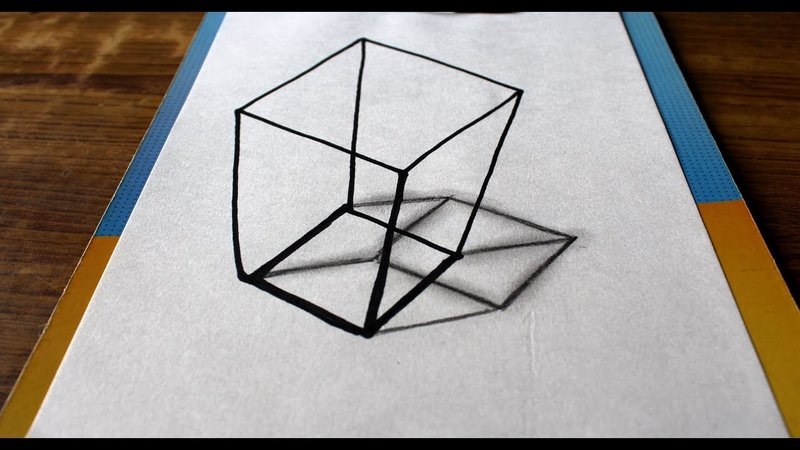 autodesk.com/adsk/servlet/pc/index?siteID=123112&id=13571168 .
autodesk.com/adsk/servlet/pc/index?siteID=123112&id=13571168 .
Effect3D
Effect3D — еще один инструмент для создания трехмерных изображений, используемый для создания сложных трехмерных изображений. В Effect3D используется несколько иной метод, чем в других программах для создания изображений, поскольку он позволяет пользователю просто вводить текст для создания объектов в графическом интерфейсе. Effect3D включает в себя базу данных готовых изображений, которые пользователи могут использовать в своих симуляциях. Программное обеспечение довольно простое по сравнению с другими программами для редактирования фотографий, но оно обеспечивает простое решение для создания 3D-изображений и является очень хорошим выбором для начинающих. Effect3D доступен для бесплатной пробной версии и может быть приобретен за 39 долларов США..95 с http://www.reallusion.com/e3dstudio/.
Callipygian 3D
Callipygian 3D — очень простое в использовании программное обеспечение для редактирования анаглифных фотографий, способное создавать полноцветные анаглифы за короткое время. Анаглиф — это просто неподвижный или движущийся объект, который состоит из множества разных цветов и выглядит трехмерным, когда копия изображения помещается поверх оригинала. Callipygian 3D очень упрощает эту задачу, предоставляя пользователю все необходимые инструменты для создания анаглифических изображений. Программное обеспечение может создавать цветы, пейзажи и другие визуальные эффекты, комбинируя вместе различные цвета и изображения. Callipygian 3D полностью бесплатен и доступен по адресу http://www.callipygian.com/3D/.
Анаглиф — это просто неподвижный или движущийся объект, который состоит из множества разных цветов и выглядит трехмерным, когда копия изображения помещается поверх оригинала. Callipygian 3D очень упрощает эту задачу, предоставляя пользователю все необходимые инструменты для создания анаглифических изображений. Программное обеспечение может создавать цветы, пейзажи и другие визуальные эффекты, комбинируя вместе различные цвета и изображения. Callipygian 3D полностью бесплатен и доступен по адресу http://www.callipygian.com/3D/.
HumanEyes 3D
HumanEyes 3D — отличная программа для тех, кто хочет создавать мощные трехмерные изображения. Программное обеспечение специально создано для графических проектов и может использоваться фотографами, дизайнерами и полиграфистами. На самом деле у фотографов, дизайнеров и печатников есть свои особенности, которые позволяют им лучше выполнять свою работу. Например, фотографы могут сделать снимок и отредактировать его с помощью HumanEyes 3D, чтобы создать реалистичное трехмерное изображение.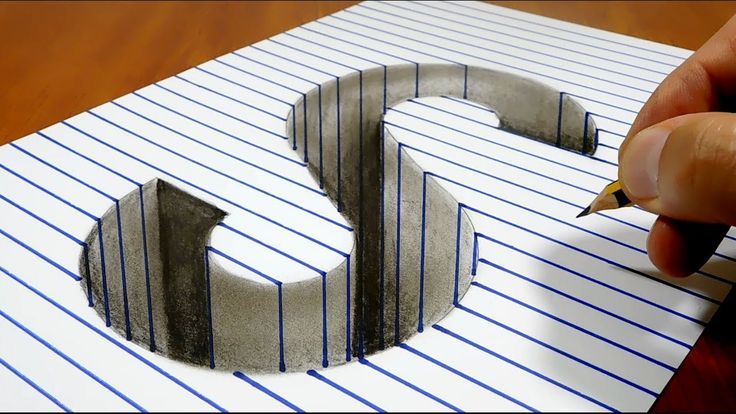 HumanEyes 3D доступен для 60-дневной бесплатной пробной версии и может быть приобретен за 19 долларов США.9-200 долларов, в зависимости от конкретной версии, которая нужна пользователю. Программное обеспечение можно найти на http://www.humaneyes.com/.
HumanEyes 3D доступен для 60-дневной бесплатной пробной версии и может быть приобретен за 19 долларов США.9-200 долларов, в зависимости от конкретной версии, которая нужна пользователю. Программное обеспечение можно найти на http://www.humaneyes.com/.
3D-фотография — The Ultimate History Project
3-d: явно викторианского происхождения
Томас Френч
Рис. 4. Стереоскопические иллюстрации Уитстона
Учитывая недавнюю популярность таких фильмов, как Тор, и Аватар, , некоторые могут полагать, что трехмерная технология — это инновация двадцать первого века, но на самом деле это определенно девятнадцатый век; на самом деле, это так же старо, как и сама фотография.
Первые стерео или трехмерные фотографии были сделаны в 1839 году, в том же году, когда началась практическая фотография. Даже 3D-пленка — старая концепция, поскольку Томас Эдисон играл с идеей стереоскопической кинопроекции в 1891 году, в том же году, когда лаборатория Эдисона представила свой кинетоскоп.
В 1830-х годах, когда происходила революция в фотографической науке, понимание визуального восприятия, особенно в связи с пониманием того, как люди воспринимают глубину — бинокулярное зрение — также менялось.
Вплоть до 1830-х годов многие люди считали, что у нас есть два глаза просто для того, чтобы видеть еще объектов. Хотя некоторые люди предполагали, что наши два глаза позволяют нам видеть «вокруг» объекта, было мало понимания того, почему рисунки и картины выглядят «плоскими», несмотря на огромные усилия художников по точному воспроизведению изображаемых предметов.
Слово «стереоскоп», относящееся к исследованию способности нашего разума мгновенно и незаметно для нас объединять две слегка отличающиеся точки зрения в одну, так что мы осознаем свое место в трехмерном пространстве, приписывается сэру Чарльзу Уитстону. Его работа по исследованию стереоскопии была впервые упомянута в 1833 году Гербертом Мэйо, профессором анатомии Королевского колледжа в Лондоне, в его книге «9».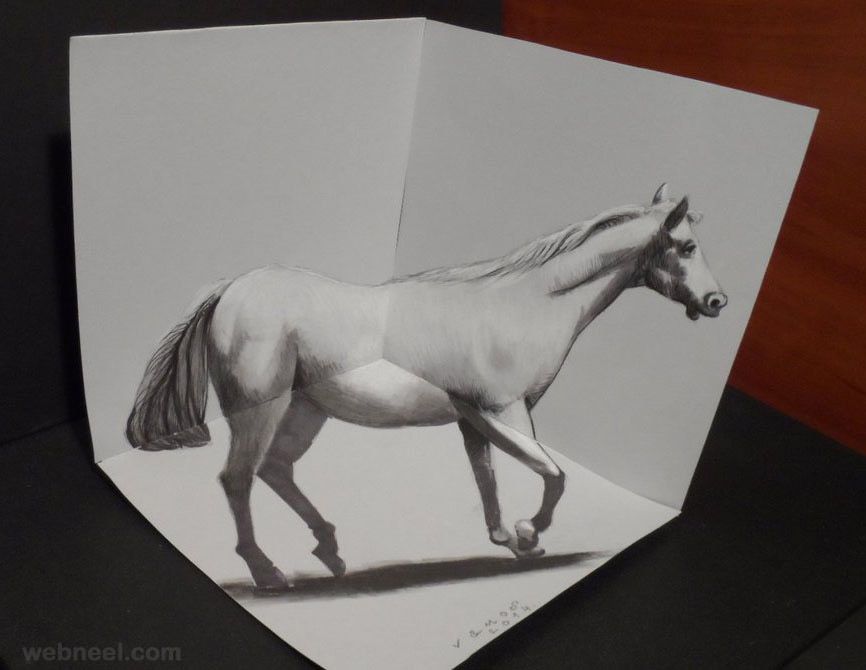 0065 Очерки физиологии человека. Назвав результаты Уитстона «замечательными», Мэйо объяснил исследование Уитстона о том, как «твердый объект… рассматриваемый обоими глазами, проецирует разную перспективу… на каждую сетчатку».
0065 Очерки физиологии человека. Назвав результаты Уитстона «замечательными», Мэйо объяснил исследование Уитстона о том, как «твердый объект… рассматриваемый обоими глазами, проецирует разную перспективу… на каждую сетчатку».
Уитстон наконец опубликовал «Вклад в физиологию зрения — часть первая». О некоторых замечательных и до сих пор ненаблюдавшихся явлениях бинокулярного зрения, г. 1838 г. — за год до установленной даты начала практической фотографии. В свою работу Уитстон включил серию парных рисунков (рис. 4) преимущественно геометрических фигур. Соответствующие стороны каждой пары были нарисованы, чтобы имитировать немного отличающуюся перспективу человеческих глаз. Если смотреть так, что левый глаз видит только левую сторону, а правый глаз видит только правую сторону, мозг «обманывается», заставляя думать, что он видит один трехмерный объект.
Иллюстрации Уитстона можно рассматривать в стереоскоп, но они достаточно просты, чтобы их можно было рассматривать «от руки», подобно стереограммам Magic Eye, популярным в 1990-х годах. Единственное отличие иллюзии трехмерности от реальности нашего бинокулярного зрения состоит в том, что со стереоизображениями вы действительно смотрите на «плоскую поверхность» только с одной фокусной точкой. В результате потребители 3D-технологий иногда называют изображения «выскакивающими». Через год после публикации работы Уитстона Уильям Генри Фокс Талбот (и мистер Коллен) сделал первые трехмерные фотографические стереоизображения, используя новый фотографический процесс Талбота; однако прошло более десяти лет, прежде чем был представлен практический метод просмотра стереоизображений вместе с бинокулярной камерой, камерой с двумя линзами, разнесенными примерно на такое же расстояние, как между глазами (2 1/2 дюйма). Первоначально Уитстон создал устройство для просмотра стереоскопических изображений с использованием серии зеркал, но в 1849 г.Сэр Дэвид Брюстер, изобретатель калейдоскопа, сконструировал линзовидный стереоскоп, в котором вместо зеркал использовалась линза. Большая часть спроса на эти фотографии была связана со стереопортретами, сделанными в студии, но многие фотографы отправились в поле с переносными фотолабораториями, оборудованием и химикатами, чтобы запечатлеть пейзажи, архитектуру и известные достопримечательности. Уильям и Фредерик Лангенхаймы создали одни из первых стереоскопических изображений в Соединенных Штатах с серией видов с Ниагарского водопада, Филадельфии, Вашингтона, округ Колумбия, и Нью-Йорка в 1854 году (рис. 6a-6c). Другие последовали за ним. | Рис. 5: Стереоскоп Брюстера.
Портативное устройство с немного более широким
ширина, чем просматриваемая стереокарта. Рис. 6а: Ниагарский водопад из Пойнт-проспект, 1859 г., авторство братьев Лангенхайм. Рис. 6b: Ниагарский водопад, летний вид, водопады вдалеке, с картины братьев Лангенхайм, 1855–1856 гг. Рис. 6c: Ниагарский водопад, зимний вид, Край водопада Подкова, Лангенхайм Братья. |
 Этот лентикуляр был проще в использовании и более портативный. Коробка, похожая на бинокль (рис. 5), была представлена массам на первой Всемирной выставке, Международной выставке в Лондоне 1851 года, также известной в Хрустальном дворце или Большой выставке. Королева Виктория и принц Альберт просмотрели доступные стереоизображения, и рынок стереоизображений стал популярным.
Этот лентикуляр был проще в использовании и более портативный. Коробка, похожая на бинокль (рис. 5), была представлена массам на первой Всемирной выставке, Международной выставке в Лондоне 1851 года, также известной в Хрустальном дворце или Большой выставке. Королева Виктория и принц Альберт просмотрели доступные стереоизображения, и рынок стереоизображений стал популярным.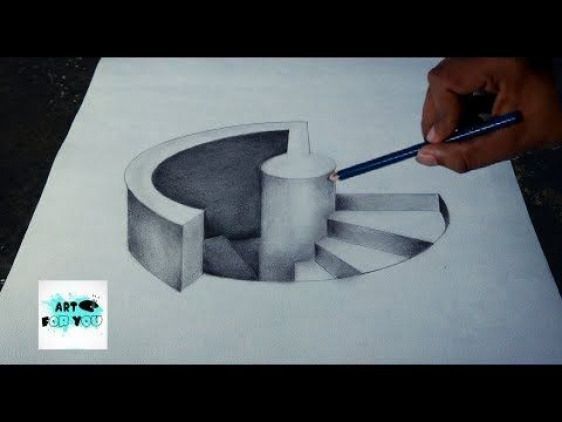
Рис. 7: Стереоскоп Холмса-Бейтса, разработанный в начале 1860-х гг.
Похожая тенденция наблюдалась и в Европе, когда Т.Р. Уильямс, который записал простую пасторальную деревенскую жизнь в серии стереовидов (около шестидесяти), сделанных примерно в семидесяти милях к западу от Лондона, которые примечательны своей художественной композицией. Даже сегодня эти изображения популярны: Брайан Мэй, гитарист рок-группы Queen, недавно собрал и опубликовал эти изображения в Потерянная деревня .
К концу десятилетия существовали миллионы стереоизображений, демонстрирующих сотни, если не тысячи локаций, давая людям возможность мельком увидеть места, о которых раньше они могли только прочитать. Подсчитано, что за десять лет после Великой выставки миллион человек, в основном средний и высший класс, владел одним из стереоскопов Брюстера вместе с коллекциями стереокарт.
Подсчитано, что за десять лет после Великой выставки миллион человек, в основном средний и высший класс, владел одним из стереоскопов Брюстера вместе с коллекциями стереокарт.
В начале 1860-х феномен стереоскопического изображения привлек внимание доктора Оливера Венделла Холмса. Врач, а также известный писатель, Холмс увидел необходимость в более легком и дешевом зрителе. Он разработал скелетную версию и вместе с Джозефом Бейтсом усовершенствовал ее до устройства, с которым люди знакомы сегодня (рис. 7). В этом зрителе есть скоба для удержания карт, которая скользит по центральному корешку. Известный как стереоскоп Холмса-Бейтса, его упрощенная и легкая конструкция, а также низкая стоимость произвели революцию на рынке и принесли стереоскопию в миллионы домов.
В течение следующих двадцати-тридцати лет карты и зрители стали повсеместными. Фотографы всего мира теперь решили вести хронику мира в 3D. Наиболее распространенными видами были города, чудеса природы и туристические направления с изображениями от Йосемити до Йеллоустона, Чикаго, Лондона, Парижа и египетских пирамид.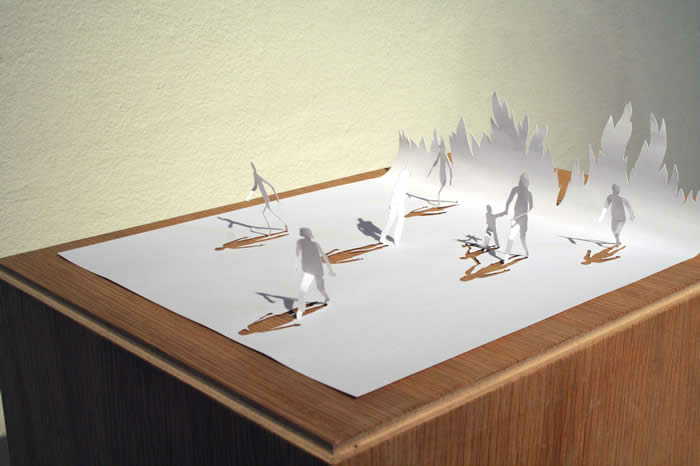 Для этих зрителей были воспроизведены даже небольшие города и отдаленные места от Бангора, штат Мэн, до водопадов Кайахога, штат Огайо, до Дарби, штат Монтана, Доусон-Сити и Клондайк.
Для этих зрителей были воспроизведены даже небольшие города и отдаленные места от Бангора, штат Мэн, до водопадов Кайахога, штат Огайо, до Дарби, штат Монтана, Доусон-Сити и Клондайк.
Фотографы также документировали исторические события. Гражданская война широко фотографировалась в 3D множеством фотографов (рис. 8). На самом деле, хотя многие изображения этой войны, сделанные Мэтью Брейди, были опубликованы как отдельные изображения, многие из его изображений были сделаны в 3D. Бокс-сеты с этими изображениями стали популярны к концу века. Компания Underwood and Underwood, основанная двумя братьями в Оттаве, штат Канзас, начала продавать стереоскопы в 1881 году. Фотографы также делали постановочные снимки, в которых часто использовались комические инсценировки. Используя настройки студии, которые изображали дома, спальни, школьные классы и даже внешние локации, эти виды были созданы как по отдельности, так и как часть серии, рассказывающей историю. Наряду с выделением различных степеней озорства (включая незаконную деятельность), 3D-изображения подчеркивали опасность употребления алкоголя при изучении таких тем, как брак, романтические отношения и даже неверность (однако действительно порнографические стереоизображения встречаются редко). К 1920-м годам компания Keystone View доминировала на рынке стереоскопических изображений. Но, нуждаясь в консолидации своего рынка во время Великой депрессии, Keystone все больше внимания уделяла школам и библиотекам. Хотя компания Keystone производила стереоскопические изображения до 1964 года, выпуск пленки меньшего размера (35, 16 и 8 мм) привел к изменению формата. Вместо распечатанных изображений на карточке теперь представлялись изображения | Рис. 8: Мертвый солдат Конфедерации в окопах, T.C. Роч. Рис. 9а: Юнион-стрит, арендованная Великим землетрясением — Сан-Франциско, Калифорния, Андервуд и Андервуд. Рис. 9b: Здание Фелана, остатки руин когда-то великой деловой структуры, разработанной Андервудом и Андервудом. Рис. 9с: Пожарная машина, раздавленная падающей стеной, Пост-стрит, Сан-Франциско. Катастрофа, Х.К. Уайт Ко |
 Через несколько лет они продавали стереоскопы и виды от двери к двери. В 1897 году они представили свою семидесятидвухкарточную карту «Tour Around the World». Она была настолько популярна, что они представили несколько других бокс-сетов с отдельными странами.
Через несколько лет они продавали стереоскопы и виды от двери к двери. В 1897 году они представили свою семидесятидвухкарточную карту «Tour Around the World». Она была настолько популярна, что они представили несколько других бокс-сетов с отдельными странами. Их набор «Путешествие по миру», в котором изначально было 600 карточек, теперь был расширен до 1200 и продан школам.
Их набор «Путешествие по миру», в котором изначально было 600 карточек, теперь был расширен до 1200 и продан школам.View Masters Tru-Vue представила обтекаемый портативный просмотрщик, сделанный из бакелита, ранней формы пластика. Но после появления Sawyer View-Master с цветными изображениями Kodachrome Tru-Vue не смогла конкурировать. Хотя Tru-Vue пыталась сделать цветные представления в 1949, они слишком сильно отставали от тренда. В 1952 году Tru-Vue была продана Сойеру вместе с долгосрочным контрактом, заключенным Tru-Vue с Walt Disney Productions на права на некоторых персонажей Диснея в формате 3D. Более миллиарда катушек View-Master было продано с момента их создания в 1939 году, и они продолжают производиться сегодня компанией Fisher-Price, дочерней компанией Mattel. | Рис. 10а: Вид с Западного Бродвея и Рида, 11 сентября 2001 г., Брайан. Лубе. Рис. 10b: Обломки Башни 2, 11 сентября 2001 г., Брайан Луб. |
 Люди вставляли рулонную кассету с диафильмом из четырнадцати парных черно-белых изображений, которые перемещались с помощью рычага на средстве просмотра.
Люди вставляли рулонную кассету с диафильмом из четырнадцати парных черно-белых изображений, которые перемещались с помощью рычага на средстве просмотра.Зрители 1950-х годов в 3D-очках. Всеобщее достояние.
Другие формы трехмерной фотографии
Хотя мы ассоциируем красные и зеленые картонные очки с трехмерными фильмами 1950-х годов, эта технология, использующая анаглифические изображения, на самом деле довольно старая.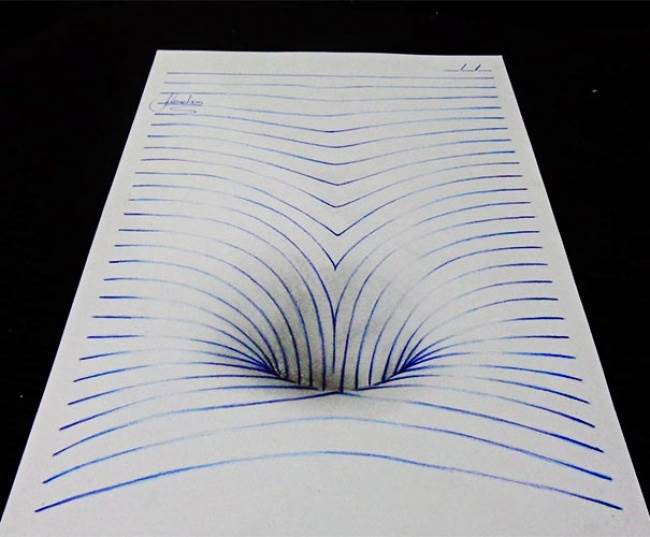 Изобретенное в 1853 году Вильгельмом Роллманном анаглифическое слайд-шоу с волшебными фонарями уже в 1858 году демонстрировалось зрителям в красных и зеленых очках. Уильяма Фризе-Грина (e), пионера кинематографии, часто приписывают созданию первых трехмерных изображений. Анаглифическое кино в начале 1890 с.
Изобретенное в 1853 году Вильгельмом Роллманном анаглифическое слайд-шоу с волшебными фонарями уже в 1858 году демонстрировалось зрителям в красных и зеленых очках. Уильяма Фризе-Грина (e), пионера кинематографии, часто приписывают созданию первых трехмерных изображений. Анаглифическое кино в начале 1890 с.
Но приложение взорвалось в 1950-х годах благодаря таким фильмам, как Существо из Черной лагуны и многим комиксам. Принцип анаглифии по-прежнему используется в современных 3D-фильмах, хотя сам процесс стал более сложным. Во многих трехмерных театральных кинопостановках используются поляризованные очки, в которых два изображения с разной поляризацией накладываются на экран, а затем с помощью очков преобразуются в два отдельных изображения (по одному для каждого глаза). Более продвинутые системы включают в себя «активные» жидкокристаллические очки с дрожанием, управляемые передатчиком, который координирует изображения на киноэкране для синхронизированных электрических импульсов через линзы, чтобы затемнить одну линзу или другую (со скоростью, незаметной для зрителя).
Именно эта технология применяется сегодня во многих трехмерных проекционных и телевизионных системах, хотя отсутствие согласия по стандартизированной системе осложнило ее принятие. Несмотря на это, 3D явно был частью фотографии и кино с момента их изобретения и будет продолжать влиять на мир, в котором мы живем, будь то виртуальные миры игр, навигация дронов или плоские экраны наших гостиных. Технология 3D-экранов без использования специальных очков уже существует и доступна на современных 3D-камерах. Только стоимость препятствует коммерциализации, но, как и многие другие технологии, она, скорее всего, будет преодолена.
ПРИСОЕДИНЯЙТЕСЬ К НАМ НА FACEBOOK |
Этот поразительно умный метод превращает 2D-изображения в 3D
Эта удивительная демонстрация демонстрирует новый метод создания действительно 3D-изображений из 2D-изображения. Добро пожаловать в мир Neural Radiance Fields.
Для общества, которое просматривает практически все средства массовой информации на двухмерных дисплеях, мы с большим энтузиазмом относимся к изображению трехмерных миров. Возможно, это потому, что мы живем в трехмерном мире, но наши телевизоры на самом деле давно стремятся к идеальной плоскостности. В любом случае, большинство попыток создания трехмерных объемных дисплеев, которые мы видели, далеки от фантастики.
Возможно, в результате совершенно ошеломляющего количества инженерных усилий, затраченных на устройство, преобразующее трехмерную информацию о сцене в двухмерное изображение. Современные графические процессоры существуют только из-за необходимости делать это быстро. Идея пойти другим путем — от двухмерных изображений к трехмерным сценам — это то, что действительно возможно только с фотограмметрией в компьютерную эпоху, а фотограмметрия часто весьма ограничена в своих возможностях, учитывая огромное количество информации. представляет собой 3D-сцена. Как и в случае со многими методами компьютерной графики, наша способность извлекать данные 3D-сцены из 2D-изображений быстро улучшилась — и после появления различных воплощений ИИ произошел значительный всплеск качества, как и во многих ранее сложных задачах.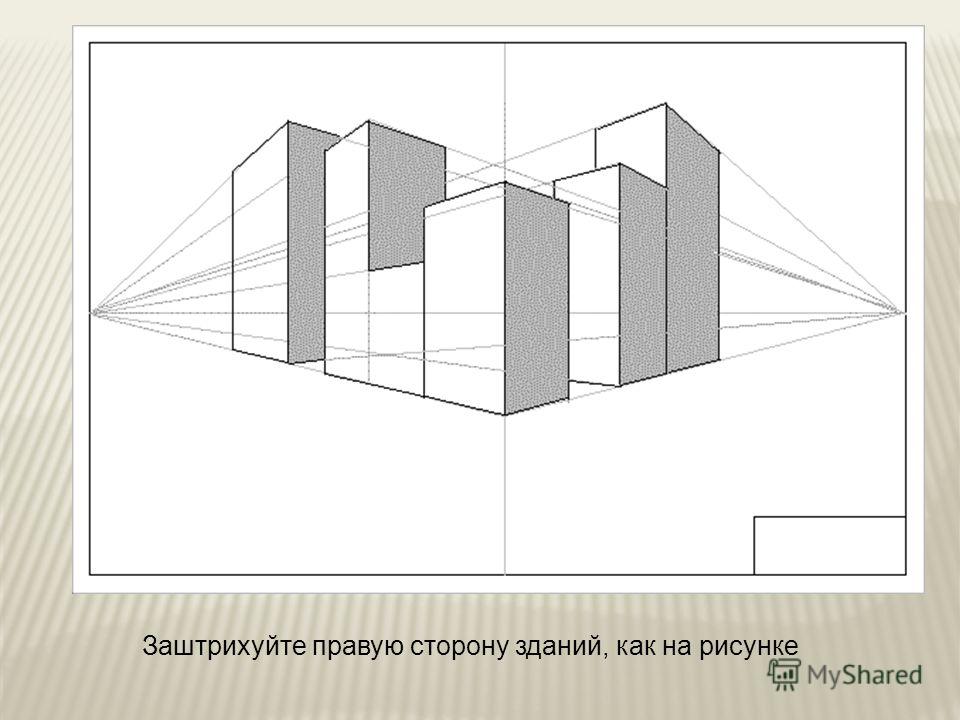
Никогда не совсем ясно, откуда люди берут названия для этих вещей, но, как говорится в научных статьях, «нейронные поля излучения» — довольно заманчивое название. Вам простительно предположить, что это научно-фантастический термин для обозначения какой-то псионической силы. Проще говоря — настолько просто, что авторы статьи могли бы возразить, — это метод построения трехмерных моделей вещей на основе нескольких фотографий этой вещи. Или, выражаясь в терминологии статьи, «имея набор входных изображений сцены… мы оптимизируем объемное представление сцены как векторнозначную функцию, которая определена для любой непрерывной 5D-координаты, состоящей из местоположения и направление взгляда». SIGGRAPH вот и мы.
Что здесь особенно важно, так это «местоположение и направление взгляда»; это не просто умная анимация между фотографиями, и у нас гораздо больше свободы для просмотра получившейся сцены, чем при других подходах. Кажется, это подход, основанный на плотности, оценивающий и воссоздающий сцену как настоящий трехмерный объем на основе объединенной информации с множества разных камер; эта комбинация помогает сохранять точность.
Это, безусловно, намного лучше, чем предыдущие методы работы со сложными предметами. Видео включает в себя хорошо прорисованные кадры парусного корабля с тонким такелажем, на котором старая техника плохо работает. Здесь следует отметить, помимо улучшения производительности, что «старая техника» восходит к… 2019 году.. К этому времени в следующем году мы сможем отправить описание художественного фильма в одно предложение на компьютер и уже к следующему дню разместить его на Netflix.
Поля нейронного излучения могут предложить еще несколько трюков, помимо того, что они просто позволяют нам летать по сцене. Зеркальные отражения и некоторые аспекты освещения можно обрабатывать независимо от видимого положения камеры, поэтому мы можем перемещать блики на объекте без изменения угла обзора. По крайней мере, это необычно. Также возможно синтезировать канал глубины, изображение в оттенках серого, где яркость пикселя представляет его расстояние от зрителя. Результаты, похоже, аналогичны извлечению глубины, продемонстрированному Фраунгофером с массивами камер со световым полем, хотя и с более низким уровнем шума и, возможно, пригодным для очень чистого композитинга без зеленого экрана. Это стоит упомянуть здесь, потому что надежный канал глубины — это то, ради чего многие супервайзеры визуальных эффектов с радостью купили бы на eBay своих близких родственников.
Это стоит упомянуть здесь, потому что надежный канал глубины — это то, ради чего многие супервайзеры визуальных эффектов с радостью купили бы на eBay своих близких родственников.
И это тоже проблема, потому что все демонстрации включают в себя статические сцены. Некоторые из демонстрационных сцен основаны на рендеринге компьютерной графики для создания набора изображений объекта из контролируемой последовательности положений камеры, хотя некоторые из сцен в реальном времени, по-видимому, были сняты не более чем камерой мобильного телефона. небольшая область, чтобы дать процессу некоторый параллакс для работы. Это убедительно, но было бы интересно посмотреть, можно ли это применить к движущимся изображениям. Некоторые современные методы хорошо работают со статическими изображениями, но недостаточно постоянны для каждого кадра, чтобы их можно было применить к работе с кино. В идеале можно представить себе студию, в которой сцена могла бы сниматься несколькими камерами — в повествовании упоминается от двадцати до пятидесяти, по крайней мере, для разумно ограниченных углов обзора.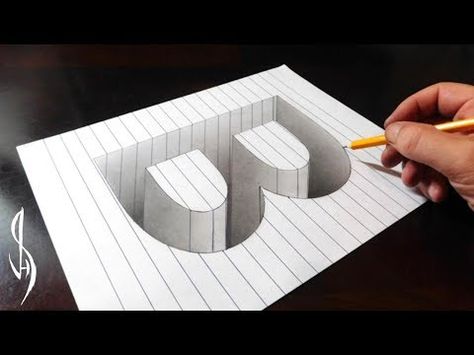 Техники, подобные показанным в видео, затем можно использовать для создания полной трехмерной модели живого действия.
Техники, подобные показанным в видео, затем можно использовать для создания полной трехмерной модели живого действия.
Который мы затем визуализируем с использованием техники визуальных эффектов и снова переводим обратно в 2D для отображения с использованием обычных развлекательных технологий, по крайней мере, до тех пор, пока все не будут смотреть телевизор в гарнитурах виртуальной реальности… что заставит вас задуматься.
Теги: Технологии
Элементарные методы создания трехмерной оценки координат и реконструкции изображения из серии двумерных изображений
На этой странице0003
Увеличение вычислительной мощности в последние годы открыло новые возможности для методов обработки изображений. Трехмерное распознавание объектов, идентификация, оценка позы и картографирование становятся популярными. Потребность в том, чтобы объекты реального мира отображались в трехмерном пространственном представлении, значительно возрастает, особенно с учетом скачка кучи, который мы получили за последнее десятилетие в виртуальной реальности и дополненной реальности. В этой статье обсуждается алгоритм преобразования массива захваченных изображений в оценочные 3D-координаты их внешних отображений. Также обсуждаются элементарные методы создания трехмерных моделей. Эта структура поможет сообществу оценить трехмерные координаты объекта выпуклой формы по серии двумерных изображений. Построенная модель может быть дополнительно обработана для увеличения сходства с входным объектом по форме, контуру и фактуре.
Потребность в том, чтобы объекты реального мира отображались в трехмерном пространственном представлении, значительно возрастает, особенно с учетом скачка кучи, который мы получили за последнее десятилетие в виртуальной реальности и дополненной реальности. В этой статье обсуждается алгоритм преобразования массива захваченных изображений в оценочные 3D-координаты их внешних отображений. Также обсуждаются элементарные методы создания трехмерных моделей. Эта структура поможет сообществу оценить трехмерные координаты объекта выпуклой формы по серии двумерных изображений. Построенная модель может быть дополнительно обработана для увеличения сходства с входным объектом по форме, контуру и фактуре.
1. Введение
Обработка трехмерных изображений включает в себя визуализацию, обработку и анализ наборов данных трехмерных изображений. С увеличением вычислительной мощности методы обработки изображений эволюционировали от традиционного двухмерного анализа к генерации и анализу пространств и объектов в трех измерениях. Вышеупомянутый скачок в мобильных вычислениях помог в исследованиях по трехмерному представлению обычных объектов [1]. Такие приложения, как виртуальная реальность и дополненная реальность, требуют преобразования объектов реального мира в цифровые представления для безупречного опыта.
Вышеупомянутый скачок в мобильных вычислениях помог в исследованиях по трехмерному представлению обычных объектов [1]. Такие приложения, как виртуальная реальность и дополненная реальность, требуют преобразования объектов реального мира в цифровые представления для безупречного опыта.
1.1. Дескрипторы и представление объектов
Твердые физические объекты имеют определенную форму и размер. Размер объекта можно рассматривать как контур измерений, определяемых его длиной, шириной и высотой [2]. Объект в трех измерениях при захвате по существу создает вид объекта с точки зрения устройства захвата (например, камеры). Это приводит к созданию двумерной декартовой плоскости, где каждая единица представлена пикселем, представляющим собой комбинацию красного, синего и зеленого цветов. Таким образом, захват изображения представляет собой функцию, генерирующую двумерные координаты сцены, дающие вид с точки захвата [3].
Рассмотрим случай захвата материального выпуклого объекта.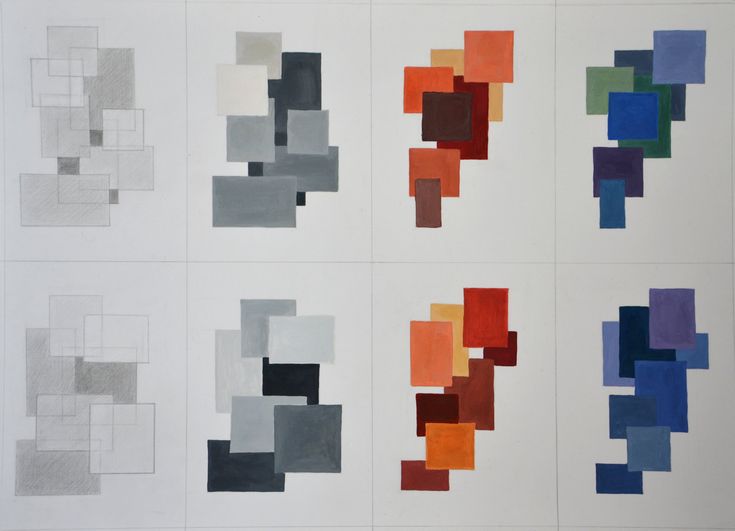 Дескрипторы формы объекта могут различаться, если смотреть на него под разными углами или с разных сторон. В основном существует два типа объектов в отношении этого свойства: (1) Объекты, имеющие однородную внешнюю форму (Тип A)(2) Объекты, которые не имеют однородной формы (Тип B)
Дескрипторы формы объекта могут различаться, если смотреть на него под разными углами или с разных сторон. В основном существует два типа объектов в отношении этого свойства: (1) Объекты, имеющие однородную внешнюю форму (Тип A)(2) Объекты, которые не имеют однородной формы (Тип B)
Здесь «форма» соответствует контур объекта, описываемый краями объекта. Форма первого набора объектов может быть единообразно выражена единым дескриптором, в то время как последний тип требует описания с разных точек зрения. Например, футбольные мячи принадлежат к первой категории, форма которых обычно может быть названа «круглой» или «сферической», тогда как такой объект, как степлер, не может быть описан универсальной формой. Несмотря на то, что характер формы остается одинаковым для первой категории, цвет и текстура могут различаться по всему объекту [4, 5].
Края объекта, относящегося ко второй категории, при захвате не могут описать форму всего объекта, так как изображение не дает восприятия с других ракурсов [6].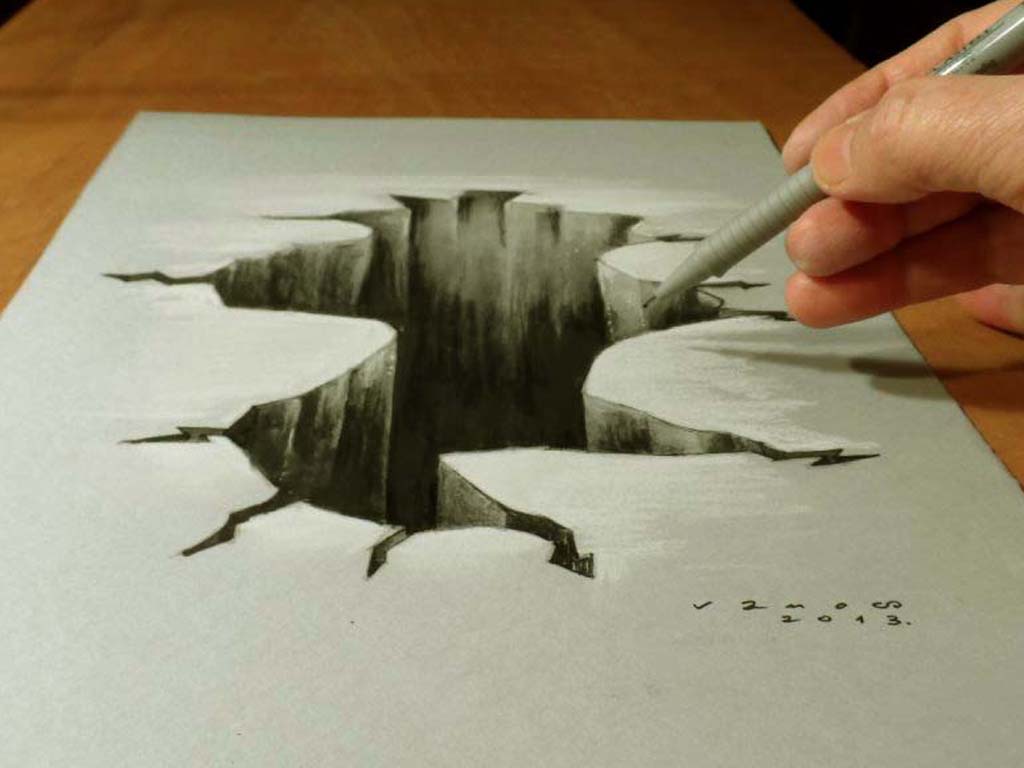 Таким образом, объект в трех измерениях представляется без учета «глубины» объекта [7].
Таким образом, объект в трех измерениях представляется без учета «глубины» объекта [7].
1.2. Приложения
Существует множество приложений, в которых трехмерные объектные модели используются в качестве примитивных компонентов. Приложения дополненной реальности и виртуальной реальности являются наиболее часто наблюдаемыми примерами того же самого. Выездной контроль и демонстрация технических работ, учебные пособия по оборудованию или моделированию медицинских операций, руководства по подгонке компонентов и т. д. [8, 9].] несколько примеров. Такие сгенерированные трехмерные модели играют важную роль и в мультимедийных приложениях, где используются макеты объектов. К ним относятся видеозвонки с объектами, находящимися рядом с вызывающим абонентом, приложения для просмотра 3D-изображений и т. д.
Для любого из этих приложений очень важно иметь точно созданные модели объектов. Независимо от того, является ли целью создание иммерсивного опыта для людей или создание составного представления объектов, процесс рендеринга требует предварительно построенных объектных моделей [10, 11].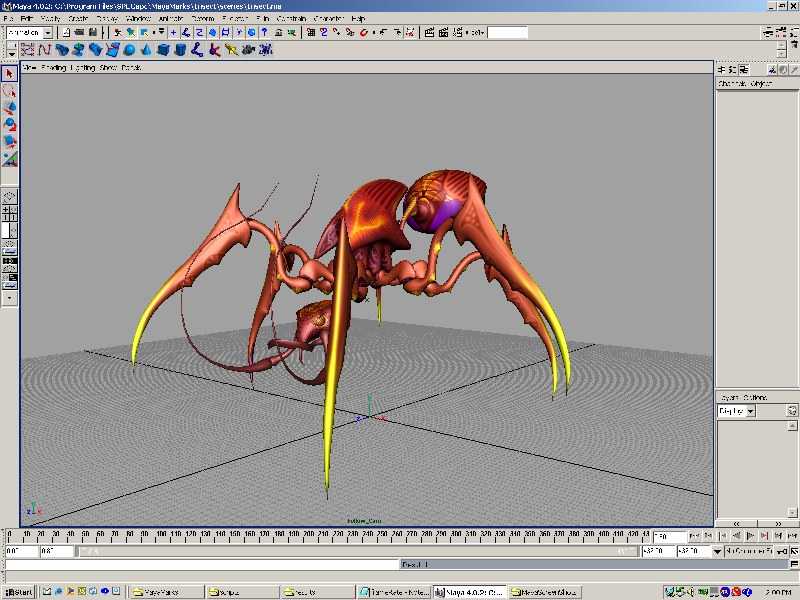 Часто пользователи сравнивают имеющиеся модели с реальными объектами реального мира. Следовательно, требуется новый метод создания хотя бы предварительной структуры объектов.
Часто пользователи сравнивают имеющиеся модели с реальными объектами реального мира. Следовательно, требуется новый метод создания хотя бы предварительной структуры объектов.
2. Базовая информация
При наличии объекта проектировщику приходится тратить значительное количество времени на проектирование каждого компонента с учетом его глубины, формы и других характеристик в программах автоматизированного проектирования (САПР). Процесс проектирования утомителен и требует квалифицированного труда для каждого компонента в отношении его глубины, формы и других характеристик, которые должны быть спроектированы [12, 13].
Использование трехмерных моделей в приложениях становится все более популярным. Существует значительный компромисс между качеством сгенерированных моделей и ручными усилиями, затрачиваемыми в процессе моделирования. Никакие одни и те же модели отображения не могут быть универсально применены к объектам. Относительное пространственное расположение элементов необходимо учитывать на всех уровнях процесса проектирования объекта. Это исследование состоит из предложения методов преобразования объекта в его трехмерное отображение. Предлагаемая структура рассматривает общие объекты [14, 15].
Это исследование состоит из предложения методов преобразования объекта в его трехмерное отображение. Предлагаемая структура рассматривает общие объекты [14, 15].
2.1. Существующие исследования
Как упоминалось ранее, существуют различные исследования, в которых обсуждаются различные алгоритмы создания трехмерных карт для стереоскопических изображений, изображений РСА и т.д. Недавняя цифровизация настаивает на выходе за пределы ограничений традиционных методов обработки фотографий. Существуют исследования, в которых сравниваются существующие алгоритмы реконструкции, используемые в различных приложениях. Обзор, посвященный триангуляции и стереозрению [16–19], сравнил скорость, точность и практичность различных алгоритмов, используемых в сценарии параллакса движения. В этом исследовании также перечислены различные подходы, такие как подходы на основе изображений, вокселей и объектов для реконструкции сцены и геометрического параллакса [20, 21]. Несмотря на то, что не было упоминания о генерации координат объекта, метод ограничивающей рамки использовался для объектов [22] для оценки их положения.
SV3DVision [23] представляет собой алгоритм генерации карты глубины, используемый для реконструкции сцен на основе одной входной фотографии. Предложенный выше метод использует ввод одной фотографии, тогда как более калиброванный метод [24], использующий параллельные оси, использует стереоскопическую систему. Оба этих исследования сосредоточены на идентификации близко расположенных и удаленных объектов для создания карты глубины с упором на приложения роботизированного зрения [25]. Метод на основе силуэта [26, 27], основанный на подходе объемного пересечения, также доступен в области исследований реконструкции 3D-моделей. Однако в предложенном выше исследовании используются калибровка камеры и оценка ограничивающего куба для извлечения силуэта с использованием триангуляции и прореживания.
Помимо алгоритмических методов, обсуждавшихся в предыдущих исследованиях, также доступны подходы, основанные на нейронных сетях [28, 29]. В этих исследованиях проводится оценка глубины человеческого тела, лица, видео и т. д. Эти исследования предлагают состязательные методы для выполнения реконструкции в подходах с одним и несколькими представлениями [30, 31].
д. Эти исследования предлагают состязательные методы для выполнения реконструкции в подходах с одним и несколькими представлениями [30, 31].
Для упрощения процесса автоматизированного проектирования методы должны предлагать реконструкцию объектов с наименьшим количеством изображений. Несмотря на то, что подход основан на стереоскопическом зрении, метод триангуляции все же можно использовать для реконструкции сцены. Особенности картируются для триангуляции [14, 32]. Однако для этого требуются специальные настройки камеры; поэтому не всем следовать. Эта проблема устранена в исследовании [33], в котором для реконструкции рассматриваются стереопоследовательности, снятые с помощью портативных камер. Этот метод генерирует карты диспаратности и границы объектов в бестекстурных областях [34]. Хотя это единственное исследование, в котором обсуждались портативные камеры, оно также было сосредоточено на реконструкции сцены/пространства, тогда как наше требование состоит в том, чтобы сгенерировать то же самое для объектов [13].
Различные методы, такие как бинокулярное несоответствие, параллакс движения, размытие изображения, линейная перспектива, триангуляция, метод размытия изображения и процесс силуэта, имеют свои преимущества и недостатки [35]. Мы должны рассмотреть недостатки и преимущества каждого из этих подходов, чтобы найти лучшее решение.
Мы заметили, что в области реконструкции и реконструкции помещений за последние годы произошли значительные улучшения с точки зрения применяемых методов. Научные исследования в области параллаксной фотографии помогают реконструировать плотную трехмерную геометрию пространства или сцены. Однако в отношении реконструкции малых объектов с разных точек зрения прогресс не столь велик [35]. Однако исследования, связанные с оценкой и реконструкцией объектов, до сих пор не пользуются популярностью. Важно отметить, что ни одно из исследований не способствует ускорению процесса автоматизированного проектирования. Мы считаем, что это исследование станет инициативой в области реконструкции трехмерных объектов, поскольку ни одно из исследований не имеет никаких указаний на достижение этой цели.
2.2. Постановка задачи
Компьютеризированное проектирование обеспечивает очень точное представление объектов для визуализации, анализа размеров и других приложений. Объекты представлены либо в трехмерных метрических пространствах, либо векторными ребрами. Исходя из вышеизложенного, задача исследования состоит в том, чтобы сгенерировать метрические точки в трех измерениях на основе входного набора изображений вокруг объекта. Рисунок 1 представляет собой общую систему нашего исследования.
В статье рассматривается алгоритм создания предварительных моделей объектов, которые можно использовать для дальнейшей обработки. Исследование сосредоточено только на воспроизведении внешней структуры данного объекта; проблема не сосредоточена на воспроизведении или предсказании внутренней структуры объекта. Также дано визуальное сравнение некоторых входных объектов и сгенерированных объектных моделей.
3. Методология
Отмечено, что создание трехмерных моделей требует очень сложного и дорогостоящего оборудования для захвата. Наша цель — предоставить основу даже для обычных людей, где можно было бы использовать обычные портативные камеры. Также важно обсудить масштаб цели. В идеале объекты должны вращаться как сверху, так и снизу. Однако наша сфера деятельности не сосредоточена на этом. Рассмотрим стандартное представление кубика Рубика на плоскости, как показано на рисунке 2. С помощью нашего метода мы можем построить основную форму куба с левой, передней, правой и задней сторонами (кроме белой и желтой граней), то есть восстановление формы, окружающей данный объект, а не его вид сверху и снизу.
Наша цель — предоставить основу даже для обычных людей, где можно было бы использовать обычные портативные камеры. Также важно обсудить масштаб цели. В идеале объекты должны вращаться как сверху, так и снизу. Однако наша сфера деятельности не сосредоточена на этом. Рассмотрим стандартное представление кубика Рубика на плоскости, как показано на рисунке 2. С помощью нашего метода мы можем построить основную форму куба с левой, передней, правой и задней сторонами (кроме белой и желтой граней), то есть восстановление формы, окружающей данный объект, а не его вид сверху и снизу.
Наша постановка задачи говорит о том, что нам требуется ряд изображений для ввода. Существует большое количество баз данных 3D-объектов, таких как IKEA3D, LDOS, ObjectNet3D и Thingi10 K, и в нашем случае они неприменимы. Из имеющихся наборов данных наиболее подходящим для наших нужд является COIL-100 [11].
3.1. Набор данных Описание и актуальность
Мы используем набор данных COIL-100 для проведения исследования.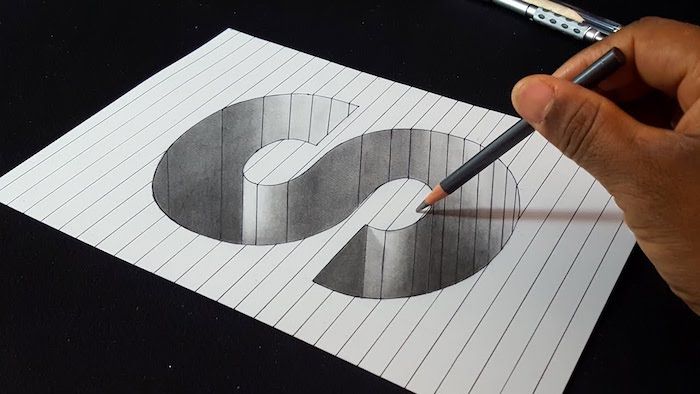 COIL-100 был собран Центром исследований интеллектуальных систем при факультете компьютерных наук Колумбийского университета. Это набор данных на основе изображений, состоящий из цветных изображений 100 различных мелких объектов, снятых под разными углами. Чтобы быть более точным, весь 360-градусный обзор делится на 72 позиции, отстоящие друг от друга на 5°, и изображение захватывается именно из этой конкретной позиции.
COIL-100 был собран Центром исследований интеллектуальных систем при факультете компьютерных наук Колумбийского университета. Это набор данных на основе изображений, состоящий из цветных изображений 100 различных мелких объектов, снятых под разными углами. Чтобы быть более точным, весь 360-градусный обзор делится на 72 позиции, отстоящие друг от друга на 5°, и изображение захватывается именно из этой конкретной позиции.
Размеры заданных изображений нормализованы для обеспечения однородности с точки зрения свойств изображения. Фон каждого изображения черный, а набор объектов имеет множество сложных геометрических характеристик и характеристик отражения. Несмотря на то, что этот набор данных был создан для определения углового положения изображения, мы используем тот же набор изображений, чтобы попытаться воссоздать 360-градусный объект.
На рис. 3 показаны различные классы, присутствующие в наборе данных COIL-100. Есть 100 различных объектов, которые являются частью набора данных.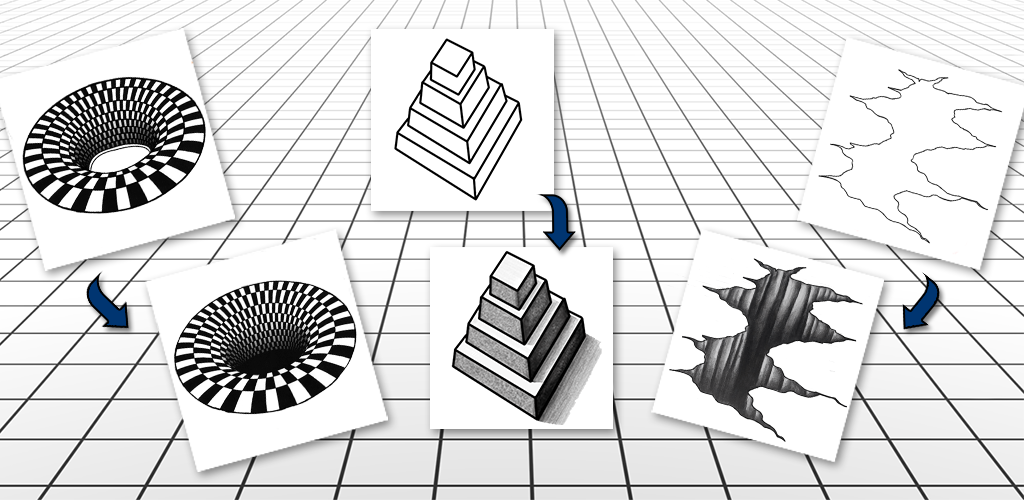 Эти объекты используются в нашем исследовании для целей репликации.
Эти объекты используются в нашем исследовании для целей репликации.
На рис. 4 показано, как каждый объект снимается под разными углами. Для каждого объекта все эти изображения берутся и обрабатываются для создания моделей, которые визуально похожи.
3.2. Показатели тестирования и оценки
Критерии окончательного проектирования определяют подход к сравнению результатов с входным изображением. Набор данных COIL-100 предоставляет изображения различных объектов, снятые под разными углами. Следовательно, смоделированные выходные данные можно было визуально сравнить с входным набором данных изображения и результатом. Не существует определенных механизмов для сравнения изображений и моделей. Поэтому возможно только визуальное сравнение моделей и набора входных изображений. В этой статье мы даем пошаговый процесс четырех случайно выбранных различных объектов из набора данных COIL-100.
4. Предлагаемая система
Обзор литературы, сделанный в предыдущем разделе, показал нам несколько подходов, которые практикуются в настоящее время для создания трехмерных карт для пары или более изображений. Предлагаемая система представлена на рис. 5. Поскольку нашей основной целью является предоставление путей (или векторов) в конце результата, мы не можем выполнять объемную реконструкцию или реконструкцию на основе вокселей. Наш подход не имеет целевой модели; следовательно, у нас нет возможности использовать какой-либо тип нейронных сетей, даже если они хорошо дают прогнозирующие результаты. С учетом приведенных выше заявлений предлагается общая структура, показанная на рисунке 5.9.0003
Предлагаемая система представлена на рис. 5. Поскольку нашей основной целью является предоставление путей (или векторов) в конце результата, мы не можем выполнять объемную реконструкцию или реконструкцию на основе вокселей. Наш подход не имеет целевой модели; следовательно, у нас нет возможности использовать какой-либо тип нейронных сетей, даже если они хорошо дают прогнозирующие результаты. С учетом приведенных выше заявлений предлагается общая структура, показанная на рисунке 5.9.0003
Наша проблема не может быть отнесена к категории простого метода триангуляции или метода связывания изображений, поскольку у нас есть ряд изображений и входных данных. Следовательно, особенности, присутствующие в каждом изображении, играют важную роль в части реконструкции.
4.1. Шаги предлагаемой системы
Шаги, которые являются частью предлагаемой системы, объясняются простыми словами в следующих подразделах. Весь процесс подразделяется на две части: процесс оценки и процесс регенерации. Алгоритм, обсуждаемый в следующем разделе, поддерживает следующие этапы процесса реконструкции: Шаг 1 . Подготовка последовательности входных изображений: для каждого объекта в качестве входных данных системы берется серия из 72 изображений. Любая объектная часть набора данных COIL-100 будет входной. Шаг 2. Классификация изображений. Насколько нам известно, существуют два типа изображений, такие как Тип A и Тип B , как упоминалось во введении. Подходы для типов A и B различны; следовательно, мы должны отнести их к любому из типов. Шаги заключаются в удалении фона, извлечении дескрипторов краев и поиске дисперсии краевых признаков. Если дисперсия выше порога T , то объект относится к типу B ; иначе А . Если объект однородной формы (тип А), это означает, что края объекта не будут высокими. Шаг 3 . Удаление текстуры. Как правило, объекты имеют собственную форму внешней границы, которая в этой статье называется «контуром» объекта.
Алгоритм, обсуждаемый в следующем разделе, поддерживает следующие этапы процесса реконструкции: Шаг 1 . Подготовка последовательности входных изображений: для каждого объекта в качестве входных данных системы берется серия из 72 изображений. Любая объектная часть набора данных COIL-100 будет входной. Шаг 2. Классификация изображений. Насколько нам известно, существуют два типа изображений, такие как Тип A и Тип B , как упоминалось во введении. Подходы для типов A и B различны; следовательно, мы должны отнести их к любому из типов. Шаги заключаются в удалении фона, извлечении дескрипторов краев и поиске дисперсии краевых признаков. Если дисперсия выше порога T , то объект относится к типу B ; иначе А . Если объект однородной формы (тип А), это означает, что края объекта не будут высокими. Шаг 3 . Удаление текстуры. Как правило, объекты имеют собственную форму внешней границы, которая в этой статье называется «контуром» объекта. Предлагаемая система способна извлекать и реконструировать то же самое. Процесс реконструкции требует точных ребер на входе. Если у каких-либо объектов есть какие-то текстуры, рисунки или разница контраста в теле, важно удалить эти низкоуровневые функции. Любое изменение текстуры может действовать как край объекта для предлагаемого алгоритма регенерации. Это может привести к перенастройке системы. Этот шаг состоит из объединения процессов обнаружения краев и адаптивного порога. Как только небольшие края (функции низкого уровня) идентифицированы, адаптивный порог поможет заполнить область любым из бинарных цветов. Это позволяет подготовить изображение объекта к определению его внешних границ. Шаг 4 . Определение границ объекта: этот шаг играет ключевую роль во всем процессе. Для объектов, относящихся к типу A , процесс оценки координат заканчивается здесь, поскольку среднее значение всех границ координат сглаживается и сохраняется. Для объектов, относящихся к типу Б, создаются индивидуальные крайние граничные пути.
Предлагаемая система способна извлекать и реконструировать то же самое. Процесс реконструкции требует точных ребер на входе. Если у каких-либо объектов есть какие-то текстуры, рисунки или разница контраста в теле, важно удалить эти низкоуровневые функции. Любое изменение текстуры может действовать как край объекта для предлагаемого алгоритма регенерации. Это может привести к перенастройке системы. Этот шаг состоит из объединения процессов обнаружения краев и адаптивного порога. Как только небольшие края (функции низкого уровня) идентифицированы, адаптивный порог поможет заполнить область любым из бинарных цветов. Это позволяет подготовить изображение объекта к определению его внешних границ. Шаг 4 . Определение границ объекта: этот шаг играет ключевую роль во всем процессе. Для объектов, относящихся к типу A , процесс оценки координат заканчивается здесь, поскольку среднее значение всех границ координат сглаживается и сохраняется. Для объектов, относящихся к типу Б, создаются индивидуальные крайние граничные пути.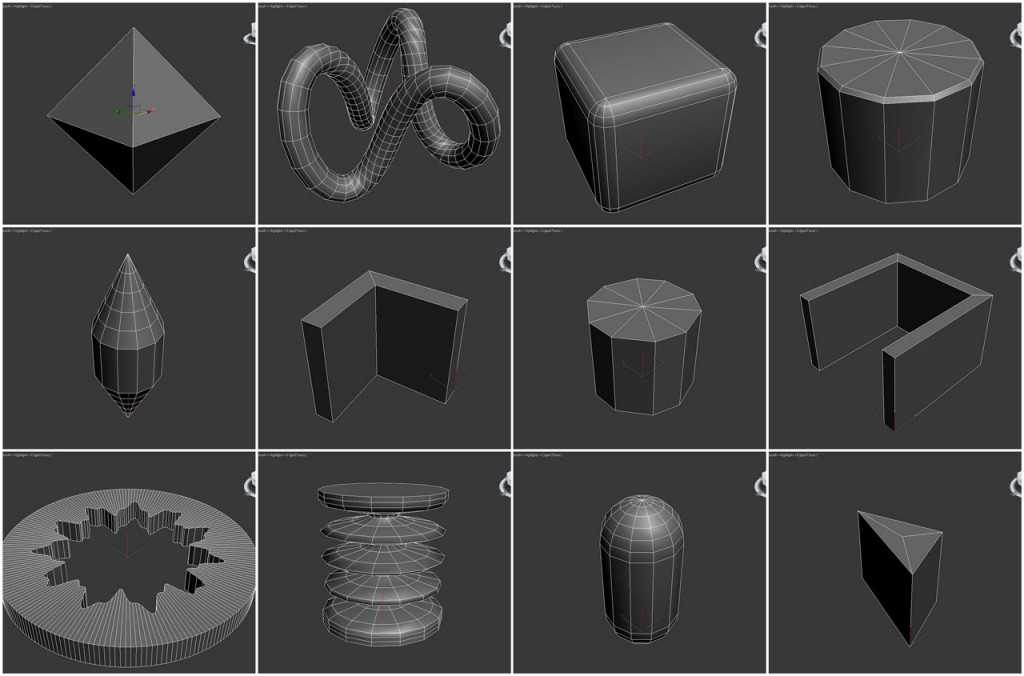 Крайний левый и крайний правый крайние значения определяют величину расстояния пары точек. Когда мы используем все изображения данного объекта, то пусть . Для изображения вышеупомянутые экскременты определяют и точки данных, соответственно, как показано на рисунке 6. Сгенерированные значения сохраняются как новая запись в матрице (3 x 72). Шаг 5. Генерация координат края из границ объекта: На этом шаге завершается формирование формы объекта. Мы предполагаем, что сгенерированные ребра имеют хорошую точность. На основе извлеченных признаков на предыдущем шаге мы определяем границы и форму всего объекта. Для этого мы используем региональный процесс связывания ребер, который предполагает, что реберные точки определены правильно и в порядке. Поскольку у нас есть границы объекта для каждого изображения, процесс связывания ребер повторяется для этих изображений. Мы предполагаем, что контур выпуклого объекта всегда будет замкнутым многоугольником. Для каждого изображения края будут представлены через массив двумерных значений следующим образом: .
Крайний левый и крайний правый крайние значения определяют величину расстояния пары точек. Когда мы используем все изображения данного объекта, то пусть . Для изображения вышеупомянутые экскременты определяют и точки данных, соответственно, как показано на рисунке 6. Сгенерированные значения сохраняются как новая запись в матрице (3 x 72). Шаг 5. Генерация координат края из границ объекта: На этом шаге завершается формирование формы объекта. Мы предполагаем, что сгенерированные ребра имеют хорошую точность. На основе извлеченных признаков на предыдущем шаге мы определяем границы и форму всего объекта. Для этого мы используем региональный процесс связывания ребер, который предполагает, что реберные точки определены правильно и в порядке. Поскольку у нас есть границы объекта для каждого изображения, процесс связывания ребер повторяется для этих изображений. Мы предполагаем, что контур выпуклого объекта всегда будет замкнутым многоугольником. Для каждого изображения края будут представлены через массив двумерных значений следующим образом: .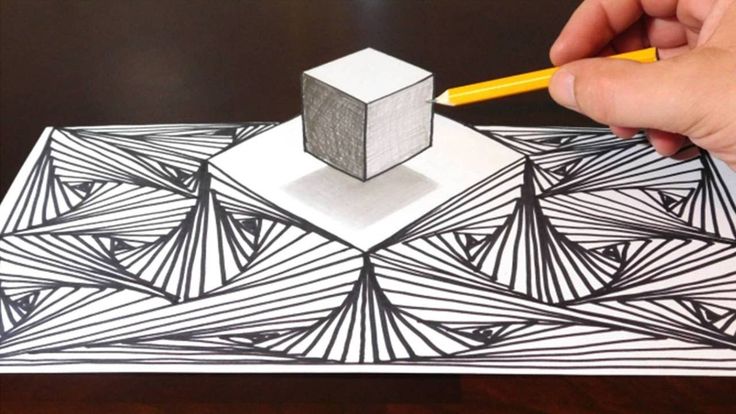 Шаг 6. Представление признаков всех изображений: В соответствии с нашей целью мы должны математически представить наши координаты в виде векторов. После этого шага качество изображений резко повышается, так как сгенерированная матрица нормализуется, значения сглаживаются и преобразуются в виде путей. Шаг 7 . Объединение функций и преобразование ребер в математические пути: это самый важный шаг в процессе реконструкции. Нормализованная входная матрица преобразуется в представления изображений, чтобы найти связность. Для этого используется предложенный алгоритм. Это повторяется для всех изображений, которые смогут создать файл, открываемый в инструменте САПР. Преобразование растра в вектор поможет изменить размер нового объекта в любой степени.
Шаг 6. Представление признаков всех изображений: В соответствии с нашей целью мы должны математически представить наши координаты в виде векторов. После этого шага качество изображений резко повышается, так как сгенерированная матрица нормализуется, значения сглаживаются и преобразуются в виде путей. Шаг 7 . Объединение функций и преобразование ребер в математические пути: это самый важный шаг в процессе реконструкции. Нормализованная входная матрица преобразуется в представления изображений, чтобы найти связность. Для этого используется предложенный алгоритм. Это повторяется для всех изображений, которые смогут создать файл, открываемый в инструменте САПР. Преобразование растра в вектор поможет изменить размер нового объекта в любой степени.
4.2. Выходные изображения на разных этапах
Изображения показывают влияние наших процессов на различных этапах. Четыре объекта под четырьмя разными углами приведены ниже для облегчения понимания. Рисунки 7(a)–7(e): Набор входных изображений, удаление фона и текстуры, обнаружение краев. На рисунках 7(f)–7(h) представлены генерация краев, функции объединения и нормализация размера. Используя функции, извлеченные из приведенных выше шагов, наш алгоритм реализуется для получения приведенного ниже результата. Результат обработки показан на рисунке 8. Формы на данном изображении слегка обработаны для облегчения визуализации. Шаги 6 и 7 не могут быть визуализированы, так как на этих шагах нет выходных изображений.
На рисунках 7(f)–7(h) представлены генерация краев, функции объединения и нормализация размера. Используя функции, извлеченные из приведенных выше шагов, наш алгоритм реализуется для получения приведенного ниже результата. Результат обработки показан на рисунке 8. Формы на данном изображении слегка обработаны для облегчения визуализации. Шаги 6 и 7 не могут быть визуализированы, так как на этих шагах нет выходных изображений.
4.3. Предлагаемый алгоритм объединения изображений
Входной набор из массива изображений, снятых под разными углами (на расстоянии 5°), является входным параметром для приведенного ниже алгоритма. Между парами изображений выявляется общий признак, который затем используется для анализа глубины. Шаг 1. Пусть i и j обозначают любые изображения в множестве изображений. Эпиполи вычисляются из 2D-функций изображений i и j во входном наборе. Шаг 2 . Оценка проекционных матриц по обоим изображениям. Изображение i -го вида используется в качестве изображения с нулевой ориентацией, а проекционная матрица для i -го вида вычисляется путем реконструкции опорного кадра и эпиполя вместе с матрицей признаков изображения i -го изображения. Шаг 3 . Начальная оценка координат трехмерной точки получается путем триангуляции. Шаг 4 . Для всех оставшихся пар изображений оценка выполняется путем повторения шагов с 1 по 3. Полученный результат будет неуточненной оценкой 3D-координат для каждой пары изображений, которая будет иметь ошибку между каждым элементом в оценочном наборе результатов. Шаг 5 . Полученный набор результатов оптимизируется для уточнения координат путем сравнения. Ошибка перепроецирования каждой оцениваемой трехмерной точки уменьшается. В результате мы имеем лучшие проективные координаты изображений. Шаг 6 . Проективные координаты преобразуются в трехмерные метрические координаты в предположении истинности. Шаг 7 .
Изображение i -го вида используется в качестве изображения с нулевой ориентацией, а проекционная матрица для i -го вида вычисляется путем реконструкции опорного кадра и эпиполя вместе с матрицей признаков изображения i -го изображения. Шаг 3 . Начальная оценка координат трехмерной точки получается путем триангуляции. Шаг 4 . Для всех оставшихся пар изображений оценка выполняется путем повторения шагов с 1 по 3. Полученный результат будет неуточненной оценкой 3D-координат для каждой пары изображений, которая будет иметь ошибку между каждым элементом в оценочном наборе результатов. Шаг 5 . Полученный набор результатов оптимизируется для уточнения координат путем сравнения. Ошибка перепроецирования каждой оцениваемой трехмерной точки уменьшается. В результате мы имеем лучшие проективные координаты изображений. Шаг 6 . Проективные координаты преобразуются в трехмерные метрические координаты в предположении истинности. Шаг 7 .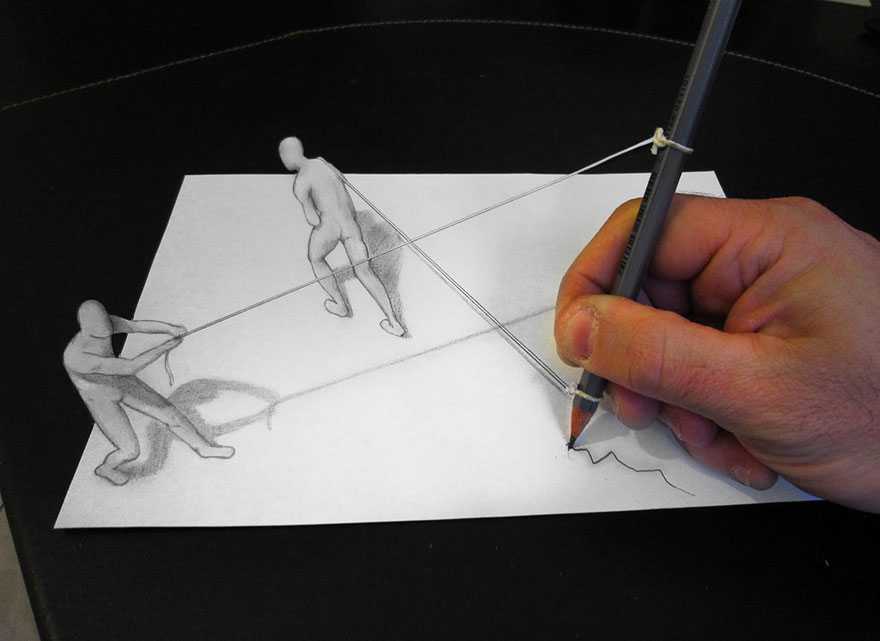 Несколько трехмерных точек триангулируются для оценки трехмерной структуры.
Несколько трехмерных точек триангулируются для оценки трехмерной структуры.
Мы могли видеть, что алгоритм работает для каждой пары изображений со сложностью, где n — количество изображений для построения признаков.
5. Наблюдения
Основным нашим требованием было создание моделей, максимально похожих на входные объекты. Сопоставление пикселей, основанное на математическом расчете мер точности, невозможно из-за несходства входных и выходных представлений. Система оценивает стабильно расположенные ограничивающие рамки 3D без дополнительных 3D-моделей.
5.1. Точность предлагаемой системы
Точность вывода зависит от количества изображений, используемых в процессе. Поскольку в наборе данных COIL-100 есть изображения очень малых размеров, изменение пути было очень большим в процессе генерации. Мы предполагаем, что больший размер изображения поможет повысить точность. Объекты Типа A имеют лучшую визуальную точность, чем изображения типа B .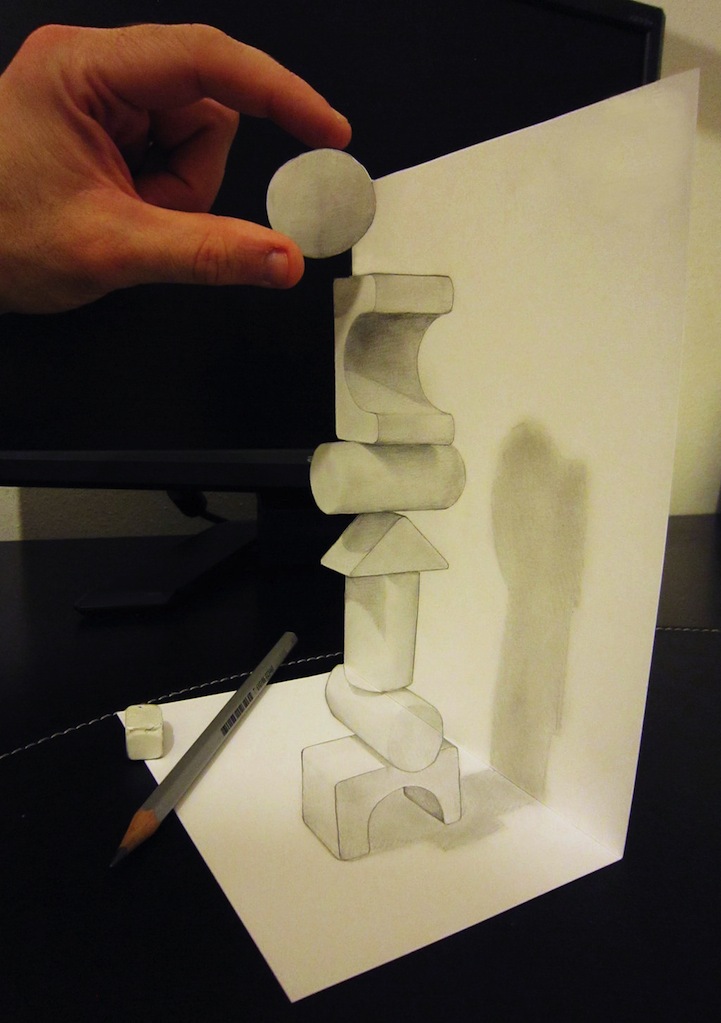
5.2. Варианты с параметрами
Единственным переменным параметром является количество изображений, рассматриваемых во входном массиве. Наши наблюдения показывают, что количество изображений прямо пропорционально точности конечного результата. В таблице 1 показано базовое сравнение качества вывода и количества используемых изображений (сравнение качества на основе количества изображений). Графическое представление сравнения качества на основе количества изображений представлено на рисунке 9..
5.3. Преимущества
Приведенные выше изображения непосредственно показывают нам визуальное сравнение ожидаемого и полученного результата. Наблюдаемые преимущества обозначены следующим образом: Ускоряется процесс автоматизированного проектирования объектов Вместо воксельных или объемных выходных данных создаются векторные траектории Обсуждаемый алгоритм носит универсальный характер Можно использовать ручные и одиночные камеры
5.4. Недостатки
Предлагая новый алгоритм для типового процесса, важно отметить отмеченные недостатки.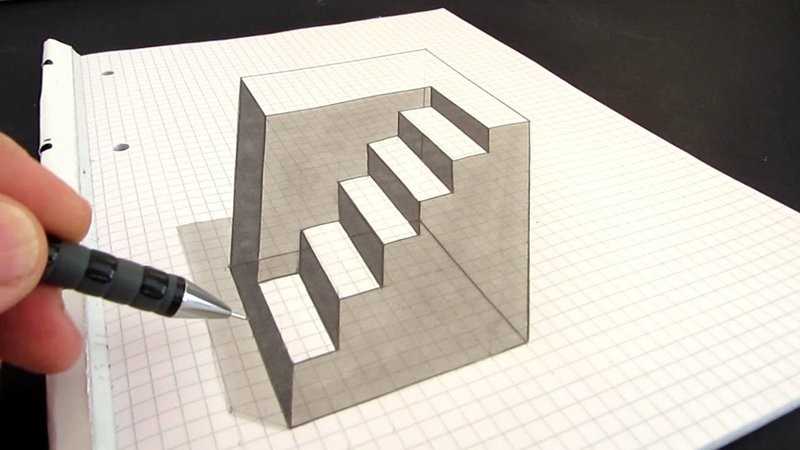 Перечисленные ниже пункты являются наиболее важными наблюдениями в отношении недостатков предлагаемой системы: Алгоритм реализован только на наборе данных COIL-100, а фон всех изображений был черным. Текстура или объем объектов отсутствуют в процессе реконструкции. Он работает только для объектов выпуклой формы, а не для пространств. Создается только предварительный контур объекта. Чтобы объектную модель можно было использовать в реальных реальных приложениях, сгенерированные формы необходимо дополнительно обработать.
Перечисленные ниже пункты являются наиболее важными наблюдениями в отношении недостатков предлагаемой системы: Алгоритм реализован только на наборе данных COIL-100, а фон всех изображений был черным. Текстура или объем объектов отсутствуют в процессе реконструкции. Он работает только для объектов выпуклой формы, а не для пространств. Создается только предварительный контур объекта. Чтобы объектную модель можно было использовать в реальных реальных приложениях, сгенерированные формы необходимо дополнительно обработать.
5.5. Future Scope
Мы считаем, что это исследование является примитивным и приведет к новой области исследований, поскольку это первая попытка автоматизировать процесс создания трехмерных объектов. Еще есть возможность реализовать то же самое с другим набором данных, поскольку у нас был одинаковый фон для всех изображений. Кроме того, генерация расширенных видов и выходных данных цветных объектов еще не достигнута. Еще одним будущим усовершенствованием может стать включение изображений, выровненных по верхнему и нижнему краю, чтобы сделать полностью вращающуюся модель.![]()
6. Заключение
В рамках большого скачка в области обработки изображений алгоритмы объемной оценки и реконструкции становятся все более популярными. В качестве примитивной попытки автоматизировать процесс реконструкции трехмерных объектов мы можем предложить основу для нашего исследования. Несмотря на то, что мы не смогли сделать полный вывод модели с возможностью вращения по трем осям из-за отсутствия таких изображений в наборе данных, используя серию изображений, мы смогли воспроизвести примитивную форму и особенности входных объектов. Предлагаемая система может заменить ручные процессы проектирования хотя бы на начальных этапах. Можно сделать вывод, что получение трехмерных моделей возможно при задании набора изображений вокруг объекта.
Доступность данных
Данные, использованные для поддержки результатов этого исследования, находятся в свободном доступе по адресу https://www.cs.columbia.edu/CAVE/software/softlib/coil-100.php.
Раскрытие информации
Спонсор не участвовал в разработке исследования; при сборе, анализе или интерпретации данных; в написании рукописи или в решении опубликовать результаты.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Авторы хотели бы поблагодарить за поддержку исследователей Таифского университета, поддерживающих проект номер TURSP-2020/211, Таифский университет, Таиф, Саудовская Аравия.
Ссылки
А. Гуха, Д. Саманта, А. Банерджи и Д. Агарвал, «Модель глубокого обучения для предотвращения потери информации из многостраничных цифровых документов», IEEE Access , vol. 9, нет. 1–1, 2021.
Посмотреть по адресу:
Сайт издателя | Академия Google
А.К. Бисвал, Д. Сингх, Б.К. Паттанаяк, Д. Саманта и М.-Х. Ян, «Интеллектуальная система оповещения на основе IoT для обнаружения сонливых водителей», Wireless Communications and Mobile Computing , vol. 2021, стр. 1–13, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
M.
Maheswari, S. Geetha, S.S. Kumar, M. Karuppiah, D. Samanta и Y. Park, «PEVRM: вероятностно-эволюционная модель рекомендации версий для мобильных приложений», Доступ IEEE , том. 9, стр. 20819–20827, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
P. Szwargulski, M. Möddel, N. Gdaniec и T. Knopp, «Эффективная совместная реконструкция изображения данных с несколькими патчами с повторным использованием единой системной матрицы в визуализации магнитных частиц», IEEE Transactions on Medical Imaging. , том. 38, нет. 4, стр. 932–944, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
I. Oksuz, JR Clough, B. Ruijsink et al., «Обнаружение и коррекция артефактов движения сердца на основе глубокого обучения во время реконструкции для высококачественной сегментации», IEEE Transactions on Medical Imaging , vol.
39, нет. 12, стр. 4001–4010, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
К. Цинь, Дж. Шлемпер, Дж. Кабальеро, А. Н. Прайс, Дж. В. Хайнал и Д. Рюкерт, «Сверточные рекуррентные нейронные сети для динамической реконструкции МР-изображений», IEEE Transactions on Medical Imaging , vol. . 38, нет. 1, стр. 280–290, 2019.
Посмотреть по адресу:
Сайт издателя | Академия Google
М. А. Белзунсе, А. Мехранян и А. Дж. Ридер, «Улучшение коррекции частичного объема при реконструкции изображения домашних животных под контролем МРТ с использованием размеров вокселя МРТ», IEEE Transactions on Radiation and Plasma Medical Sciences , vol. 3, нет. 3, стр. 315–326, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
M.
Boberg, T. Knopp, P. Szwargulski и M. Möddel, «Обобщенная реконструкция нескольких патчей mpi с использованием кластеров подобных системных матриц», IEEE Transactions on Medical Imaging , vol. 39, нет. 5, стр. 1347–1358, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Рана, Р. Хэмпсон и Г. Доби, «Рак груди: реконструкция модели и регистрация изображения на основе сегментированного деформированного изображения с использованием визуального и силового анализа», IEEE Transactions on Medical Imaging , vol. 39, нет. 5, стр. 1295–1305, 2020.
Посмотреть по адресу:
Сайт издателя | Академия Google
Ю. Ли и Г.-Х. Чен, «Метод реконструкции КТ-изображения, управляемый метрикой несоответствия эмпирических данных (тусклых)», IEEE Transactions on Medical Imaging , vol.
38, нет. 2, стр. 337–348, 2019.Посмотреть по адресу:
Сайт издателя | Google Scholar
З. Ху, Х. Сюэ, К. Чжан и др., «Dpir-net: прямая реконструкция изображения домашних животных на основе генеративно-состязательной сети Вассерштейна», IEEE Transactions on Radiation and Plasma Medical Sciences , том. 5, нет. 1, стр. 35–43, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Х. Ци, Н. Фуин, Г. Круз и др., «Нежесткая оценка дыхательных движений на МРТ-изображениях коронарных артерий всего сердца с использованием неконтролируемого глубокого обучения», IEEE Transactions on Medical Imaging , vol. . 40, нет. 1, стр. 444–454, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Z.
Shen, C. Gong, W. Yu и L. Zeng, «Управляемая реконструкция с фильтрацией изображений на основе полной вариации и предшествующего изображения для компьютерной томографии с ограниченным углом», Доступ IEEE , том. 8, стр. 151878–151887, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю. Чен, Ю. Лу, К. Ван, М. А. Купински и М. А. Анастасио, «Рейтинг систем визуализации с учетом реконструкции с использованием числового наблюдателя, управляемого разреженностью, с использованием вариационного байесовского вывода», IEEE. Труды по медицинской визуализации , вып. 38, нет. 5, стр. 1251–1262, 2019.
Посмотреть по адресу:
Сайт издателя | Академия Google
А. Дж. Ридер, Г. Корда, А. Мехранян, К. Д. Коста-Луис, С. Эллис и Дж. А. Шнабель, «Глубокое обучение для реконструкции изображений домашних животных», IEEE Transactions on Radiation and Plasma Medical Sciences , vol.
5, нет. 1, стр. 1–25, 2021 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю. Лу, Дж. З. Чжан, К. М. Дж. Ву и З.-Н. Ли, «Обзор алгоритмов трехмерной реконструкции на основе параллакса движения», IEEE Transactions on Systems, Man and Cybernetics, Part C (Applications and Reviews) , том. 34, нет. 4, стр. 532–548, 2004 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Х. Гупта, К. Х. Джин, Х. К. Нгуен, М. Т. Макканн и М. Унсер, «Проецируемый градиентный спуск на основе Cnn для последовательной реконструкции КТ-изображений», IEEE Transactions on Medical Imaging , vol. 37, нет. 6, стр. 1440–1453, 2018.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. А. Хан, А.
Уллах, С. Хан и др., «Новый вариационный подход дробного порядка для восстановления изображений на основе нечетких степеней принадлежности», Доступ IEEE , том. 9, стр. 43574–43600, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
S. Ibrahim, H. Alhumyani, M. Masud et al., «Структура для эффективного шифрования медицинских изображений с использованием динамических s-блоков и хаотических карт», IEEE Access , vol. 8, стр. 160433–160449, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Х. Кошик, Д. Сингх, М. Каур, Х. Альшазли, А. Загуйя и Х. Хамам, «Диагностика диабетической ретинопатии по изображениям глазного дна с использованием комплексной генерализации глубоких моделей», Доступ IEEE , том. 1, 2021.
Посмотреть по адресу:
Сайт издателя | Google Scholar
В.
Кумар, Д. Кумар, М. Каур, Д. Сингх, С. А. Идрис и Х. Альшазли, «Новый оптимизатор двоичной чайки и его приложение к проблеме выбора функций», IEEE Access , об. 9, стр. 103481–103496, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
Э. Брахманн, А. Крулл, Ф. Мишель, С. Гамхольд, Дж. Шоттон и К. Ротер, «Изучение оценки позы 6D-объекта с использованием координат 3D-объекта», в Материалы 13-й Европейской конференции по компьютерному зрению , стр. 536–551, Цюрих, Швейцария, сентябрь 2014 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
D. Aguileraa and JG Lahoza, Sv 3 Dvision: 3D Reconstruction and Visualization from a Single View , International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Венеция, Италия, 2005.
Мусабаев Р.
Р., Калимолдаев М.Н., Амиргалиев Ю.Н., Таирова А.Т., Мусабаев Т.Р. Вычисление трехмерных координат точки на основе стереоскопической системы. Открытое машиностроение , том. 8, нет. 1, стр. 109–117, 2018 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Соуза, Ю. Боферрис, В. Лоос, Р. М. Лебель и Р. Фрейн, «Усовершенствованная реконструкция магнитно-резонансных изображений на основе глубокого обучения с использованием предшествующей предметной визуализации мозга: доказательство». концепция с использованием когорты предполагаемых нормальных субъектов», IEEE Journal of Selected Topics in Signal Processing , vol. 14, нет. 6, стр. 1126–1136, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
А. Ю. Мулайим, У. Йилмаз и В. Аталай, «Реконструкция трехмерной модели на основе силуэта из нескольких изображений», IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics) , vol.
. 33, нет. 4, стр. 582–591, 2003 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. Шлемпер, Дж. Кабальеро, Дж. В. Хайнал, А. Н. Прайс и Д. Рюкерт, «Глубокий каскад сверточных нейронных сетей для динамической реконструкции МР-изображений», IEEE Transactions on Medical Imaging , vol. 37, нет. 2, стр. 491–503, 2018 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
X.-F. Хан, Х. Лага и М. Беннамун, «Реконструкция трехмерных объектов на основе изображений: современное состояние и тенденции в эпоху глубокого обучения», IEEE Transactions on Pattern Analysis and Machine Intelligence , vol. 43, нет. 5, стр. 1578–1604, 2021.
Посмотреть по адресу:
Сайт издателя | Академия Google
Дж.
Гвак, С. Б. Чой, А. Гарг, М. Чандракер и С. Саварезе, «Трехмерная реконструкция со слабым контролем с ограничением состязательности», в Трудах конференции 2017 г. по компьютерному зрению и распознаванию образов , Гонолулу, Гавайи, США, июль 2017 г.Посмотреть по адресу:
Google Scholar
А. Мехранян, М. А. Белзунце, К. Прието, А. Хаммерс и А. Дж. Ридер, регуляризация разреженности», IEEE Transactions on Medical Imaging , vol. 37, нет. 1, стр. 20–34, 2018 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Штрауб и В. Шульц, «Совместная реконструкция распределения трассеров и фона в визуализации магнитных частиц», IEEE Transactions on Medical Imaging , vol. 37, нет. 5, стр. 1192–1203, 2018.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С.
Курт, Ю. Муслу и Э. У. Саритас, «Частичное изображение центра поля зрения (pci): надежная реконструкция изображения в x-пространстве для визуализации магнитных частиц», IEEE Transactions on Medical Imaging , vol. 39, нет. 11, стр. 3441–3450, 2020.Посмотреть по адресу:
Сайт издателя | Google Scholar
Колумбийская библиотека изображений объектов (COIL-100) Набор данных.
Г. Каур, К. С. Саини, Д. Сингх и М. Каур, «Всестороннее исследование вычислительных методов панорамирования для изображений дистанционного зондирования», Archives Computational Methods in Engineering , vol. 28, 2021.
Посмотреть по адресу:
Google Scholar
R. M. S. Priya, S. L. Aarthy, C. Gunavathi, P. Venkatesh, S. Koppu и X. Z. Gao, «3D-реконструкция сцены из нескольких 2D-изображений», International Journal of Civil Engineering & Technology , том.
8, стр. 324–331, 2017.Посмотреть по адресу:
Google Scholar
 Maheswari, S. Geetha, S.S. Kumar, M. Karuppiah, D. Samanta и Y. Park, «PEVRM: вероятностно-эволюционная модель рекомендации версий для мобильных приложений», Доступ IEEE , том. 9, стр. 20819–20827, 2021.
Maheswari, S. Geetha, S.S. Kumar, M. Karuppiah, D. Samanta и Y. Park, «PEVRM: вероятностно-эволюционная модель рекомендации версий для мобильных приложений», Доступ IEEE , том. 9, стр. 20819–20827, 2021.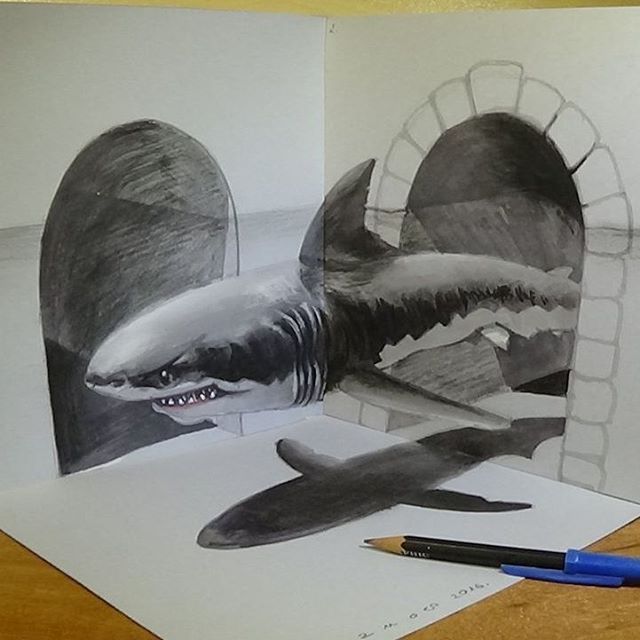 39, нет. 12, стр. 4001–4010, 2020.
39, нет. 12, стр. 4001–4010, 2020.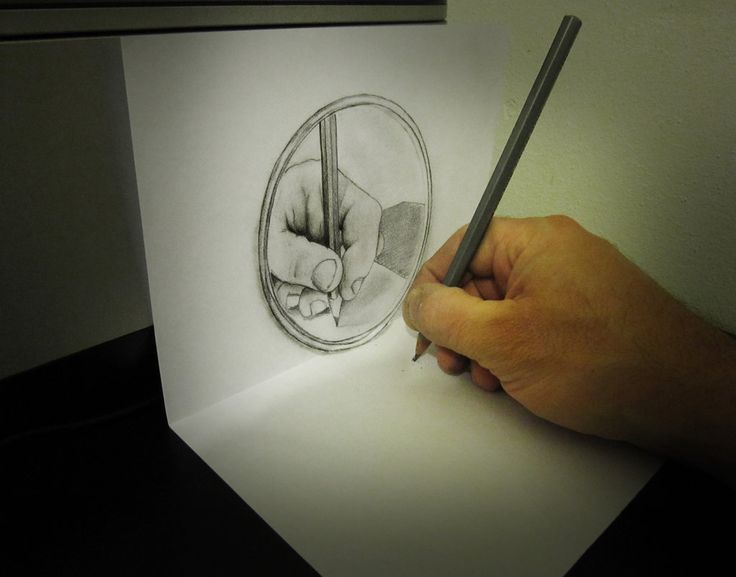 Boberg, T. Knopp, P. Szwargulski и M. Möddel, «Обобщенная реконструкция нескольких патчей mpi с использованием кластеров подобных системных матриц», IEEE Transactions on Medical Imaging , vol. 39, нет. 5, стр. 1347–1358, 2020.
Boberg, T. Knopp, P. Szwargulski и M. Möddel, «Обобщенная реконструкция нескольких патчей mpi с использованием кластеров подобных системных матриц», IEEE Transactions on Medical Imaging , vol. 39, нет. 5, стр. 1347–1358, 2020.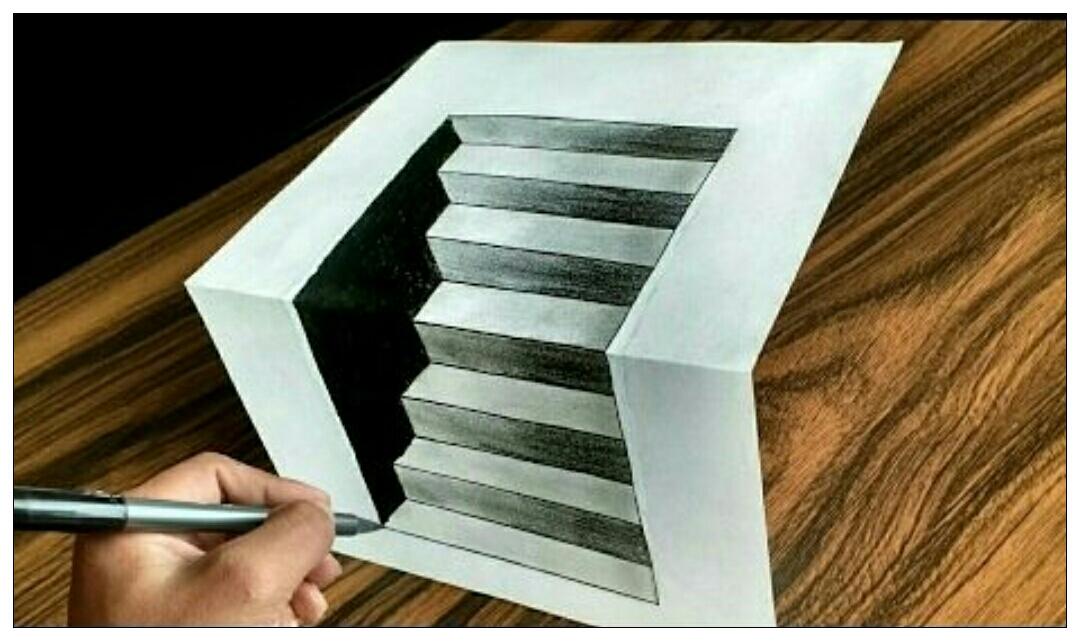 38, нет. 2, стр. 337–348, 2019.
38, нет. 2, стр. 337–348, 2019. Shen, C. Gong, W. Yu и L. Zeng, «Управляемая реконструкция с фильтрацией изображений на основе полной вариации и предшествующего изображения для компьютерной томографии с ограниченным углом», Доступ IEEE , том. 8, стр. 151878–151887, 2020.
Shen, C. Gong, W. Yu и L. Zeng, «Управляемая реконструкция с фильтрацией изображений на основе полной вариации и предшествующего изображения для компьютерной томографии с ограниченным углом», Доступ IEEE , том. 8, стр. 151878–151887, 2020.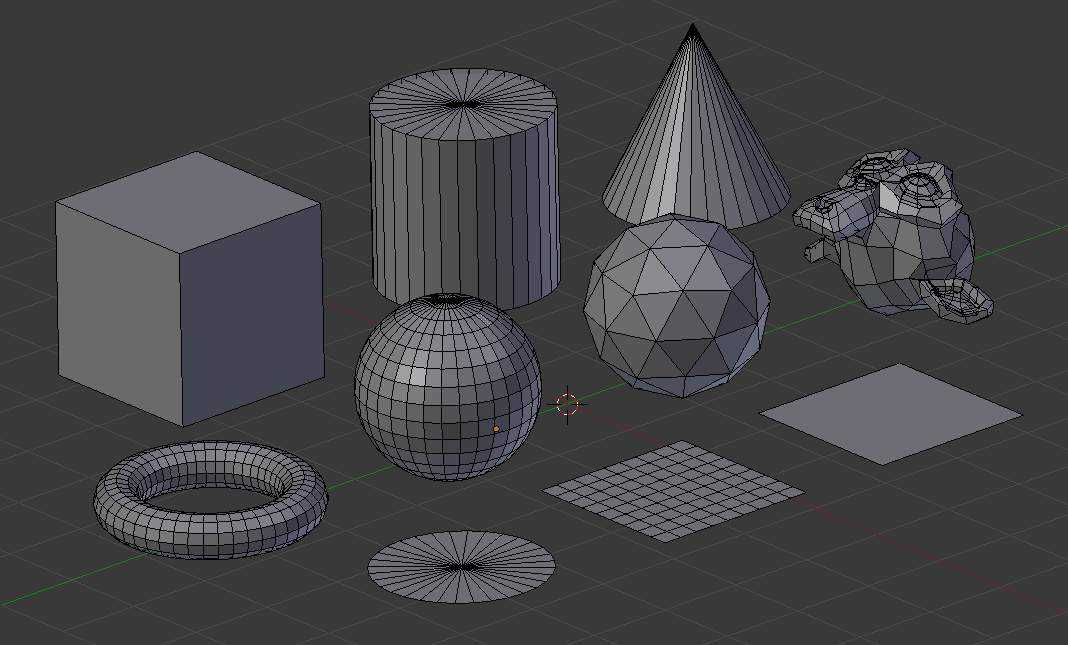 5, нет. 1, стр. 1–25, 2021 г.
5, нет. 1, стр. 1–25, 2021 г.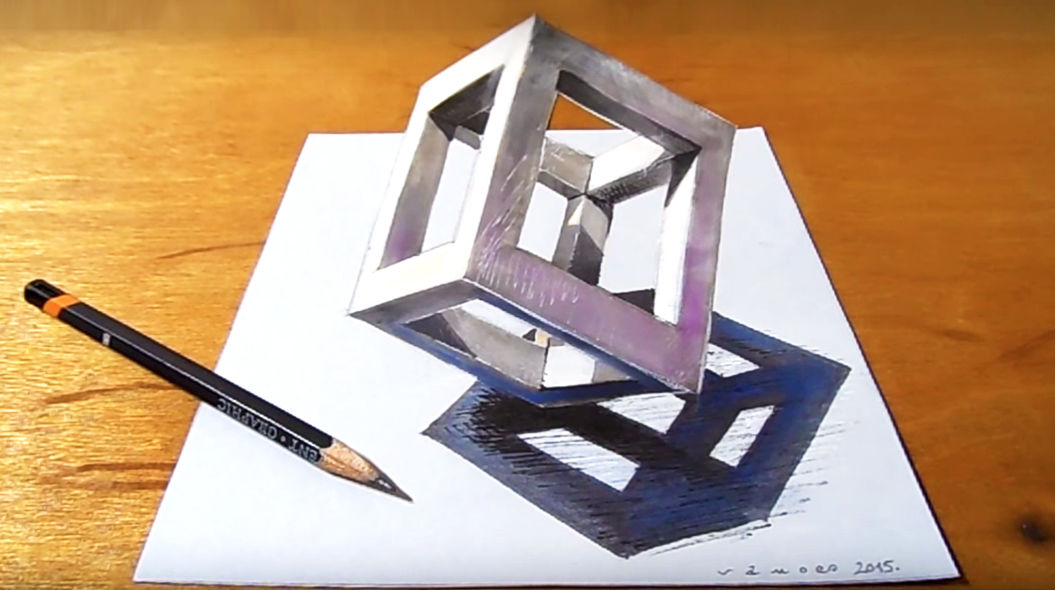 Уллах, С. Хан и др., «Новый вариационный подход дробного порядка для восстановления изображений на основе нечетких степеней принадлежности», Доступ IEEE , том. 9, стр. 43574–43600, 2021.
Уллах, С. Хан и др., «Новый вариационный подход дробного порядка для восстановления изображений на основе нечетких степеней принадлежности», Доступ IEEE , том. 9, стр. 43574–43600, 2021.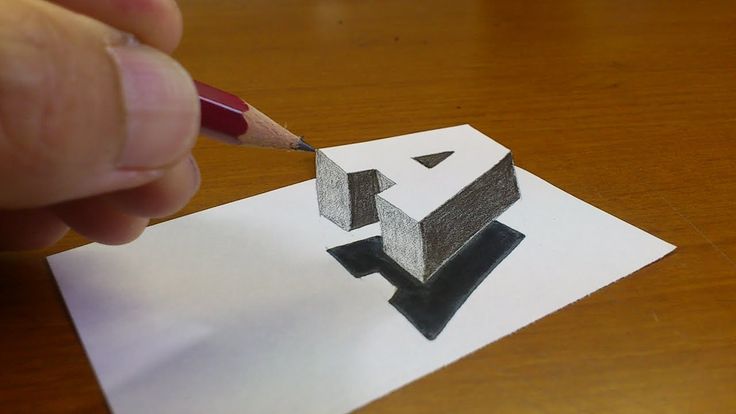 Кумар, Д. Кумар, М. Каур, Д. Сингх, С. А. Идрис и Х. Альшазли, «Новый оптимизатор двоичной чайки и его приложение к проблеме выбора функций», IEEE Access , об. 9, стр. 103481–103496, 2021.
Кумар, Д. Кумар, М. Каур, Д. Сингх, С. А. Идрис и Х. Альшазли, «Новый оптимизатор двоичной чайки и его приложение к проблеме выбора функций», IEEE Access , об. 9, стр. 103481–103496, 2021. Р., Калимолдаев М.Н., Амиргалиев Ю.Н., Таирова А.Т., Мусабаев Т.Р. Вычисление трехмерных координат точки на основе стереоскопической системы. Открытое машиностроение , том. 8, нет. 1, стр. 109–117, 2018 г.
Р., Калимолдаев М.Н., Амиргалиев Ю.Н., Таирова А.Т., Мусабаев Т.Р. Вычисление трехмерных координат точки на основе стереоскопической системы. Открытое машиностроение , том. 8, нет. 1, стр. 109–117, 2018 г. . 33, нет. 4, стр. 582–591, 2003 г.
. 33, нет. 4, стр. 582–591, 2003 г.Copyright
Copyright © 2021 Naived George Eapen et al. Эта статья находится в открытом доступе и распространяется в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Методы трехмерной визуализации: обзор литературы
1. Webber RL, Horton RA, Tyndall DA, Ludlow JB. Компьютерная томография с настроенной апертурой (ТАКТ). Теория и применение трехмерной денто-альвеолярной визуализации. Дентомаксиллофак Радиол. 1997; 26: 53–62. [PubMed] [Google Scholar]
2. Укар Ф.И., Секерчи А.Е., Уйсал Т., Бенги А.О. Стандартизация записей в ортодонтии. Часть 2: Методы черепно-лицевой визуализации. Турецкий журнал ортодонтии. 2012;25:167–87. [Академия Google]
3. Хаджир М.Ю., Миллетт Д.Т., Аюб А.Ф., Зиберт Дж.П. Применение 3D-визуализации в ортодонтии: Часть 1. J Orthod. 2004; 31: 62–70. [PubMed] [Google Scholar]
4. Plooij JM, Maal TJ, Haers P, Borstlap WA, Kuijpers-Jagtman AM, Bergé SJ. Процессы слияния цифровых трехмерных изображений для планирования и оценки ортодонтии и ортогнатической хирургии. Систематический обзор. Int J Oral Maxillofac Surg. 2011;40:341–52. [PubMed] [Google Scholar]
5. Мавили М.Э., Кантер Х.И., Саглам-Айдинатай Б., Камачи С., Кокадэрели И. Использование методов трехмерного медицинского моделирования для точного планирования ортогнатической хирургии. J Craniofac Surg. 2007; 18:740–7. [PubMed] [Академия Google]
6. Карадениз Э.И., Гонсалес С., Элекдаг-Турк С., Исчи Д., Шахин-Саглам А.М., Алкис Х. и соавт. Влияние фтора на ортодонтическое движение зубов у людей. Двух- и трехмерная оценка. Ауст Ортод Дж. 2011; 27:94–101. [PubMed] [Google Scholar]
7. Андресен В. Три вклада в ортодонтическую диагностику. Международный журнал ортодонтии, челюстно-лицевой хирургии и рентгенографии. 1926; 12: 235–51. [Google Scholar]
8. Ван Лун Дж. Новый метод определения нормального и аномального отношения зубов к линиям лица. Стоматологический Космос. 1915;57:1093–101. [Google Scholar]
9. Шварц Р. Новый цефалометрический метод и аппарат и их применение в ортодонтии. Int J Orthod Oral Surg Radiol. 1925; 11: 989–1017. [Google Scholar]
10. Герман Г.Т. 2-е изд. Нью-Йорк: Спрингер; 2009. Основы компьютерной томографии: реконструкция изображения из проекции; стр. 1–17. [Google Scholar]
11. Scarfe WC, Farman AG, Sukovic P. Клинические применения конусно-лучевой компьютерной томографии в стоматологической практике. J Can Dent Assoc. 2006; 72: 75–80. [PubMed] [Академия Google]
12. Ритман Э.Л. Микрокомпьютерная томография – современное состояние и разработки. Анну Рев Биомед Инж. 2004; 6: 185–208. [PubMed] [Google Scholar]
13. Паддок С.В., Элисейри К.В. Лазерная сканирующая конфокальная микроскопия: история, приложения и связанные с ними методы оптического секционирования. Методы Мол Биол. 2014; 1075:9–47. [PubMed] [Google Scholar]
14. Fechteler P, Eisert P, Rurainsky J. Быстрое трехмерное сканирование лица с высоким разрешением. (III-4).ICIP. 2007; 3: III–81. [Академия Google]
15. Ras F, Habets LL, van Ginkel FC, Prahl-Andersen B. Количественная оценка морфологии лица с использованием стереофотограмметрии — демонстрация новой концепции. Джей Дент. 1996; 24: 369–74. [PubMed] [Google Scholar]
16. Ferrario VF, Sforza C, Poggio CE, Serrao G. Трехмерная морфометрия лица. Am J Orthod Dentofacial Orthop. 1996; 109: 86–93. [PubMed] [Google Scholar]
17. Эдельман Р.Р., Хесселинк Дж., Златкин М. Сондерс; 2005. Клиническая магнитно-резонансная томография: набор из 3-х томов. [Академия Google]
18. Бродбент Б.Х. Новая рентгенологическая техника и ее применение в ортодонтии. Угол Ортод. 1931; 1: 45–66. [Google Scholar]
19. Афанасиу А.Е. Лондон: Мосби-Вулф; 1997. Ортодонтическая цефалометрия; стр. 241–92. [Google Scholar]
20. Nalçaci R, Ozturk F, Sökücü O. Сравнение двухмерной рентгенографии и трехмерной компьютерной томографии в угловых цефалометрических измерениях. Дентомаксиллофак Радиол. 2010;39:100–6. [Бесплатная статья PMC] [PubMed] [Google Scholar]
21. Берк П.Х., Борода Ф.Х. Стереофотограмметрия лица: предварительное исследование точности упрощенной системы, разработанной для картографирования контуров с помощью фотографии. Эм Джей Ортод. 1967; 53: 769–82. [PubMed] [Google Scholar]
22. Баумринд С. На пути к общей модели клинических черепно-лицевых исследований. В: Хантер В.С., Карлсон Д.С., редакторы. Эссе в честь Роберта Мойерса. Анн-Арбор: Мичиганский университет; 1991. [Google Scholar]
23. Han UK, Vig KW, Weintraub JA, Vig PS, Kowalski CJ. Согласованность решений об ортодонтическом лечении с диагностическими записями. Am J Orthod Dentofacial Orthop. 1991;100:212–9. [PubMed] [Google Scholar]
24. Hixon EH. Понятие нормы и цефалометрия. Эм Джей Ортод. 1956; 42: 898–906. [Google Scholar]
25. Moyers RE, Bookstein FL. Неуместность традиционной цефалометрии. Эм Джей Ортод. 1979; 75: 599–617. [PubMed] [Google Scholar]
26. Baumrind S, Frantz RC. Надежность измерений пленки головы: 1. Идентификация ориентиров. Эм Джей Ортод. 1971; 60: 111–27. [PubMed] [Google Scholar]
27. Виг PS. Текущие споры в ортодонтии. Чикаго: Издательство Quintessence; 1991. Ортодонтические споры: их происхождение, последствия и разрешение; стр. 269–310. [Google Scholar]
28. Грон П. Геометрическая оценка размера изображения в рентгенографии зубов. Джей Дент Рез. 1960; 39: 289–301. [PubMed] [Google Scholar]
29. Сингх И.Дж., Савара Б.С. Нормы размеров и годовые приросты семи анатомических мер верхней челюсти у девочек от трех до шестнадцати лет. Угол Ортод. 1966; 36: 312–24. [PubMed] [Google Scholar]
30. Дин Д., Ханс М.Г., Букштейн Ф.Л., Субраманян К. Ориентировочные данные трехмерного исследования роста с помощью кисти Болтона: онтогенез и половой диморфизм когорты стандартов Болтона. Расщелина неба Craniofac J. 2000;37:145–56. [PubMed] [Академия Google]
31. Субраманян К., Дин Д. Сканированные биортогональные рентгенограммы как источник трехмерных цефалометрических данных. ШПАЙ. 1996; 34: 717–24. [Google Scholar]
32. Удупа Дж.К., Герман Г.Т. Бока-Ратон: CRC Press; 1991. Трехмерная визуализация в медицине. [Google Scholar]
33. Абудара К.А., Хэтчер Д., Нильсен И.Л., Миллер А. Трехмерная оценка верхних дыхательных путей у подростков. Ортод Краниофак Рез. 2003; 6 (Приложение 1): 173–5. [PubMed] [Google Scholar]
34. Рабинов К., Келл Т. мл., Гордон П. Х. КТ слюнных желез. Радиол Клин Норт Ам. 1984;22:145–59. [PubMed] [Google Scholar]
35. Westesson PL, Katzberg RW, Tallents RH, Sanchez-Woodworth RE, Svensson SA. КТ и МРТ височно-нижнечелюстного сустава: сравнение с аутопсийными препаратами. AJR Am J Рентгенол. 1987; 148:1165–71. [PubMed] [Google Scholar]
36. Bolger WE, Butzin CA, Parsons DS. Костные анатомические вариации придаточных пазух носа и аномалии слизистой оболочки: КТ-анализ для эндоскопической хирургии пазух. Ларингоскоп. 1991; 101: 56–64. [PubMed] [Google Scholar]
37. Зилха А. Компьютерная томография при травмах лица. Радиология. 1982;144:545–8. [PubMed] [Google Scholar]
38. Görgülü S, Gokce SM, Olmez H, Sagdic D, Ors F. Изменения объема носовой полости после быстрого расширения верхней челюсти у подростков, оцененные с помощью трехмерного моделирования и программ моделирования. Am J Orthod Dentofacial Orthop. 2011;140:633–40. [PubMed] [Google Scholar]
39. Ito K, Gomi Y, Sato S, Arai Y, Shinoda K. Клиническое применение новой компактной компьютерной томографии для оценки трехмерных изображений для предоперационного планирования лечения имплантатов в боковом отделе. отчет о болезни. Clin Oral Implants Res. 2001;12:539–42. [PubMed] [Google Scholar]
40. Harorli A, Akgul M, Dagistan S. Ataturk University Press; 2006. Радиология в стоматологии. [Google Scholar]
41. Халазонетис Д.Дж. От двухмерных цефалограмм до трехмерных компьютерных томографов. Am J Orthod Dentofacial Orthop. 2005; 127: 627–37. [PubMed] [Google Scholar]
42. Kau CH, Richmond S, Palomo JM, Hans MG. Трехмерная конусно-лучевая компьютерная томография в ортодонтии. Дж Ортод. 2005; 32: 282–93. [PubMed] [Академия Google]
43. Белый СК. Конусно-лучевая визуализация в стоматологии. Здоровье физ. 2008; 95: 628–37. [PubMed] [Google Scholar]
44. Циклакис К., Донта С., Гавала С., Караянни К., Каменопулу В., Хурдакис С.Дж. Снижение дозы при визуализации челюстно-лицевой области с помощью низкодозовой конусно-лучевой КТ. Евр Дж Радиол. 2005; 56: 413–7. [PubMed] [Google Scholar]
45. Mah JK, Danforth RA, Bumann A, Hatcher D. Излучение, поглощенное при челюстно-лицевой визуализации с помощью нового стоматологического компьютерного томографа. Oral Surg Oral Med Oral Pathol Oral Radiol Endod. 2003;96: 508–13. [PubMed] [Google Scholar]
46. Байсал А., Карадеде И., Хекимоглу С., Укар Ф., Озер Т., Вели И. и др. Оценка резорбции корня после быстрого расширения верхней челюсти с помощью конусно-лучевой компьютерной томографии. Угол Ортод. 2012; 82: 488–94. [Бесплатная статья PMC] [PubMed] [Google Scholar]
47. Эриксон С., Курол П.Дж. Резорбция резцов после эктопического прорезывания клыков верхней челюсти: КТ-исследование. Угол Ортод. 2000;70:415–23. [PubMed] [Google Scholar]
48. Zhao Y, Nguyen M, Gohl E, Mah JK, Sameshima G, Enciso R. Изменения ротоглоточных дыхательных путей после быстрого расширения неба, оцениваемые с помощью конусно-лучевой компьютерной томографии. Am J Orthod Dentofacial Orthop. 2010; 137 (Приложение 4): S71–8. [PubMed] [Академия Google]
49. Валиатан М., Эль Х., Ханс М.Г., Паломо М.Дж. Влияние экстракции по сравнению с лечением без экстракции на объем ротоглоточных дыхательных путей. Угол Ортод. 2010;80:1068–74. [Бесплатная статья PMC] [PubMed] [Google Scholar]
50. Korbmacher H, Kahl-Nieke B, Schöllchen M, Heiland M. Значение двух конусно-лучевых систем компьютерной томографии с ортодонтической точки зрения. Дж Орофак Ортоп. 2007; 68: 278–89. [PubMed] [Google Scholar]
51. Chien PC, Parks ET, Eraso F, Hartsfield JK, Roberts WE, Ofner S. Сравнение надежности идентификации анатомических ориентиров с использованием двухмерной цифровой цефалометрии и трехмерной конусно-лучевой компьютерной томографии. in vivo . Дентомаксиллофак Радиол. 2009; 38: 262–73. [PubMed] [Google Scholar]
52. Ладлоу Дж. Б., Гублер М., Севиданес Л., Мол А. Точность идентификации цефалометрических ориентиров: конусно-лучевая компьютерная томография в сравнении с обычными цефалометрическими проекциями. Am J Orthod Dentofacial Orthop. 2009;136:312.e1–10. [Бесплатная статья PMC] [PubMed] [Google Scholar]
53. Wörtche R, Hassfeld S, Lux CJ, Müssig E, Hensley FW, Krempien R, et al. Клиническое применение конусно-лучевой цифровой объемной томографии у детей с расщелиной губы и неба. Дентомаксиллофак Радиол. 2006; 35: 88–94. [PubMed] [Google Scholar]
54. Shirota T, Kurabayashi H, Ogura H, Seki K, Maki K, Shintani S. Анализ объема кости с использованием системы компьютерного моделирования для вторичного костного трансплантата при альвеолярной щели. Int J Oral Maxillofac Surg. 2010;39:904–8. [PubMed] [Google Scholar]
55. Quereshy FA, Barnum G, Demko C, Horan M, Palomo JM, Baur DA, et al. Использование конусно-лучевой компьютерной томографии для объемной оценки дефектов альвеолярной щели — предварительные результаты. J Oral Maxillofac Surg. 2012; 70: 188–91. [PubMed] [Google Scholar]
56. Miyamoto J, Nakajima T. Антропометрическая оценка полной односторонней расщелины губы с помощью конусно-лучевой КТ в раннем детстве. J Plast Reconstr Aestet Surg. 2010;63:9–14. [PubMed] [Google Scholar]
57. Грибель Б.Ф., Грибель М.Н., Манци Ф.Р., Брукс С.Л., Макнамара Дж.А., мл. От 2D к 3D: Алгоритм получения нормальных значений для трехмерной компьютеризированной оценки. Угол Ортод. 2011;81:3–10. [Бесплатная статья PMC] [PubMed] [Google Scholar]
58. White AJ, Fallis DW, Vandewalle KS. Анализ внутризубных и межзубных измерений по цифровым моделям с использованием двух оттискных материалов и процесса моделирования на основе конусно-лучевой компьютерной томографии. Am J Orthod Dentofacial Orthop. 2010;137:456.e1–9. [PubMed] [Google Scholar]
59. Cevidanes LH, Styner MA, Proffit WR. Анализ изображений и наложение трехмерных моделей конусно-лучевой компьютерной томографии. Am J Orthod Dentofacial Orthop. 2006; 129: 611–8. [Бесплатная статья PMC] [PubMed] [Google Scholar]
60. Leuzinger M, Dudic A, Giannopoulou C, Kiliaridis S. Оценка корневого контакта с помощью панорамной рентгенографии и конусно-лучевой компьютерной томографии сверхвысокого разрешения. Am J Orthod Dentofacial Orthop. 2010; 137:389–92. [PubMed] [Академия Google]
61. Stampanoni M, Wyss P, Abela R, Borchert GL, Vermeulen D, Ruegsegger P. Международный симпозиум по оптической науке и технике: Международное общество оптики и фотоники; 2002. Рентгеновская томографическая микроскопия на швейцарском источнике света; стр. 42–53. [Google Scholar]
62. Келеº А., Алчин Х., Камалак А., Версиани М.А. Перелечивание канала овальной формы самонастраивающимся файлом: исследование с помощью микрокомпьютерной томографии. Clin Oral Investig. 2013 DOI: 10.1007/s00784-013-1086-0. [PubMed] [Академия Google]
63. Борба М., Миранда В.Г., младший, Сезар П.Ф., Григгс Дж.А., Бона А.Д. Оценка адаптации несъемных частичных протезов на основе диоксида циркония с использованием технологии микро-КТ. Браз Орал Рез. 2013; 27: 396–402. [PubMed] [Google Scholar]
64. King AD, Turk T, Colak C, Elekdag-Turk S, Jones AS, Petocz P, et al. Физические свойства корневого цемента: Часть 21. Степень резорбции корня после применения насадок 2,5° и 1,5° в течение 4 недель. Микрокомпьютерное томографическое исследование. Am J Orthod Dentofacial Orthop. 2011;140:e299–305. [PubMed] [Google Scholar]
65. Karadeniz EI, Gonzales C, Nebioglu-Dalci O, Dwarte D, Turk T, Isci D, et al. Физические свойства корневого цемента: Часть 20. Влияние фтора на ортодонтически индуцированную резорбцию корня с легкими и тяжелыми ортодонтическими усилиями в течение 4 недель: исследование с помощью микрокомпьютерной томографии. Am J Orthod Dentofacial Orthop. 2011; 140:e199–210. [PubMed] [Google Scholar]
66. Underhill TE, Chilvarquer I, Kimura K, Langlais RP, McDavid WD, Preece JW, et al. Оценка радиобиологического риска в стоматологической радиологии: Часть 1. Поглощенные дозы в критических органах. Oral Surg Oral Med Oral Pathol. 1988;66:111–20. [PubMed] [Google Scholar]
67. Yamamoto K, Hayakawa Y, Kousuge Y, Wakoh M, Sekiguchi H, Yakushiji M, et al. Диагностическая ценность компьютерной томографии с настроенной апертурой по сравнению с обычной дентоальвеолярной визуализацией при оценке ретенированных зубов. Oral Surg Oral Med Oral Pathol Oral Radiol Endod. 2003; 95: 109–18. [PubMed] [Google Scholar]
68. Nguyen CX, Nissanov J, Özturk C, Nuveen MJ, Tuncay OC. Трехмерное изображение черепно-лицевого комплекса. Клин Ортод Рез. 2000;3:46–50. [PubMed] [Академия Google]
69. Тункай О.К. Трехмерное изображение и анимация движения. Семин Ортод. 2001; 7: 244–50. [Google Scholar]
70. Techalertpaisarn P, Kuroda T. Трехмерная компьютерно-графическая демонстрация изменений мягких тканей лица у пациентов с прогнатией нижней челюсти после остеотомии сагиттальной ветви нижней челюсти. Int J Adult Orthodon Orthognath Surg. 1998; 13: 217–25. [PubMed] [Google Scholar]
71. Карри С., Баумринд С., Карлсон С., Бирс А., Бойд Р. Интегрированное трехмерное черепно-лицевое картирование в Лаборатории приборов для черепно-лицевых исследований/Тихоокеанского университета. Семинары по ортодонтии. 2001; 7: 258–65. [Академия Google]
72. Хаджир М.Ю., Аюб А.Ф., Миллетт Д.Т., Бок М., Зиберт Дж.П. Трехмерная визуализация в ортогнатической хирургии: клиническое применение нового метода. Int J Adult Orthodon Orthognath Surg. 2002; 17: 318–30. [PubMed] [Google Scholar]
73. Лархейм Т.А. Современные тенденции визуализации височно-нижнечелюстного сустава. Oral surg Oral Med Oral Pathol Oral Radiol Endod. 1995; 80: 555–76. [PubMed] [Google Scholar]
74. Уэббер Р.Л., Хортон Р.А. Компьютерная томография с настроенной апертурой (ТАКТ). Теория и применение в стоматологической радиологии. В: Фарман АГ, редактор. Успехи в челюстно-лицевой визуализации. БВ: Эльзевир Сайенс; 1997. стр. 359–62. [PubMed] [Google Scholar]
75. Mah J, Enciso R, Jorgensen M. Лечение пораженных клыков с помощью трехмерной объемной визуализации. J Calif Dent Assoc. 2003; 31: 835–41. [PubMed] [Google Scholar]
76. Букштейн, Флорида. Геометрия инвариантов черепно-лицевого роста. Эм Джей Ортод. 1983; 83: 221–34. [PubMed] [Google Scholar]
77. van Dijke CF, Kirk BA, Peterfy CG, Genant HK, Brasch RC, Kapila S. Артрит височно-нижнечелюстного сустава: корреляция параметров МРТ с макромолекулярным контрастированием и гистопатологических результатов. Радиология. 1997;204:825–32. [PubMed] [Google Scholar]
78. Робб Р.А. Динамический пространственный реконструктор: рентгеновский видеофлюороскопический компьютерный томограф для динамического объемного изображения движущихся органов. IEEE Trans Med Imaging. 1982; 1: 22–33. [PubMed] [Google Scholar]
79. Макки И.В., Уильямсон П.С., Лам Э.В., Хео Г., Гловер К.Е., майор П.В. Точность 4 панорамных ед. в проекции мезиодистальных углов зуба. Am J Orthod Dentofacial Orthop. 2002; 121:166–75. [PubMed] [Google Scholar]
Программа обработки трехмерных изображений для точной, быстрой и полуавтоматической сегментации соматов нейронов с плотным отростком нейритов
Введение
Анализ нервной ткани или суррогатных тканей все чаще выполняется в трехмерном (3-D) контексте, поскольку нейронные инженеры и нейробиологи начинают лучше понимать взаимодействие клеток и клеток и внеклеточного матрикса на уровне тканей. . Изучение нервных клеток в трехмерных средах увеличилось как в приложениях in vivo , так и в приложениях in vitro , и выиграло от достижений в технологии получения изображений. Например, методы визуализации, такие как многофотонная микроскопия, позволяют визуализировать и контролировать нервные клетки на все более глубоких уровнях коры головного мозга у живых животных (Stosiek et al., 2003; Sullivan et al., 2005; Gobel et al., 2007). предоставляя широкий спектр временной и трехмерной пространственной информации. Кроме того, исследователи все чаще используют более репрезентативные трехмерные системы клеточных культур вместо традиционных двумерных (2-D) клеточных культур (Yu et al., 19).99; Лин и др., 2005b; Каллен и Лаплака, 2006 г.; Каллен и др., 2011; Хопкинс и др., 2015). Этот трехмерный контекст демонстрирует преимущества традиционных систем in vitro , позволяя при этом исследовать клеточное поведение в более физиологическом состоянии, включая взаимодействия между клетками и клетками и внеклеточным матриксом, которые могут быть ограничены в плоских культурах.
По мере того, как методы получения изображений и технологии культивирования клеток совершенствуются, позволяя использовать глубокие (т. е. толстые) трехмерные среды, возрастает потребность в инструментах анализа, облегчающих исследование морфологии и функций клеток в рамках этой структуры. В частности, такие исследования могли бы облегчить автоматизированные процедуры анализа изображений для быстрой и точной сегментации флуоресцентно меченных нервных клеток и/или их процессов. Проблемы, связанные с автоматическим анализом изображений, усугубляются в нейронных системах, где типичный анализ затруднен такими проблемами, как разнообразная клеточная морфология, сложный рост отростков и высокая плотность клеток.
Соответственно, наша цель состояла в том, чтобы создать надежную систему, позволяющую проводить быстрый и точный анализ различных клеточных морфологий без специальных или множественных режимов окрашивания. Существующие алгоритмы автоматизированной сегментации с трудом обеспечивают высокопроизводительное картирование сложных морфологических и функциональных взаимодействий. Например, несмотря на то, что многие методики могут точно количественно определять мечение ядер (т. е. сферических) в 2-D или 3-D, одно только окрашивание ядер по своей сути ограничивает, поскольку они пропускают информацию, относящуюся к таким важным показателям, как морфология клеток, рост нейритов и клеточная активность. клеточные взаимодействия (например, рецептор-опосредованные или синаптические). При маркировке сомат нейронов коммерческое программное обеспечение подвержено ошибкам при количественной оценке двумерных изображений нейронов, поскольку отростки большого калибра обычно учитываются как клетки (неопубликованные наблюдения). Кроме того, общедоступные системы обычно относятся к одному из двух разных лагерей: (1) системы, управляемые пользователем (например, Nerolucida, StereoInvestigator), которые обладают превосходными возможностями реконструкции, но занимают очень много времени, или (2) полностью автоматизированные системы, (например, подпрограммы ImageJ, Image Pro Plus), которые могут быть быстрыми, но, как правило, предлагают небольшой контроль со стороны пользователя и могут быть неточными, учитывая неправильную (например, несферическую) морфологию нервных клеток, несущих процесс. Одной из недавних альтернатив этим двум категориям является структура FARSIGHT, которая позволяет проводить комплексный анализ и ассоциативный анализ изображений (Bjornsson et al., 2008; Luisi et al., 2011). Несмотря на свои мощные возможности, эта структура требует нескольких гистологических маркеров и требует больших вычислительных ресурсов. Аналогичным образом, представленные в литературе методы обработки изображений, специфичные для нейронов, обычно имеют одно из двух различных применений: (1) характеристика клеточной популяции, в которой алгоритмы сегментируют ядер нейронных конструкций средней и высокой плотности, включая редактор ядер FARSIGHT (Solórzano et al., 1999; Sarti et al., 2000; Chawla et al., 2004; Bjornsson et al., 2008; Latorre et al., 2013). ) или (2) реконструкция одной клетки (или низкой плотности) с очень подробными трассировками отдельных клеточных процессов, включая редактор трассировки FARSIGHT (Al-Kofahi et al., 2002, 2003; Koh et al., 2002; Meijering et al. ., 2004; Zhang et al., 2007; Luisi et al., 2011). Следует отметить, что FARSIGHT может считать ядра или отслеживают нейриты в отдельных модулях, но в настоящее время структура недостаточно надежна, чтобы обрабатывать соматы и нейриты вместе.
Учитывая этот ландшафт, цель текущей работы состояла в том, чтобы заполнить пробел в возможностях анализа. В частности, мы разработали стратегию, которая позволяет оптимизировать параметры визуализации для получения сигнала от нейритов, что можно сделать с помощью визуального осмотра, а точные конфокальные настройки не требуются в качестве входных данных для нашего программного обеспечения. Приобретение нейритов часто насыщает сигнал для клеточных тел. Напротив, если вы оптимизируете соматы, часто остается скудная или несуществующая информация о нейритах (таким образом, стандартные функции «автонастройки» пропускают важные микрофункции). Конечно, эту проблему можно частично решить с помощью жестких ограничений по оптической толщине и приращению z-стека, но это часто достигается за счет огромного времени, необходимого для получения изображения. Более того, наш подход применим к любому методу или красителю, который одновременно маркирует мелкие детали и надежные функции, что позволяет получать многогранную информацию. В частности, наш метод позволяет собирать информацию о клеточных телах, не отбрасывая (или не получая) информацию о связности сети при захвате с использованием одной метки (например, генетической экспрессии флуоресцентного белка или других цитоплазматических флуоресцентных маркеров). Этот метод значительно увеличивает производительность 3D-работы на каждом этапе процесса от маркировки/окрашивания до получения изображения с помощью количественного анализа. Кроме того, мы демонстрируем, что это увеличение пропускной способности не снижает точность или качество получаемых данных. Представленная здесь работа предлагает исследователям простой, настраиваемый одноканальный инструмент для автоматизированного анализа изображений с управляемыми пользователем коррекциями, которые можно оптимизировать для компенсации специфических проблем, связанных с анализом трехмерных нейронных систем. В частности, в отличие от любого другого текущего варианта, представленный здесь инструмент анализа предлагает возможность идентифицировать соматы нейронов с плотным разветвлением нейритов в толстых трехмерных конструкциях или ткани.
Мы достигаем этого путем модификации существующих методов, а также разработки новых функций. Предыдущие исследования были посвящены методам 2-D и 3-D -ядерной -сегментации (Irinopoulou et al., 1997; Lin et al., 2005a). Одним из неоднократно используемых алгоритмов является высокоэффективный алгоритм водораздела (Umesh Adiga, 2001; Lin et al., 2003). Несмотря на широкое использование этого алгоритма для очерчивания клеточных объектов, этот метод печально известен чрезмерной сегментацией, ошибкой, которая возникает, когда отдельные ядра разбиваются на несколько компонентов. Другие исследователи решили эту проблему, используя априорных знаний, чтобы умело формировать контуры изображения, направляющие сегментацию объекта. Например, в одном методе использовалась комбинация признаков градиента и преобразования геометрического расстояния для формирования изображения на основе как геометрических характеристик, так и характеристик интенсивности (Lin et al. , 2003). Другой метод вообще избегал алгоритмов сегментации на основе областей и рисовал линии между связанными углублениями или «линиями шеи», чтобы разделить перекрывающиеся ядра (Belien et al., 2002). Хотя эти методы обработки улучшали результаты сегментации, они не могли полностью предотвратить чрезмерную сегментацию. Для остальных ошибок постобработка оказалась очень эффективной. В частности, Лин и Адига продемонстрировали отличные результаты, используя геометрические параметры (например, площадь, выпуклость и текстуру) для управления слиянием соседних сегментированных объектов (Адига и Чаудхури, 2001; Лин и др., 2003, 2005a).
В дополнение к классической проблеме сегментации алгоритмы нейронной обработки изображений имеют проблему быстрого различения соматов от нейритов. В нашем приложении, в котором мы извлекаем границы сомат из изображений с плотными нейритами, преимуществом становится водораздел «сверхсегментация» нейритов. Колючие и ямчатые выступы (или рецессии) нейритов «неправильно направляют» рутину водораздела и производят сильно расколотые и раздробленные элементы. Тела клеток, с другой стороны, обычно имеют более округлую и гладкую морфологию. В связи с этим сегментация клеток и нейритов принимает совершенно разные формы и размеры, и именно на основе этих различий мы можем классифицировать и, таким образом, удалять нежелательные черты из изображения. Однако, несмотря на то, что ломкая сегментация предназначена для нейритов, она нежелательна, когда она возникает в соматах. Мы можем исправить чрезмерную сегментацию тела клетки, используя трехмерные контекстные подсказки для выявления проблемных областей. В частности, мы можем сначала сегментировать ячейки в каждом двумерном кадре (z-срез в определенных 9 точках).0324 z ), а затем использовать информацию из перекрывающихся ячеек в соседних кадрах (позиции z-1 и z+1 ) для выявления ошибок.
Хотя трехмерный контекст может устранить многие ошибки, мы и другие исследователи увидели, что он не может устранить все ошибки сегментации (Latorre et al., 2013). Поэтому мы также внедрили режим коррекции с помощью программного обеспечения, чтобы еще больше снизить частоту ошибок. Следовательно, мы использовали многостороннее решение, включающее сегментацию соматов и нейритов, коррекцию трехмерной контекстной сегментации и программную проверку пользователя, чтобы свести к минимуму частоту ошибок.
В этой статье мы представляем методы, позволяющие быстро и надежно отличить тела клеток от нейритов и автоматически идентифицировать ошибки сегментации. Кроме того, мы предоставляем методы программного исправления любых оставшихся ошибок вручную. Наша общая цель состояла в том, чтобы предоставить быстрый, надежный и простой в использовании алгоритм, который включал бы возможность идентифицировать соматы нейронов в трехмерных тканях или суррогатных тканях в z-стеках, сохраняя морфологические данные / данные о связности, тем самым улучшая объем и эффективность анализов. без ущерба для точности. Мы экспериментально проверили эти методы, используя конфокальные z-стеки, взятые из толстых трехмерных изображений 9.0324 in vitro нейронных конструкций, состоящих из простых одноканальных флуоресцентно меченных нейронов с увеличивающимся ростом нейритов и морфологической сложностью. Кроме того, мы провели количественную оценку флуоресцентно меченных нервных клеток на толстых органотипических ex vivo срезах головного мозга. Результаты, полученные с помощью нашего алгоритма, были статистически сопоставлены с «золотым стандартом», то есть с ручным анализом человека. Эта аналитическая платформа предоставляет ценные методы для объективных измерений нервных клеток в трехмерном контексте и направлена на функциональное отслеживание взаимодействий нейрон-нейрон в четырехмерном пространстве.
Материалы и методы
Трехмерные культуры первичных кортикальных нейронов и органотипические культуры срезов мозга
Все процедуры с участием животных соответствовали рекомендациям, изложенным в Руководстве NIH по уходу и использованию лабораторных животных, и были одобрены Технологическим институтом Джорджии. Комитет по уходу и использованию животных. Все реагенты для клеток были получены от Invitrogen (Карлсбад, Калифорния) или Sigma (Сент-Луис, Миссури), если не указано иное. Ткань собирали у крыс Sasco Sprague-Dawley (Charles River, Wilmington, MA) после анестезии изофлураном.
Нейроны были получены из эмбриональных плодов крыс 17–18 дней путем выделения коры головного мозга, которую диссоциировали с использованием трипсина (0,25%) + 1 мМ ЭДТА (10 мин при 37°C) с последующей ДНКазой (0,15 мг/мл). Нейроны были захвачены в несколько составов трехмерных культуральных матриц Matrigel (Matrigel в основном представляет собой коллаген и ламинин; 7,5 мг/мл; BD Biosciences) или агарозы SeaPrep (1,5%; Cambrex) либо с ковалентно сшитым коллагеном IV, либо без него (0,3 –0,6 мг/мл), как описано ранее (Cullen and Laplaca, 2006; Cullen et al., 2007). Культуры имели толщину 500–1000 мкм при конечной плотности клеток 3750–5000 клеток/мм 9 .1004 3 , питали средой для нейронов (нейробазальная среда + 2% B-27 + 500 мкМ L-глутамина) и выдерживали в инкубаторе для тканевых культур (37°C, 5% CO 2 , 95% увлажненный воздух).
Срезы мозга были получены у крысят на 11-12 день после рождения путем выделения мозга и создания коронарных срезов толщиной 400 мкм с использованием измельчителя тканей McIIwain (Mickle Laboratory Engineering, United Kingdom). Среда в течение первых 2 дней представляла собой 50% Opti-Mem + 25% сбалансированный солевой раствор Хэнкса + 25% инактивированной нагреванием лошадиной сыворотки + 5 мг/мл D-глюкозы + 1 мМ L-глутамина; после этого среда представляла собой среду Neurobasal + 2% B-27 + 5 мг/мл D-глюкозы + 1 мМ L-глутамина. Эти органотипические культуры срезов мозга поддерживали в инкубаторе для тканевых культур на мембранах Millipore в 6-луночных планшетах, содержащих 1,2 мл среды на лунку.
Флуоресцентное мечение и получение изображений
Клетки и срезы мозга метили с использованием флуоресцентных зондов для различения живых и мертвых клеток (набор LIVE/DEAD Viability/Cytotoxicity Kit; Molecular Probes, Eugene, OR). Культуры клеток и срезы мозга промывали в буфере и инкубировали с 2 мкМ кальцеина АМ и 4 мкМ гомодимера-1 этидия при 37°С в течение 30 мин и промывали в PBS. После окрашивания на жизнеспособность/цитотоксичность клетки/срезы просматривали с помощью лазерного сканирующего конфокального микроскопа (Zeiss 510, Оберкохен, Германия) с аргоновым и гелий-неоновым лазерами. Изображения были получены с 20-кратным и 40-кратным увеличением с помощью Zeiss LD Plan Apochromat 20×0,80 N.A. с полем зрения 460,7 мкм × 460,7 мкм или 40-кратным: Zeiss Fluar 40×1,30 N.A. Oil с полем зрения 230,3. мкм × 230,3 мкм. Настройки (например, размер точечного отверстия, время экспозиции, усиление, время сканирования, время выдержки и т. д.) были оптимизированы для каждого образца, чтобы отобразить самые тонкие особенности каждого образца (процессы нейритов). Множественные z-стеки (расстояние между плоскостями 5–20 мкм, в зависимости от используемого объектива — изображения 20× были размером 10–20 микрон и 40 × 5–10 микрон) были получены из различных условий культивирования и экспортированы как Файлы AVI с разрешением 512 × 512 пикселей (на z-срез/кадр) и глубиной цвета 24 бита. Для каждого образца был проанализирован участок толщиной 100 мкм вдали от верхней или нижней поверхности образца, чтобы избежать краевых эффектов. Конфокальные изображения просматривали с помощью LSM 5 Image Browser (Zeiss).
Условия тестирования сегментации
Процедуры автоматической сегментации были написаны в Matlab (Mathworks, версия 7.01) и протестированы на 16 конфокальных z-стеках, которые были разделены на четыре уровня сложности культуры. Были протестированы различные уровни сложности, чтобы выяснить, влияет ли увеличение сложности на морфологию нейронов и рост нейритов (формирование сети) на способность наших сложных алгоритмов минимизировать ошибку (рис. 1). На всех уровнях использовались трехмерные культуры первичных корковых нейронов, однородно распределенных по толстому (> 500 мкм) матриксу. Различные параметры культуры, такие как тип матрицы (биоактивный матригель/коллаген-ламинин и относительно биоинертная агароза) и плотность посева клеток (3750–5000 клеток/мм 9 ).1004 3 ) привели к морфологически различным культурам. Переменными, приводящими к разным уровням культуры, были плотность/кластеризация клеток (функция плотности матрикса и клеточного посева; влияющая степень перекрытия соматических клеток), рост нейритов (функция разрешающей способности матрикса; влияющий процесс, неклеточная сома, количество) и нейроны. морфология (функция матрикса; изменение формы клеточной сомы). Первые три категории (из четырех) использовали агарозу в качестве матричного материала, что привело к сохранению сферической или почти сферической морфологии нейронов. Культуры уровня 4 были созданы в биоактивном матриксе Matrigel/коллаген-ламинин, где нейроны были способны активно ремоделироваться и, таким образом, принимать различные комплексы 9.0324 in vivo -подобная (например, несферическая) морфология, отсутствующая на уровнях 1–3. Разница между уровнями 1, 2 и 3 заключается в количестве разрастания нейритов и возникающей в результате кластеризации клеток. В частности, уровень 1 представлял собой базовый уровень со сферической морфологией нейронов по всей культуре, относительно низкой плотностью клеток (т. Культуры уровня 2 имели умеренное увеличение роста нейритов с плотностью клеток и морфологией, аналогичной уровню 1. Культуры уровня 3 продемонстрировали обширный рост нейритов с соответствующим увеличением плотности клеток. Культуры уровня 4 также продемонстрировали значительный рост нейритов, и хотя эти культуры имели умеренную плотность клеток, в некоторых случаях наблюдалось скопление клеток. Описание уровней культуры сведено в Таблицу 1. В дополнение к тестированию нескольких категорий из in vitro культур, мы оценили надежность алгоритма, применив процедуры автоматизированной сегментации к конфокальным z-стекам, полученным из ex vivo срезов головного мозга.
Рисунок 1. Определение категорий испытаний . Варьирование условий тестирования было достигнуто путем разделения культур на четыре категории в зависимости от сложности культуры. Уровни с первого по третий состояли в основном из сферических нейронов с увеличивающимся количеством отростков нейритов. В частности, (A) уровень один имел сферические нейроны с небольшим количеством нейритов и отсутствием кластеризации клеток; (B) уровень два имел в основном сферические нейроны с повышенным ростом нейритов и небольшой кластеризацией; (C) уровень три имел сильный рост нейритов с повышенной кластеризацией клеток (желтые кружки). Кроме того, четвертый уровень (D) имел повышенную сложность из-за более разнообразной, несферической морфологии нейронов (белый кружок), кластеризации клеток (желтый кружок) и значительного роста нейритов. Изображения представляют собой 2D-реконструкции конфокальных z-стеков (общая толщина 100 мкм), полученных с увеличением 20×; масштабная линейка = 50 мкм.
Таблица 1. Описание параметров трехмерной культуры нейронов по категории номер .
Методология валидации и статистический анализ
Для валидации работы программного обеспечения на различных этапах процедуры регистрировались общее количество клеток, доля ложноположительных клеток и доля ложноотрицательных клеток. Точность и процент ошибок были рассчитаны по сравнению с ручным подсчетом, выполненным опытными техниками. Валидацию проводили на всех 16 конфокальных z-стеках культур, а также на 2 z-стеках срезов мозга. Мы выбрали консервативный подход к проверке для анализа общей ошибки, присутствующей на различных этапах алгоритма. В частности, анализ ошибок был основан на общем проценте ошибок, определяемом как процентная ошибка, основанная на сумме количества ложноположительных результатов и числа ложноотрицательных результатов (вычисление точности исключительно на основе результатов подсчета может искусственно повышать производительность из-за ложных срабатываний и ложноотрицательные результаты потенциально могут компенсироваться). Общая линейная модель ANOVA с двусторонними повторными измерениями была выполнена со сложностью культуры (т. Е. Уровень 1–4) в качестве независимой переменной, точкой подпрограммы в качестве повторяющейся переменной и точностью подсчета, ложноположительным (%), ложноотрицательным (% ) и общая ошибка (%) как зависимые переменные. Когда между группами существовали значительные различия, проводились попарные сравнения Тьюки. Для всех статистических тестов p < 0,05 требовалось для достоверности. Данные представлены как среднее ± стандартное отклонение.
Разработка системы
Мы разработали алгоритмы для определения границ тела клетки для изображений, обладающих богатой морфологической детализацией и плотным разрастанием нейритов. Для маркировки трехмерных клеточных объектов в конфокальном стеке двумерных изображений (z-стек) мы рассмотрели две разные стратегии: (1) сегментация клеток в двумерных срезах и слияние перекрывающихся клеточных объектов (Tekola et al., 19).96; Иринопулу и др., 1997; Belien et al., 2002) и (2) сегментация клеток в трехмерных объемах (Sarti et al., 2000; Adiga and Chaudhuri, 2001; Chawla et al., 2004). Мы выбираем первое, потому что анализ этого типа легко поддается визуальной обратной связи и быстрому исправлению ошибок, а слияние двухмерных «капель» с трехмерными клеточными объектами дает возможность для выявления и исправления ошибок. Кроме того, двухмерная сегментация с трехмерной «сшивкой» может быть намного менее затратной в вычислительном отношении, чем трехмерная сегментация, и может обеспечить более быструю обработку. Несомненно, некоторые из этих преимуществ не являются исключительными для этой стратегии, но они более естественно выпадают из этого подхода, который значительно упрощает реализацию алгоритма. Для наших приложений требовалась обратная связь с пользователем и быстрое исправление ошибок «нажми и исправляй», где желательна как высокая пропускная способность, так и почти идеальная точность. Возможность быстро идентифицировать клеточные тела в любой момент живого эксперимента значительно повлияла на эту работу. Обзор всего процесса сегментации, включая 2-мерную сегментацию, 3-мерное слияние, автоматическое исправление ошибок и исправление ошибок с помощью программного обеспечения, представлен на рис. 2.
Рис. 2. Блок-схема процедур сегментации. (A) Z-стеки необработанных изображений были импортированы в программу. (B) Перед началом сегментации ячеек пользователь мог дополнительно указать параметры настройки сегментации (в противном случае использовались параметры по умолчанию). (C) Интересующие объекты, включая потенциальные соматы, были идентифицированы в каждом двумерном кадре в z-стеке. (D) Сегментированные объекты были дополнительно разделены на соматы кандидатов и фрагменты нейритов. (E) 2-D soma кандидаты были оценены по сравнению с объектами в соседнем z-срезе и либо сшиты вместе в 3-D объекты, либо удалены из рассмотрения. (F) После автоматической сегментации и исправления ошибок пользователь может выбрать ручное исправление любых оставшихся ошибок сегментации с помощью щелчков мышью. Во время процедуры слияния трехмерных изображений, если объект не соответствовал определенным критериям, он помечался, чтобы предупредить пользователя о возможной ошибке.
Двухмерная сегментация соматы и фильтрация нейритов
Хотя трехмерное слияние двухмерных клеточных объектов может компенсировать ошибки двухмерной сегментации, желательно, чтобы двумерная идентификация границ тела клетки была максимально точной. возможный. Для каждой из категорий тестов точная идентификация границ клеток требовала предварительной обработки изображения, двухмерной сегментации водоразделов, а также классификации объектов и фильтрации нейритов, которые подробно описаны ниже.
Цветовая фильтрация и глобальное пороговое значение
В качестве первого шага к идентификации сомат мы использовали цвет и интенсивность, чтобы разделить изображение на области переднего плана и фона. Через графический интерфейс пользователь прокручивал гистограммы интенсивности для каждого цвета для каждого двумерного кадра в z-стеке. Для указанного красителя извлекался цветовой компонент, и каждый кадр преобразовывался в изображение с ахроматической интенсивностью (рис. 3А), после чего для разделения пикселей изображения на передний план и фон применялся глобальный порог интенсивности, T (рис. 3В). ). Пиксели со значением интенсивности выше порога идентифицировались как потенциально принадлежащие соматам, и им присваивалось значение 1. Пикселам ниже порога присваивалось 0 или фоновое значение: I(x, y) = {1 I ≥ T; 0 иначе}, где x и y представляют индексы пикселей в кадре двумерного изображения. После применения порога оставшиеся объекты в бинарном изображении состояли из сомат, нейритов и артефактов изображения.
Рис. 3. Схема процесса двумерной сегментации тел клеток . Графическое изображение процесса двухмерной сегментации: (A) Цветовой компонент интересующего флуоресцентного красителя был извлечен для формирования изображения ахроматической интенсивности; (B) Для каждого двумерного кадра в z-стеке применялся глобальный порог, разделяющий пиксели на передний план (области интереса) и фон; (C) Региональные минимумы были определены путем применения преобразования евклидова расстояния (или, альтернативно, преобразования Чебышева) к «пороговому» изображению; (D) После применения преобразования расстояния к преобразованному изображению был применен алгоритм водораздела: пестрые контуры нейритов давали очень рваные границы сегментации, в то время как более круглая и гладкая морфология сомы давала точные границы сегментации; (E) Объекты были классифицированы как фрагменты сомы или нейритов в соответствии с площадью, ограниченной линиями водораздела, а фрагменты нейритов были исключены из рассмотрения. (F) Изображение границ тела клетки, спроецированное обратно на исходное изображение.
Дополнительная морфологическая фильтрация
После разделения изображений на области переднего и заднего плана можно применить морфологические операторы для удаления отверстий внутри оставшихся объектов (и для разделения перекрывающихся объектов, связанных с очень узкими областями). В наших тестовых изображениях было очень мало различий в интенсивности между пикселями, которые представляли соматы; поэтому применение глобального порога не приводило к появлению дыр в объектах переднего плана. (Чтобы получить изображения с нейритами и богатыми морфологическими деталями, мы использовали источник света высокой интенсивности во время получения изображения, и в результате многие пиксели сомы и нейритов были насыщены или близки к насыщению.) Таким образом, нам не требовалось морфологическая фильтрация для изменения формы бинарных изображений; однако в случае изображений уровня 3, где скопление клеток было безудержным, а рост нейритов распространялся повсеместно, мы использовали бинарное ядро 3 × 3 с центральным элементом и 4 ближайшими соседями, установленными на 1 (т. е. «алмазный» формирующий элемент) размывать бинарные изображения. Успешное использование морфологической фильтрации на культурах уровня 3 указывает на гибкость системы для работы независимо от морфологической фильтрации, морфологии культуры или насыщенности изображения.
В общем, отказ от морфологической фильтрации может иметь свои преимущества, поскольку в результате сглаживания можно удалить пространственные признаки, которые естественным образом указывают на перекрывающиеся объекты (Crespo and Maoio, 1999; Kumar and Shunmugam, 2006). Учитывая отсутствие вариаций интенсивности внутри сомы наших изображений, морфологическая фильтрация, как правило, не требовалась. Без морфологической фильтрации «линии шеи» и другие точки перегиба были сохранены, чтобы помочь правильно определить региональные минимумы, которые определяют сегментацию объектов, но морфологическая фильтрация, выполненная в культурах уровня 3, показала, что алгоритм не зависит от сохранения этой информации или перенасыщенных изображений. Таким образом, хотя последовательное использование операторов расширения и эрозии может помочь удалить некоторые особенности нейритов, такие меры могут также удалить важные граничные индикаторы.
Преобразование расстояния
Для успешного применения алгоритма водораздела необходимо, чтобы каждый объект был отмечен региональным минимумом и чтобы контуры изображения более или менее следовали границам объекта. К сожалению, естественных градиентов интенсивности недостаточно для определения региональных минимумов для каждого объекта (Lin et al., 2003). Это было особенно верно для наших тестовых изображений, где почти насыщенные пиксели имели очень небольшую текстуру в области сомы. Несмотря на это, инструмент анализа был создан для правильной работы независимо от насыщенной или ненасыщенной области сомы. Чтобы получить региональные минимумы и контуры объекта, преобразование евклидова расстояния было применено к стеку бинарных изображений (рис. 3C):
I(x,y)=(x−xb)2 + (y−yb)2 (1)
, где x b и y b представляют собой координаты ближайшего пикселя фона. Локальные минимумы присваивались пикселям с максимальным значением расстояния до ближайшего пикселя фона. Для большинства тестовых изображений евклидово преобразование дало удовлетворительные результаты. Однако для изображений с высокой степенью кластеризации и плотным разрастанием нейритов (уровень 3 и уровень 4) для минимизации ошибок пересегментации использовалось преобразование Чебышева или «шахматная доска»:
I(x,y)=max (|x−xb|, |y−yb|) (2)
Преобразование евклидова расстояния учитывает проекцию вдоль обеих осей x- и y между заданным пиксель и его геодезическое расстояние до фона. Поскольку преобразование Чебышева определяет значения на основе максимальной проекции вдоль оси x- или y, определение локальных минимумов может быть более устойчивым к ошибочным изменениям вдоль одной оси. Таким образом, изображения с чрезвычайно богатой и сложной морфологией оказываются менее восприимчивыми к ошибкам сегментации при применении преобразования Чебышева.
Двухмерная сегментация водораздела и классификация объектов
После того, как региональные минимумы были определены преобразованными изображениями, мы применили алгоритм двумерного водораздела для сегментации объектов (рис. 3D). Алгоритм водораздела включает интерпретацию изображения как поверхности, на которой точки с одинаковым значением интенсивности находятся на одной высоте, и классификацию точек в соответствии с направлением градиента в их соответствующих местоположениях: (1) региональный минимум, точки, которые находятся на локальный минимум поверхности, (2) «водосборные бассейны», точки, градиенты которых указывают в направлении одного и того же минимума, и (3) «линии водораздела», точки, которые находятся на локальном максимуме и, таким образом, могут принадлежать любому соседнему минимумы. Обычная аналогия для описания алгоритма водораздела включает пробивание дыры в каждом региональном минимуме, а затем заполнение всего изображения снизу. Затем строятся линии водоразделов или границы сегментации, чтобы предотвратить перекрытие отдельных областей затопления. Ранее было описано множество подробностей реализации двумерных и трехмерных водоразделов (Adiga and Chaudhuri, 2001; Gonzalez and Woods, 2002).
Алгоритм водораздела создал границы сегментации, связанные с контурами изображения. В то время как пестрые контуры нейритов приводили к сильно изломанным объектам, относительно гладкая морфология клеток приводила к более крупным и округлым объектам. Именно на основе этих различий мы легко различали типы объектов. На рис. 4 показано типичное бимодальное распределение для сегментированных объектов, объединенных в бины по площади пикселей, которые представляются пользователю. На основе гистограммы пользователь может интеллектуально установить пороговое значение площади в зависимости от своего конкретного микроскопа, культуры или состояния ткани. Объекты меньше порога площади, α, были помечены фрагментами нейритов, а объекты больше α были помечены клеточными объектами. Впоследствии все границы сегментации, соответствующие объектам с площадями ниже α, были исключены из рассмотрения (рис. 3E), а результат визуализировался с наложением на исходное изображение (рис. 3F). Популяции не были полностью различимы, поэтому была небольшая вероятность того, что некоторые фрагменты нейритов остались; точно так же могли быть удалены несколько небольших клеточных тел. Мы исправили включение ошибок сегментации, наблюдая особенности, возникающие при объединении 2-D объектов в 3-D тела клеток.
Рис. 4. Распределение сегментированных объектов в бинах по площади пикселей. Морфологические различия между нейритами и соматами создают границы сегментации водораздела, которые при группировании в соответствии с площадью пикселя попадают в две отдельные популяции. Порог α (вертикальная пунктирная линия) используется для разделения объектов на нейриты и тела клеток. Объекты с количеством пикселей или площадью ≥ α помечаются как «ячейки»; объекты с площадью < α называются «фрагментами нейритов». (Врезка) Границы водораздела для фрагментов сомат и нейритов.
Трехмерное слияние и идентификация ошибок
После сегментации водораздела и классификации объектов каждый двухмерный кадр содержал сегментированные объекты, попадающие в одну из трех категорий: (1) правильно сегментированные соматы, (2) ложные срабатывания (нейриты, артефакты). , и сверхсегментированные клетки) и (3) ложноотрицательные результаты (недостаточно сегментированные соматы и неопознанные клеточные тела). Чтобы завершить сегментацию клеток в трех измерениях, мы объединили 2-D объекты в 3-D тела клеток и использовали конфликты, возникающие при объединении, для выявления и, в большинстве случаев, автоматического исправления ошибок сегментации (рис. 5). Алгоритм слияния двухмерных «клякс» с трехмерными ячейками включал оценку слияния с двух точек зрения: (1) прямая проекция двумерного сотового объекта на перекрывающиеся объекты в соседнем кадре и (2) обратная проекция перекрывающихся объектов обратно в исходный кадр. Эти две точки обзора гарантировали, что будут объединены только ячейки с максимальным взаимным перекрытием. (Сценарий, который мы называем «безответным перекрытием», может возникнуть, когда объект C 1 в кадре F i максимально перекрывается с другим объектом, C 2 в кадре F 9.1006 i+1 , который имеет наибольшее максимальное взаимное перекрытие с еще одним объектом, C 3 , в кадре F i ).
Рис. 5. Иллюстрация слияния трехмерных изображений и выявления ошибок. (Слева) На этом рисунке показаны результаты сегментации для трех ячеек — A, B и C — которые появляются в z-срезах/кадрах Fi, Fi+1 и Fi+2. В кадре Fi+1 мы показываем три правильно сегментированных сомата. В кадрах Fi и кадрах Fi+2 мы иллюстрируем ошибки чрезмерной и недостаточной сегментации соответственно. 2-D объекты объединяются в тела 3-D ячеек, если процент перекрытия между объектами ≥ β, где β может быть любым числом от 0 (нет перекрытия) до 1 (100% перекрытия). Алгоритм слияния одновременно рассматривает два z-среза/кадра, и ошибки сегментации выявляются, когда несколько объектов в одном кадре превышают β. ( Верхний правый ) Например, ячейка B из кадра Fi+1 была спроецирована в Fi+2. Все объекты в Fi+2, которые перекрываются с проекцией B (граница пунктирной ячейки), рассматривались как кандидаты на слияние; в этом случае объект B + C удовлетворял критериям процентного перекрытия. Однако обратная проекция лучшего кандидата на слияние B, B + C, обратно на предыдущий z-срез/кадр идентифицировала два объекта, удовлетворяющих критериям слияния: B и C. Поскольку три объекта — B, C и B + C — подходили для слияния, была обнаружена ошибка недостаточной сегментации (серый прямоугольник). ( Внизу справа ) Аналогичным образом, прямая проекция A1 в Fi+1 лучше всего перекрывается с A; однако обратная проекция лучшего кандидата на слияние A1 значительно перекрывается с двумя объектами: A1 и A2, что указывает на ошибку двумерной сегментации.
В дополнение к критериям взаимности для слияния 2-D объектов в тела 3-D ячеек, мы требовали, чтобы процент перекрытия объектов между 2-D объектами превышал эмпирически определенный порог, β, определяемый как доля пересекающихся пикселей , Площадь(c i n c i+1 ), к количеству пикселей объекта, площади (c i ). Если 90 324 нескольких 90 325 объектов с любой точки зрения превышают β, то, вероятно, произошла ошибка сегментации. Затем для разрешения конфликта может быть предпринято любое количество действий, таких как слияние чрезмерно сегментированных объектов, разделение недосегментированных объектов или пометка пикселей объекта-нарушителя для ручной проверки пользователем (по завершении всех автоматических процедур). Для нашего приложения мы выбираем простой способ действия: для всех ошибок, выявленных в прямой проекции, мы объединили объекты и устанавливают флаги для проверки пользователя; для ошибок, выявленных в обратной проекции, мы помечали только объекты-нарушители для проверки пользователем. (Эмпирическим путем было установлено, что для большинства выявленных ошибок требуется слияние, но недостаточная сегментация, требующая разделения, с большей вероятностью выявляется в обратной проекции.) Пороговое значение β принимало любое значение от 0 (отсутствие перекрытия) до 1 (полное перекрытие), где чем меньше реализованный параметр, тем более чувствителен алгоритм к возможным ошибкам. В любом кадре, если двухмерный клеточный объект не был связан с пикселями в соседних кадрах, он считался артефактом или нейритом и удалялся. Алгоритм представлен в виде псевдокода ниже:
Процедура 3Dmerge_ErrorCheck
Fi = Кадр в z-стеке
C Fi = {Набор 2-D объектов в Кадре, Fi}
C j 92005 Fi 0 объект 6 Fi
Инициализация: E Fi = {0}; Набор из
объектов, отмеченных ошибкой
Инициализация: Ce Fi = C Fi ∀ Fi; Набор объектов
пригодных для трехмерного слияния
для каждого кадра в Z-Stack, FI
для каждой Cell Dailable , CE J FI , в текущем
Frame, FI
FK = FI
. j Fk на F k+1
Co ←Ce j Fk ∩ C Fk+1 ; Co — это набор
перекрывающихся объектов в C Fk+1
Если объекты в Co, превышающие β, Cb, равны
больше 1
A. Объединить Cb в 2-D
B. Пометить объекты для проверки на наличие ошибок;
E Fk+1 ← E Fk +1 ∪ Cb ∪ Ce j Fk
2. Project Cb onto F k
Co ← Cb ∩ C Fk ; Где Co установлен из
перекрывающиеся объекты в C Fk
Если объекты в Co превышают β, Cr,
больше 1
A.
E FK ← E FK ∪ CR
3. Если CE J FK и CB Share
Mutual Overlap
A. Merge CE Дж.1006 FK и CB в 3-D
B. Снимите CB из получения
Set, CE FK+1
C. Приращение FK
до CE J FK не прилагается к новому CE FK . объект в
3-D (шаг 3A)
Пользовательский интерфейс и программная коррекция ошибок
Обсуждаемые ранее алгоритмы обработки изображений были интегрированы в графический пользовательский интерфейс (GUI), который был разработан для облегчения выбора параметров, визуальной обратной связи и редактирование под руководством пользователя (рис. 6). В графический пользовательский интерфейс были включены следующие функции: (1) 2-мерные и 3-мерные базы данных ячеек для сохранения координат ячеек и информации о границах, (2) гистограммы и статистика сегментации для облегчения выбора параметров, (3) параметры сохранения и перезагрузки для повторного посещения и пересмотр z-стеков, (4) компьютеризированная ручная сегментация для исправления ошибок, (5) морфологический оператор и выбор процесса для предварительной обработки и (6) идеализированные трехмерные графические реконструкции сегментированных культур. Хотя желательно, чтобы программное обеспечение достигало 100% точности без вмешательства пользователя, редактирование под управлением программного обеспечения позволяет быстро корректировать или корректировать параметры и результаты сегментации. ( Программа доступна по запросу авторам ).
Рисунок 6. Иллюстрация программных средств . Алгоритмы сегментации были интегрированы в графический пользовательский интерфейс (GUI) для облегчения визуальной обратной связи, выбора параметров и программного исправления ошибок. (A) Границы сегментации (белые) проецируются на отдельные кадры в z-стеке (не показанная полоса прокрутки используется для переключения между кадрами). Данные сегментации, включая идентификационный номер ячейки, площадь и диаметр (белый прямоугольник), отображаются для выбранной ячейки. (B) Потенциальные ошибки сегментации автоматически помечаются красным цветом. (C) Применяемая пользователем команда мыши указывает программному обеспечению выполнить операцию слияния. Синие пиксели обрисовывают объект в смежном вперед z-срезе/кадре, который связан с объединенной ячейкой. (Серые пиксели, не показанные, указывают на связанные объекты в предыдущем кадре). Изображения были сделаны в 20×.
Программное исправление ошибок
Во время процедуры слияния трехмерных изображений была создана база данных для каталогизации информации о каждой ячейке, включая ее геометрические свойства (такие как эксцентриситет и вогнутость) и координаты пикселей. Преимущества базы данных были двоякими: (1) она предоставляла ценную статистику и информацию о сегментированных клетках, и (2) она была полезна для быстрой визуальной обратной связи и корректировок под руководством пользователя. Индексы, соответствующие границам сегментированных объектов, проецировались на исходные двумерные изображения в z-стеке. Пользователь проверял изображения, прокручивая каждый двумерный z-срез/кадр, чтобы наблюдать границы сегментации. Чтобы ускорить ручное редактирование, конфликты, обнаруженные во время слияния трехмерных изображений, были помечены (красными пикселями), чтобы привлечь внимание к наиболее вероятным областям, требующим вмешательства пользователя. Мышь использовалась для отображения статистических данных о подозрительной или помеченной ячейке (например, идентификационный номер ячейки, площадь, эквивалентный диаметр), чтобы помочь оценить точность конкретной границы ячейки. После принятия решения о точности автоматизированной границы для ручного редактирования изображения использовались следующие команды мыши:
Щелчок левой кнопкой мыши: добавить/удалить ячейку в текущем двумерном кадре
Щелчок средней кнопкой мыши: объединить пересегментированные двухмерные ячейки
Щелчок правой кнопкой мыши (и удерживать): нарисовать границу ячейки вручную
Каждое исправление, добавление или удаление ячейки в 2-D z-срезе/кадре вызывал каскад процедур, которые управляли созданием, удалением, слиянием и разделением 3-D ячеек. Ячейки автоматически объединялись в 3D, если они удовлетворяли критериям взаимного перекрытия (как определено ранее). Линии сегментации для двумерных ячеек в соседних z-срезах, которые были объединены с выбранной пользователем ячейкой, были закодированы цветом и отображены в текущем z-срезе. Эти методы позволили пользователю уверенно добиться почти 100% точности за очень короткое время. Это особенно полезно в приложениях, где требуется высокоточная онлайновая сегментация и идентификация ячеек для оптического отслеживания сетевой активности.
Ручная сегментация с программным обеспечением
Тот же набор программных средств, который позволял выполнять автоматическую сегментацию с ручным редактированием по щелчку и исправлению, использовался для совершенно другого метода сегментации клеток: программной ручной сегментации. Для этого приложения были выполнены процедуры автоматической двухмерной сегментации (без процедур слияния трехмерных изображений) для записи индексов потенциальных клеток. Чтобы предотвратить смещение пользователя, визуальная обратная связь была подавлена, поскольку контур ячеек не отображался, и пользователь нажимал на отдельные ячейки в каждом двумерном кадре, чтобы указать, какие объекты являются ячейками. Индекс клика пользователя сравнивался с двумерной базой данных потенциальных ячеек; если совпадение было найдено, автоматически отображались границы сегментации потенциальной ячейки. Команды щелчка выбирали или отменяли выбор ячейки, предоставляли альтернативную (не основанную на водоразделе) границу сегментации или позволяли пользователю вручную сегментировать ячейку. Когда пользователь перемещался между z-срезами/кадрами, автоматически выполнялись трехмерные операции слияния и разделения, а также предоставлялась визуальная обратная связь для указания взаимосвязей ячеек между кадрами. Этот метод сегментации с помощью программного обеспечения позволил нам вручную создать набор тестовых изображений, с помощью которых можно было оценить наши автоматизированные процедуры. Для каждого оцениваемого изображения квалифицированные специалисты тщательно идентифицировали каждый клеточный объект как в 2-D, так и в 3-D.
Результаты
Процедуры сегментации были тщательно протестированы для оценки точности и надежности алгоритмов. Меры точности были достигнуты путем оценки эффективности алгоритмов как с процедурами исправления ошибок, так и без них. Кроме того, оценивалось влияние пользовательских смещений и применимость этих алгоритмов к ex vivo срезам мозга.
Количественная оценка
In Vitro Производительность Для оценки точности алгоритмов границы автоматизированной программной сегментации сравнивались с сегментацией вручную с помощью программного обеспечения. В частности, результаты автоматических процедур оценивались без трехмерного исправления ошибок, с трехмерным исправлением ошибок и после ручного исправления определенных программным обеспечением вероятных ошибок (ручное исправление разрешалось только в том случае, если программное обеспечение помечало потенциальную ошибку; в других случаях словами, ошибки, которые не были отмечены программным обеспечением, игнорировались). На каждом из этих этапов были достигнуты следующие параметры: (1) количество клеток, (2) пересчитанные клетки (т. е. количество ложноположительных клеток) и (3) пропущенные клетки (т. е. количество ложноотрицательных клеток). . Программно определяемые вероятные точки ошибок затем вручную оценивались опытными техническими специалистами, после чего предпринимались соответствующие действия (т. е. исправление или отсутствие исправления, хотя подавляющее большинство помеченных ошибок требовало исправления). Параметры количественной оценки программного обеспечения (например, пороговое значение площади, α и процент трехмерного перекрытия, β) были эмпирически оптимизированы только для одного стека изображений на каждом уровне, таким образом, одни и те же настройки поддерживались на каждом уровне, чтобы продемонстрировать надежность системы ( например, выходные данные были одинаковыми для разных образцов для заданного набора параметров). Этот многоуровневый анализ позволил оценить ценность сегментации соматов и нейритов, коррекцию трехмерной контекстной сегментации и проверку пользователя с помощью программного обеспечения, что значительно уменьшило ошибку и повысило точность рутинных результатов (рис. 7 и таблица 2).
Рисунок 7. Сводка результатов . Общий процент ошибок, определяемый как количество ложноположительных подсчетов плюс количество ложноотрицательных подсчетов по сравнению с фактическим количеством клеток, был рассчитан для уровней с первого по третий (сферическая морфология с увеличением уровня роста нейритов) и четвертого уровня ( сложная морфология с высоким ростом нейритов). Двусторонние повторные измерения ANOVA показали, что общая ошибка была уменьшена благодаря наличию автоматической коррекции ошибок ( p < 0,001) и дополнительно уменьшалась за счет коррекции выявленных программным обеспечением точек вероятной ошибки ( p < 0,05). Апостериорные попарные сравнения Tukey с выявили значительное уменьшение ошибок на уровнях со второго по четвертый; звездочки обозначают значительное снижение общего процента ошибок по сравнению с «до автоматического исправления ошибок» на каждом уровне (* p < 0,05; ** p < 0,01; *** p < 0,001).
Таблица 2. Результаты .
Полностью автоматизированный и скорректированный пользователем количественный анализ сравнивали с подсчетом клеток, полученным вручную, чтобы оценить общую точность и источники ошибок программного обеспечения. Результаты сведены в таблицу 2, в которой показаны необработанные подсчеты для различных точек подпрограммы в дополнение к ложноположительным и ложноотрицательным подсчетам (включая процент ошибок). Анализ общего процента ошибок (на основе ложноположительных ячеек плюс ложноотрицательных ячеек) оказался чувствительной мерой производительности программного обеспечения. Было обнаружено, что общий процент ошибок существенно зависит от уровня клеточной культуры ( p < 0,05) и подпрограммной точки ( p < 0,001), при отсутствии взаимодействия между этими факторами. В целом, применение трехмерной коррекции ошибок значительно снизило общий процент ошибок (90 324 p 90 325 < 0,001 для каждого). Было отмечено дополнительное значительное снижение общего процента ошибок, когда применялась программная коррекция ошибок после автоматической трехмерной коррекции ошибок (90 324 p 90 325 < 0,05). Попарные сравнения в пределах четырех уровней клеточных культур ясно продемонстрировали важность трехмерной сегментации и исправления ошибок по мере увеличения сложности культуры (рис. 7). Однако такие методы анализа не привели к значительному улучшению результатов в относительно простых образцах (уровень 1), где соматы имеют сферическую морфологию и имеют мало отростков или вообще не имеют их.
Чувствительность к пользовательским параметрам
Чтобы исследовать влияние выбора параметра на точность процедуры сегментации, мы исследовали ошибку подсчета клеток как функцию критерия классификации области, α, и порога интенсивности, T, для уровня 2 тестовое изображение. Пороговое значение площади было нормализовано на одно стандартное отклонение меньше, чем среднее значение для тел клеток [т. е. 100% = Среднее (тела клеток) — StdDev (тела клеток)], а параметр менялся от 15 до 100%. Порог интенсивности менялся от 35 до 100% от максимальной интенсивности пикселей. Ошибка была определена как процентное отклонение автоматизированного подсчета клеток от «золотого стандарта» подсчета клеток и была представлена в виде таблицы для алгоритмов сегментации, работающих как с автоматической трехмерной коррекцией ошибок, так и без нее.
На рисунке 8 ошибка показана как функция определяемых пользователем параметров, α и T (пунктирная рамка указывает параметры, которые, скорее всего, будут выбраны вручную на основе обратной связи гистограммы, предоставленной программным обеспечением, например, см. рисунок 4). ). В целом автоматический подсчет клеток увеличивался по мере снижения порогов. Таким образом, в случае без 3-D коррекции ошибок количество клеток было искусственно завышено за счет более низкого порога и включения сверхсегментированных фрагментов сомат и нейритов, что было скорректировано в случае с 3-D коррекцией ошибок. Рисунок 8 демонстрирует, что использование трехмерного контекста для выявления и исправления ошибок сегментации создает гораздо более надежное и устойчивое пространство параметров, с помощью которого можно получить точные результаты подсчета клеток. Таким образом, существует большая погрешность при выборе параметров, и будущие версии программного обеспечения могут быть способны автоматизировать выбор параметров.
Рисунок 8. Чувствительность к пользовательским параметрам . Ошибка подсчета клеток как функция α и T с (A) и без (B) Трехмерная коррекция ошибок. Пунктирная рамка указывает параметры, которые оператор, вероятно, выберет на основе данных гистограммы из программного обеспечения. В (A) область ошибки 5% занимает 44% отображаемого пространства параметров; напротив, та же область ошибки занимает только 18% (B) . Удаление сегментов нейритов и слияние сверхсегментированных сомат в (A) учитывает пониженную чувствительность к пользовательским параметрам.
Проверка эффективности на срезах мозга
Помимо трехмерных культур in vitro , алгоритмы обработки изображений также применялись к трехмерным срезам мозга ex vivo . В качестве демонстрации надежности системы алгоритмы были протестированы на конфокальных z-стеках, полученных из культур срезов коры головного мозга. Мы выбрали образцы с различной плотностью жизнеспособных клеток, от относительно низкой до высокой плотности (рис. 9).). Протестированные z-стеки также варьировались в зависимости от диапазона морфологии и контраста характеристик клеток (например, пиксели клеток варьировались от относительно тусклых, низкой интенсивности до насыщенных, высокой интенсивности). За исключением глобального порога интенсивности T, пользовательские параметры были идентичны для этих двух наборов изображений (α = 50, β = 0,15, T A = 60%, T B = 95%). Следуя тем же протоколам, которые были определены для культур in vitro , программное обеспечение достигло точности 93 и 97% для z-стеков с низкой и высокой плотностью клеток соответственно.
Рисунок 9. Демонстрация надежности системы: сегментация сомы в ex vivo мозговой ткани . Пользовательские алгоритмы трехмерной сегментации были применены к z-стекам, полученным в результате конфокальной визуализации срезов головного мозга из коры головного мозга. Тестируемые z-стеки варьировались в зависимости от плотности жизнеспособных клеток: от относительно низкой (A) до высокой (B) плотности. Следуя тому же протоколу тестирования in vitro , алгоритмы достигли точности 93% (A) и 97% (B) (α = 50, β = 0,15, T A = 60%, T B = 95%). Изображения были сделаны в 40×. (Вставка) Белые пиксели обозначают границы сомы для одного среза в z-стеке. Масштабная линейка = 20 мкм.
Обсуждение
Мы продемонстрировали новые методологии для систематической и непредвзятой идентификации нервных клеток, распределенных по толщине трехмерной ткани или конструкций in vitro. Мы использовали новые функции, в том числе классификацию нейритов/сом, идентификацию ошибок трехмерного слияния и сегментации, а также программную проверку пользователя, чтобы добиться высокоточной идентификации границ клеток в широком диапазоне морфологических сложностей культур. Этот набор инструментов заполняет пробел между автоматизированными процедурами сегментации для многоклеточных 9Изображения ядер 0324 (без нервных процессов) и изображения одноклеточных (или низкой плотности) с богатыми морфологическими деталями. Кроме того, этот набор инструментов позволяет пользователям быстро вносить ручные исправления с помощью компьютера в базу данных автоматизированной сегментации, что особенно привлекательно, когда во время живого эксперимента необходимо выполнить высокоточные оценки местоположения клеточных тел (например, оптическое отслеживание сетевой активности с использованием Ca). 2+ -чувствительные красители). Мы дополнительно проверили эти инструменты, используя комплексное приложение количественной оценки нервных клеток в ex vivo срезы головного мозга. Кроме того, мы продемонстрировали, что наши алгоритмы используют повышенную сложность, присущую трехмерным системам, в качестве эффективного средства минимизации ошибок количественного определения путем применения богатого набора пространственных данных для автоматического исправления ошибок сегментации. В совокупности эти методы улучшают объем и эффективность автоматизированного нейроспецифического анализа без ущерба для точности за счет идентификации соматов нейронов в трехмерных тканях или суррогатных тканях в z-стеках с сохранением данных о морфологии/связности. Эта новая платформа для анализа трехмерных изображений предлагает нейронным инженерам и нейробиологам ценный набор инструментов для анализа нервной ткани или суррогатов тканей в трехмерном контексте, подходящих для изучения межклеточных взаимодействий и межклеточных взаимодействий между клетками и внеклеточным матриксом.
В то время как простые морфологии, подобные соматическому или ядерному окрашиванию, не требовали новых методов исправления ошибок, значительное повышение точности для сложных нейробиологических примеров подчеркивает преимущества этого набора инструментов. Хотя существуют и другие варианты, им не хватает возможностей этого набора инструментов, а именно возможности исследовать сложные нейробиологические примеры с соматами и нейритами с помощью одного флуоресцентного маркера (Bjornsson et al. , 2008; Luisi et al., 2011; Latorre et al., 2013). . Мы проверили эти инструменты в конкретном применении автоматизированной сегментации соматов нейронов с плотной разветвленностью нейритов в трехмерных конструкциях. Несмотря на консервативную схему проверки, алгоритмы показали себя очень хорошо для множества тестовых изображений с точностью ≥ 95% в широком диапазоне сложностей морфологической культуры. Точно так же на срезах мозга мы провели проверку концепции алгоритмов с точностью> 90%. Удивительно, что срез с более низкой плотностью имел более низкую точность, но изображение могло иметь более слабый сигнал для некоторых клеток и нейритов большого размера, что могло способствовать небольшому снижению точности. Поскольку мы запустили алгоритм только на двух образцах ex vivo , мы не можем определить, работает ли алгоритм лучше на срезах с более высокой плотностью. В процессе проверки пользователям не разрешалось исправлять непомеченные ошибки, которые в противном случае были бы очевидны для исследователя. Таким образом, точность представленных алгоритмов должна приближаться к 100% в практических приложениях.
Мы решили проблему выбора параметров, приняв меры для обеспечения относительной простоты настройки параметров процесса. Эмпирически полученные переменные оператора, которые повлияли на производительность процедур сегментации, включали (1) пороговое значение интенсивности пикселей, T, (2) пороговое значение площади сомы/нейрита, α, и (3) процент перекрытия трехмерного слияния, β. Параметры площади и интенсивности, α и T соответственно, были назначены на основе гистограмм, сгенерированных программным обеспечением. Процент перекрытия, β, использовался в основном для определения чувствительности программного обеспечения к ошибкам сегментации. Хотя тщательная настройка параметров, безусловно, улучшила производительность, точность программного обеспечения была относительно устойчива к изменениям этих параметров (как показано на рисунке 8). Таким образом, необходимо было настроить параметры только для одного z-стека в каждой категории тестов.
Одной из проблем сегментации изображений является определение метрики для классификации объектов. Чтобы оптимизировать производительность (скорость и точность), мы решили различать фрагменты нейритов и соматы, используя очень простой критерий — площадь объекта в пикселях. Хотя в прошлом сообщалось о пороговых значениях площади для разделения 90 324 ядер 90 325 от 90 324 артефактов 90 325 (Adiga and Chaudhuri, 2000), мы показали, что сегментация водосбора создает граничные области с заметно различающимися популяциями для нейриты и соматы . Несмотря на эффективность этого метода, неизбежно исключались некоторые объекты тела клетки, в то время как некоторые фрагменты нейритов включались. Алгоритмы трехмерного слияния практически устранили эту проблему. Например, объекты, которые появлялись только на одном z-срезе, считались артефактами или фрагментами нейритов и удалялись. Кроме того, исключение клеточных тел (ложноотрицательные результаты) обычно происходило вблизи окончания клеток по оси z, где клетка имела очень маленький 2-мерный диаметр; в этом случае ячейка обычно была представлена в соседних z-срезах, где конфокальные срезы захватывали большую двумерную перспективу клетки (в нашем приложении типичная ячейка занимала от 3 до 6 z-срезов, хотя это будет функция параметров конфокальной микроскопии).
Мы разработали новые методы объединения двухмерных объектов с трехмерными somata и выявления ошибок двухмерной сегментации. Эти методы улучшают предыдущие методы (Irinopoulou et al., 1997; Belien et al., 2002) для слияния 2-D объектов в 3-D ядра . В частности, мы ввели (1) критерии для оценки слияния клеток с нескольких точек зрения и (2) методы для выявления потенциальных ошибок сегментации. Предыдущие методы учитывали только прямую проекцию двумерных ядер на соседние z-срезы и не могли распознавать ошибки двухмерной сегментации, что открывало возможность для большего количества ошибок без средств их идентификации (Umesh Adiga and Chaudhuri, 19).99). Одной из новых особенностей нашей стратегии слияния 2-D в 3-D является то, что она идентифицирует как ложноположительные (пересегментированные объекты), так и ложноотрицательные (недосегментированные объекты) путем оценки слияния ячеек с нескольких точек обзора. Предыдущие методы должны были запускать несколько алгоритмов для выполнения определенных слияний ячеек, и им не хватало возможностей проверки пользователем для устранения оставшихся ошибок в диапазоне от 5 до 8% (Latorre et al. , 2013).
В будущем мы планируем внести улучшения в алгоритм слияния. Хотя наш алгоритм идентифицирует как ложноположительные, так и ложноотрицательные результаты, у нас нет ни метода, позволяющего различать эти типы ошибок, ни процедур для «разделения» недостаточно сегментированных ячеек. Кроме того, мы использовали только два z-среза, чтобы определить, следует ли объединять смежные 2D-объекты и каким образом. В будущем было бы полезно использовать информацию от всех перекрывающихся двумерных объектов (которые обычно пересекают 3 или более z-срезов) для принятия арбитражных решений о типе ошибки (ложноположительный, ложноотрицательный) и соответствующем действии (объединение, расколоть). Один из подходов может использовать геометрическую статистику из локальных (только перекрывающиеся объекты) и глобальных (все двумерные объекты) границ сегментации вместе с эмпирически полученной функцией стоимости, чтобы облегчить принятие решений о слиянии и разделении. Метод применения функции стоимости для принятия арбитражных решений о слиянии был продемонстрирован с большим успехом (Lin et al. , 2003). Интегрировав этот подход в наши процедуры слияния, мы могли автоматически исправлять перегрузки.Соматы 0324 и недостаточно сегментированы, поэтому требуется меньше ручного ввода с помощью программного обеспечения.
Будущие расширения этого программного обеспечения могут оказаться полезными при работе со сложными приложениями анализа изображений, специфичными для нейронов, где требуются эффективные и точные автоматизированные процедуры. Например, наши алгоритмы коррекции трехмерной контекстной сегментации могут повысить эффективность и точность анализа систем с повышенной плотностью меченых клеток (например, плотные области коры головного мозга или плотные нейронных конструкций in vitro ) или оценку трехмерной совместной локализации нескольких флуоресцентных меток. Кроме того, хотя представленные методы использовались исключительно для каталогизации информации о соматах, исследователи могут использовать знания о границах тел клеток для облегчения дополнительных морфологических анализов, таких как количественная оценка пространственной протяженности и объема отростков нейритов. Такой детальный анализ, основанный на геометрии и связности клеток, особенно актуален для нейробиологических приложений, но, очевидно, невозможен исключительно на основе традиционного ядерного окрашивания. Например, ранее были отмечены специфичные для нейронов морфофункциональные взаимосвязи, в том числе то, что электрофизиологические и/или мембранные свойства коррелируют с геометрическими параметрами, такими как объем и площадь поверхности. Кроме того, было показано, что увеличение соматического объема коррелирует с повышенной сложностью дендритов и увеличением аксонов, в то время как количество синаптических сайтов остается довольно постоянным вдоль дендритов и аксонов (Gutierrez-Ospina et al., 2004; Seeger et al., 2005). Таким образом, измерения соматического/нейритного объема могут сильно коррелировать с количеством синапсов на нейрон. Кроме того, точки невритико-невритических или невритико-соматических соединений могут быть идентифицированы морфологически как сайты потенциальных синапсов для картографирования сети.
Представленная здесь работа является важным шагом на пути к нашей долгосрочной цели по разработке алгоритмов, позволяющих проводить автоматизированный анализ в реальном времени, включая временной анализ в трех пространственных измерениях. Примечательно, что недавно мы начали использовать следующее поколение этих методов для отслеживания функциональных нейронных сетей путем оценки относительной интенсивности флуоресценции и распространения сигнала с использованием красителей, чувствительных к напряжению или ионам, в нейронных культурах. Очевидно, что для этого приложения данные, относящиеся к полной морфологии нейронов и связности сети в соответствующих пространственных измерениях, имеют решающее значение. В конечном счете, при дальнейшем развитии эти методы могут привести к возможности автоматизированного четырехмерного анализа в реальном времени функциональности ансамблевой электрофизиологической сети и распространения сигнала по нервной ткани или конструкциям.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы благодарят г-на Чинтана Пателя за его ценные отзывы о программном обеспечении и за помощь в создании базы данных тестовых изображений. Кроме того, авторы хотели бы поблагодарить доктора Оскара Скриняра и мистера Эдгара Брауна за их проницательные обсуждения обработки изображений и реализации алгоритмов. Национальные институты здравоохранения поддержали это исследование через Партнерство по исследованиям в области биоинженерии (награда № EB00786-01) и грант на институциональное обучение (награда № T32-NS043126). Пользовательский код Matlab, представленный здесь, доступен по запросу.
Ссылки
Adiga, P.S.U., and Chaudhuri, B.B. (2000). Методы сегментации объемных гистопатологических изображений на основе областей. Вычисл. Методы Программы Биомед . 61, 23–47. doi: 10.1016/S0169-2607(99)00026-7
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Adiga, PSU, and Chaudhuri, BB (2001). Эффективный метод, основанный на объединении водоразделов и правил для сегментации трехмерных гистопатологических изображений. Распознавание образов . 34, 1449–1458. doi: 10.1016/S0031-3203(00)00076-5
Полный текст CrossRef | Google Scholar
Аль-Кофахи К.А., Джан А., Ласек С., Шаровски Д.Х., Доуэлл-Месфин Н., Шайн В. и др. (2003). Надежные алгоритмы на основе медианы для отслеживания нейронов на зашумленных изображениях конфокальной микроскопии. IEEE Trans. Инф. Технол. Биомед . 7, 302–317. doi: 10.1109/TITB.2003.816564
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Аль-Кофахи К.А., Ласек С., Шаровски Д.Х., Пейс С.Дж., Наги Г., Тернер Дж.Н. и др. (2002). Быстрое автоматизированное трехмерное отслеживание нейронов из стеков конфокальных изображений. IEEE Trans. Инф. Технол. Биомед . 6, 171–187. doi: 10.1109/TITB.2002.1006304
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Belien, JAM, van Ginkel, H., Tekola, P., Ploeger, L.S., Poulin, NM, and van Diest, PJ (2002). Конфокальная ДНК-цитометрия: алгоритм сегментации на основе контуров для автоматической сегментации трехмерных изображений. Цитометрия 49, 12–21. doi: 10.1002/cyto.10138
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Бьорнссон, К.С., Лин, Г., Аль-Кофахи, Ю., Нараянасвами, А., Смит, К.Л., Шаин, В., и др. (2008). Ассоциативный анализ изображений: метод автоматической количественной оценки трехмерных многопараметрических изображений ткани головного мозга. J. Neurosci. Методы 170, 165–178. doi: 10.1016/j.jneumeth.2007.12.024
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Чавла М.К., Лин Г., Олсон К., Ваздарьянова А., Берк С.Н., Макнотон Б.Л. и др. (2004). 3D-catFISH: система для автоматизированного количественного трехмерного компартментального анализа активности транскрипции временных генов, визуализируемая флуоресценцией гибридизация in situ . J. Neurosci. Методы 139, 13–24. doi: 10.1016/j.jneumeth.2004.04.017
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Креспо, Дж. , и Маойо, В. (1999). «Сохранение формы при морфологической фильтрации и сегментации», в Компьютерная графика и обработка изображений, 1999 г. Труды. XII Бразильский симпозиум по (Кампинас: IEEE), 247–256.
Google Scholar
Каллен Д.К. и Лаплака М.К. (2006). Реакция нейронов на высокоскоростную сдвиговую деформацию зависит от неоднородности локального поля деформации. Дж. Нейротравма 23, 1304–1319. doi: 10.1089/neu.2006.23.1304
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Каллен Д.К., Лессинг М.К. и Лаплака М.К. (2007). Коллаген-зависимый рост нейритов и реакция на динамическую деформацию в трехмерных культурах нейронов. Энн. Биомед. Eng . 35, 835–846. doi: 10.1007/s10439-007-9292-z
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Каллен Д. К., Вольф Дж. А., Вернекар В. Н., Вукасинович Дж. и Лаплака М. К. (2011). Инженерия нервной ткани и биогибридные микросистемы для нейробиологических исследований in vitro (часть 1). Крит. Преподобный Биомед. Eng . 39, 201–240. doi: 10.1615/CritRevBiomedEng.v39.i3.30
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Гобель В., Кампа Б. М. и Хельмхен Ф. (2007). Отображение динамики сотовой сети в трех измерениях с использованием быстрого трехмерного лазерного сканирования. Нац. Методы 4, 73–79. doi: 10.1038/nmeth989
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Гонсалес, Р. К., и Вудс, Р. Э. (2002). Цифровая обработка изображений, 2-е издание . Нью-Джерси, Нью-Джерси: Прентис Холл.
Гутьеррес-Оспина Г., Урибе-Квероль Э., Санчес Н., Джованнини Х., Падилья П. и Эрнандес-Эчеагарай Э. (2004). Сходная плотность синапсов в столбцах слоя IV первичной соматосенсорной коры трансгенных мышей с разным размером мозга: последствия для механизмов, лежащих в основе дифференциального распределения коркового пространства. Поведение мозга. Эвол . 64, 61–69. doi: 10.1159/000079116
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Хопкинс, А. М., Десимоне, Э., Чвалек, К., и Каплан, Д. Л. (2015). 3D-моделирование in vitro центральной нервной системы. Прог. Нейробиол . 125, 1–25. doi: 10.1016/j.pneurobio.2014.11.003
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Иринопулу Т., Васси Дж., Бейл М., Николопулу П., Энкауа Д. и Риго Дж. П. (1997). Трехмерная цитометрия изображения ДНК с помощью конфокальной сканирующей лазерной микроскопии в блоках толстой ткани поражений предстательной железы. Цитометрия 27, 99–105.
Реферат PubMed | Google Scholar
Кох И.Ю., Линдквист В.Б., Зито К., Нимчинский Э.А. и Свобода К. (2002). Алгоритм анализа изображений для дендритных шипиков. Нейронные вычисления . 14, 1283–1310. doi: 10.1162/089976602753712945
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Кумар, Дж., и Шунмугам, М.С. (2006). Морфологические операции на инженерных поверхностях с использованием элемента 3D-структурирования соответствующего размера. Изм. науч. Технол . 17, 2655–2664. doi: 10.1088/0957-0233/17/10/018
CrossRef Full Text | Google Scholar
Латорре А., Алонсо-Нанкларес Л., Муэлас С., Пеоа Ж.-М. и Дефелипе Ж. (2013). Трехмерные сегментации ядер нейронов из стеков изображений конфокального микроскопа. Фронт. Нейроанат . 7:49. doi: 10.3389/fnana.2013.00049
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Лин Г., Адига У., Олсон К., Гузовски Дж. Ф., Барнс К. А. и Ройсам Б. (2003). Гибридный трехмерный алгоритм водораздела, включающий признаки градиента и модели объектов для автоматической сегментации ядер в стеках конфокальных изображений. Цитометрия А 56, 23–36. doi: 10.1002/cyto.a.10079
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Лин Г., Чавла М. К., Олсон К., Гузовски Дж. Ф., Барнс К. А. и Ройсам Б. (2005a). Иерархическое объединение нескольких фрагментов на основе модели для улучшения трехмерной сегментации ядер. Цитометрия А 63, 20–33. doi: 10.1002/cyto.a.20099
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Lin, P.W., Wu, C.C., Chen, CH, Ho, HO, Chen, YC, and Sheu, MT (2005b). Характеристика роста корковых нейронов в двух- и трехмерных культуральных системах. Ж. Биомед. Матер. Рез. Б заявл. Биоматер . 75Б, 146–157. doi: 10.1002/jbm.b.30276
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Луизи Дж., Нараянасвами А., Гэлбрет З. и Ройсам Б. (2011). Редактор трасс FARSIGHT: инструмент с открытым исходным кодом для трехмерного исследования и эффективного анализа паттернов, помогающий редактировать автоматизированные реконструкции нейронов. Нейроинформатика 9, 305–315. doi: 10.1007/s12021-011-9115-0
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Мейеринг Э., Джейкоб М., Сарриа Дж. К. Ф., Штайнер П., Хирлинг Х. и Унсер М. (2004). Разработка и проверка инструмента для отслеживания и анализа нейритов на изображениях флуоресцентной микроскопии. Цитометрия Часть A 58A, 167–176. doi: 10.1002/cyto.a.20022
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Сарти А., Де Солорзано К.О., Локетт С. и Маллади Р. (2000). Геометрическая модель для анализа трехмерных конфокальных изображений. IEEE Trans. Биомед. анг . 47, 1600–1609. doi: 10.1109/10.887941
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Сигер Г., Гартнер У. и Арендт Т. (2005). Трансгенная активация Ras в нейронах увеличивает образование синапсов в неокортексе мыши. Дж. Нейрал. КПП . 112, 751–761. doi: 10.1007/s00702-004-0226-8
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Солорзано К.О., Родригес Э.Г., Джонс А., Пинкель Д., Грей Дж.В., Судар Д. и др. (1999). Сегментация изображений конфокальной микроскопии ядер клеток в срезах толстой ткани. Дж. Микроск . 193, 212–226. doi: 10.1046/j.1365-2818.1999.00463.x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Стосек К. , Гаращук О., Холтофф К. и Коннерт А. (2003). In vivo двухфотонная кальциевая визуализация нейронных сетей. Проц. Натл. акад. науч. США . 100, 7319–7324. doi: 10.1073/pnas.1232232100
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Салливан М.Р., Ниммерьян А., Саркисов Д.В., Хельмхен Ф. и Ван С.С.Х. (2005). In vivo кальциевая визуализация активности цепи в коре мозжечка. Дж. Нейрофизиол . 94, 1636–1644. doi: 10.1152/jn.01013.2004
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Текола П., Баак Дж. П. А., ван Гинкель Х., Белиен Дж. А. М., ван Дайст П. Дж., Брокерт М. А. и др. (1996). Трехмерная конфокальная лазерная сканирующая ДНК-плоидная цитометрия в толстых гистологических срезах. Дж. Патол . 180, 214–222.
Реферат PubMed | Google Scholar
Умеш Адига, BBC (2001). Эффективный метод, основанный на объединении водоразделов и правил для сегментации трехмерных гистопатологических изображений.