Как мы создавали третье поколение роботов-курьеров — Блог Яндекса
Блог Яндекса
17 ноября 2021, 17:00
Первые роботы-курьеры Яндекса появились на улицах в ноябре 2019 года. За два года они доставили десятки тысяч заказов по всему миру. Они работали в морозную зиму и жаркое лето, проезжали по пустынным тротуарам во время пандемии и пробирались сквозь переполненные улицы в час пик.
Мы хотим, чтобы наши разработки одинаково хорошо работали в любой точке мира. Поэтому мы используем роверы в самых разных условиях и наблюдаем, как они себя ведут, — это позволяет понять, как сделать роботов ещё лучше.
Сейчас на улицы выходит уже третье поколение роботов-курьеров. В этом посте мы расскажем о процессе создания нового ровера: от разработки концепта до финальных испытаний.
Создание концепта и новые решения
Новый ровер сообща разрабатывают сразу несколько команд. Команды, которые каждый день взаимодействуют с роботами и теми, кто их использует, высказывают пожелания, что можно улучшить. Инженеры и разработчики предлагают, как доработать сенсоры и вычислительную часть. Своими идеями также делятся дизайнеры и конструкторы.
Инженеры и разработчики предлагают, как доработать сенсоры и вычислительную часть. Своими идеями также делятся дизайнеры и конструкторы.
Когда мнения собраны, начинается работа над проектом. Дизайнер показывает предварительный концепт, а на его основе инженеры создают детализированную 3D-модель и проверяют, можно ли корректно расположить компоненты в придуманном варианте корпуса.
Затем проект ещё раз обсуждают и вносят доработки — например, чтобы упростить обслуживание робота или повысить надёжность тех или иных узлов.
Варианты конструкции крышки. Для нового поколения выбрали вариант слева, где петля для надёжности интегрирована в крышкуЧто мы улучшили
Одним из пожеланий к новому поколению роверов было сделать изображение с камер и лидара более детальным.
У третьего поколения роботов новый лидар — он расположен в передней части корпуса и слегка наклонён вперёд. У него шире угол обзора по вертикали, а число испускаемых лучей увеличилось с 16 до 64. За счёт этого робот лучше видит близкие объекты.
За счёт этого робот лучше видит близкие объекты.
Также ровер оснастили новыми камерами с углом обзора больше 180 градусов. Под лидаром появилась дополнительная камера с большим фокусным расстоянием. Она помогает роботу отчётливо видеть светофоры на противоположной стороне даже очень широкой дороги.
Дизайнеры и конструкторы предложили сделать робота менее округлым. За счет прямоугольной формы получилось увеличить полезный объём грузового отсека. Например, теперь в него помещаются пятилитровые бутыли воды, которые часто заказывают в магазинах. При этом размеры робота практически не изменились.
Поиск баланса между высотой отсека и углом обзора лидараНовый ровер сможет перевозить в 60-литровом отсеке до 20 кг груза — к примеру, шесть 40-сантиметровых пицц и четыре двухлитровые бутылки газировки. В робота второго поколения помещается пять пицц без газировки.
Чтобы ровер мог работать практически без перерывов, конструкторы оснастили его съёмной батареей. Теперь ему не нужно брать паузу для зарядки — замена севшего аккумулятора на свежий занимает меньше минуты. Когда аккумулятор снят, ровер питается от небольшой резервной батареи.
Когда аккумулятор снят, ровер питается от небольшой резервной батареи.
Подвеска третьего поколения стала мягче. Теперь роботам легче забираться на высокие бордюры, ездить по бездорожью, преодолевать снежную кашу и другие сложные участки пути. А заодно они стали тише передвигаться по плитке, брусчатке и на съездах с бордюров.
Роботы-курьеры постепенно становятся частью городской среды, и мы хотим, чтобы они органично в неё вписывались. Поэтому у роверов третьего поколения не такая броская расцветка, как у их предшественников. При этом их лучше видно в темноте — теперь у них есть светодиодные фары.
Производство и тестирование
Мы сами разрабатываем большинство элементов для роботов, включая камеры, парктроники, платы, корпуса, шины, металлические элементы конструкции и другие компоненты. И тщательно проверяем их перед запуском в производство.
Для каждой детали есть отдельный испытательный стенд. Например, подвеску перед выездом в город проверяют на установке, которая называется шейкер. Робота устанавливают на стенд и запускают. Вращение колёс приводит в движение колёсики шейкера — они воспроизводят езду по неровной поверхности со скоростью 7,2 км/ч.
Робота устанавливают на стенд и запускают. Вращение колёс приводит в движение колёсики шейкера — они воспроизводят езду по неровной поверхности со скоростью 7,2 км/ч.
Два дня испытаний на шейкере дают такую же нагрузку на подвеску, как две недели работы в городе или 350 км реальных дорог.
Испытание подвески на шейкере — этот этап предшествует дорожным испытаниямНа надёжность проверяются все важные узлы ровера. Для этого у нас есть специальные машины. Они открывают и закрывают крышку отсека или подключают и отключают контакты — и делают это по две тысячи раз подряд.
Проверка контактов на износНекоторые детали мы тестируем на предыдущем поколении робота. Это позволяет проверить их в реальных условиях и исправить недочёты ещё до того, как будет готов первый прототип. Например, на роверах второго поколения проверяли новую подвеску — и она так хорошо себя показала, что мы решили установить её на всех роботах, которые сейчас доставляют заказы.
Как и автомобилям, роботам нужны летние и зимние шины. На рынке подходящих нет, поэтому их тоже пришлось делать самим. Мы много экспериментировали — например, меняли рисунок и глубину протектора — и к появлению новых роботов нашли самые удачные варианты. Они уже опробованы на роверах второго поколения и теперь будут выпускаться серийно.
На рынке подходящих нет, поэтому их тоже пришлось делать самим. Мы много экспериментировали — например, меняли рисунок и глубину протектора — и к появлению новых роботов нашли самые удачные варианты. Они уже опробованы на роверах второго поколения и теперь будут выпускаться серийно.
Печатные платы, камеры и другие компоненты и узлы мы дополнительно проверяем в термокамере. Они должны выдержать работу в диапазоне от −40 до +60°С, ведь роботы-курьеры доставляют заказы круглый год — как в суровую зиму, так и под палящим солнцем.
Компоненты проходят ещё одно важное испытание — на герметичность. Раньше мы покрывали печатные платы лаком, но опыт доставки в разных странах показал, что этого недостаточно. Поэтому у новых роботов все платы спрятаны в специальные кожухи. Их водонепроницаемость проверяется на испытательных стендах.
Испытания на полигоне
Готовый прототип отправляется на наш испытательный полигон. Сначала ровер просто ездит по кругу, чтобы мы могли проверить надёжность сборки и подключение контактов. Обычно достаточно дня непрерывной работы, чтобы отловить возможные неполадки.
Обычно достаточно дня непрерывной работы, чтобы отловить возможные неполадки.
После теста на надёжность роботы должны пройти полосу препятствий. Они объезжают бетонные блоки, входят в резкие повороты, лавируют между разбросанными скейтбордами и преодолевают другие сложности, которые могут встретиться в пути.
Роверы третьего поколения проходили испытания летом, когда в центральной части России стояла 35-градусная жара. Но мы также хотели проверить поведение новой подвески на снегу. Для этого создали специальную площадку с искусственным снегом и сравнили подвески разных поколений. Проходимость роверов с новой подвеской оказалась лучше: они без проблем проезжали там, где другие буксовали.
Тесты в городе
После испытаний на полигоне ровер начинает работу в городе. Сначала он выполняет виртуальные доставки — инженеры отправляют роботов по реальным адресам без нагрузки. Так мы можем ещё раз убедиться в надёжности компонентов, оценить работу новых сенсоров в сложных условиях и собрать данные для улучшения алгоритмов.
Сначала он выполняет виртуальные доставки — инженеры отправляют роботов по реальным адресам без нагрузки. Так мы можем ещё раз убедиться в надёжности компонентов, оценить работу новых сенсоров в сложных условиях и собрать данные для улучшения алгоритмов.
После недели виртуальных тестов ровер нового поколения готов выполнять настоящие заказы, а мы начинаем массовую сборку обновлённых роботов.
Новые роботы уже доставляют заказы жителям Москвы и Иннополиса и студентам американских вузов. Сначала они будут работать вместе со вторым поколением, но постепенно заменят предшественников. Мы ожидаем, что до конца года парк пополнит сотня новых роботов. Их ждут наши партнёры в разных городах и странах.
Работа над роверами никогда не останавливается — у нас большие планы и много интересных задач. Если вам тоже интересен беспилотный транспорт, приходите к нам. Мы ищем хороших разработчиков, инженеров, аналитиков и специалистов по машинному обучению — им предстоит совершенствовать технологию и создавать следующие поколения роботов.
беспилотники
СправкаВсе блоги сервисов© 2013–2022 «Яндекс»«Яндекс» выпустил своих роботов-доставщиков на улицы городов
Цифровизация Внедрения Техника
|
Поделиться
Робот-курьер от «Яндекса» тестируется на улицах
«Яндекс» начал тестировать беспилотную доставку из кафе и ресторанов в Москве и Иннополисе.
«Яндекс» полагает, что в будущем робот возьмет на себя часть заказов, которые сейчас развозят курьеры.
«Яндекс.ровер» — полуметровый робот-курьер для перевозки небольших грузов. Робот вмещает в себя до 20 кг. Компания начала его разработку летом 2019 г., а затем тестировала робота в своей штаб-квартире. Робот полностью автономен: сам планирует свой маршрут, оценивает ситуацию вокруг, объезжает препятствия и пропускает пешеходов и животных. Он способен ездить по городским тротуарам со скоростью около 5 км/ч, может работать и летом, и зимой, выполняя заказы в разных погодных условиях.
На местности дрон ориентируется при помощи комплекта камер и датчиков и размещенного на его «крыше» лидара. За счет его «ровер» может обходить препятствия, притом даже в темноте.
Как сообщили CNews в пресс-службе «Яндекса», во время движения робот определяет свое местоположение, идентифицирует и классифицирует объекты вокруг, прогнозирует, как будут действовать эти объекты в следующие несколько секунд, и планирует свои действия: «Робот может преодолевать невысокие бордюры и искусственные неровности дороги. Мы также тестируем сейчас новые конструкции шасси, которые позволят ему справляться с более сложным рельефом».
Мы также тестируем сейчас новые конструкции шасси, которые позволят ему справляться с более сложным рельефом».
Для того чтобы выбрать доставку роботом, нужно оформить заказ в приложении «Яндекс.еда», причем дополнительно доплачивать за вызов именно робота не нужно. «Ровер» заберет заказ из ресторана и привезёт к указанному подъезду. В приложении можно посмотреть статус заказа и местоположение «ровера». Для получения заказа получателю достаточно с помощью своего смартфона открыть крышку грузового отсека робота. Пока число роботов ограничено, если свободного робота не окажется, заказ привезёт курьер — они продолжат доставлять еду в этом районе.
Робот-доставщик «Яндекс.Ровер»
В 2019 г. в «Яндексе» говорили, что устройство получило имя «Яндекс.ровер» за сходство с луноходом — дрон перемещается по суше за счет вращения шести колес (в действительности название Lunar Rover Vehicle носил четырехколесный электромобиль американских астронавтов, на котором они ездили по Луне).
В Москве компания тестирует необычного курьера в районе делового квартала «Белая площадь» у метро «Белорусская». Там расположены крупные офисы российских и иностранных компаний, а также кафе и рестораны. «Ровер» возит заказы из ресторанов и кафе «Марукамэ», Steak it Easy, Boston Seafood & Bar, Prime, Paul и Cheese Connection. С подключением новых точек общественного питания зона беспилотной доставки будет расширяться.
Еще одно место обитания роботов-доставщиков — Иннополис под Казанью. Жители могут сделать заказ в ресторане и выбрать беспилотную доставку в приложении «Яндекс.еда» или в городском Telegram-боте. В дальнейшем, как планируют разработчики, они будут подключаться к другим задачам и помогать жителям с повседневными делами.
В ответ на вопрос CNews, как компания уберегает роботов от вандалов, представители «Яндекса» ответили, что местоположение каждого из роботов известно в компании, плюс, сам «ровер» может подать сигнал оператору, «если поймет, что что-то идет не так».
В Москве количество роботов может варьироваться в зависимости от динамики заказов в районе. В Иннополисе сейчас работает пять роботов, и в ближайшее время к ним присоединятся еще роботы для новых сценариев доставки, уточнили в пресс-службе.
Подробности разработки «Яндекс.ровера»
CNews писал, что для ориентации в пространстве «Яндекс.ровер» использует те же алгоритмы, что и в беспилотных автомобилях «Яндекса». Они были адаптированы для нового типа задач и немного других условий движения.
«Аскон» перешла с Cisco Webex на отечественный сервис для совещаний
Импортозамещение ВКС
Факт заимствования алгоритмов у автономных машин подтвердил и руководитель направления беспилотных автомобилей в «Яндексе» Дмитрий Полищук. «При создании «ровера» мы использовали наши наработки в области беспилотного управления. Мы адаптировали существующие технологии для новых задач и новой системы с другим набором сенсоров, так что разработка заняла меньше времени, чем если бы мы делали всё с нуля.
Со временем функциональность роботов расширят
Еще во время тестирования «Яндекс» рассказывал, что «Яндекс.роверы», помимо прочего, могут развозить документы от дверей штаб-квартиры «Яндекса» до места остановки автобуса, который доставляет их в другие столичные офисы техногиганта. Также специалисты «Яндекса» тестировали разные конструкции шасси, которые позволят справляться с рельефом различной сложности и обеспечат безопасность груза.
Дмитрий Полищук говорит, что в последние годы наблюдается постоянный рост спроса на услуги доставки, и события, связанные с пандемией в 2020 г., его еще больше ускорили. «Роверы могут привозить еду из ресторанов, продукты из супермаркетов, заказы из онлайн-магазинов и постепенно будут становиться привычной частью городской жизни», — пояснил он.
Планируется, что «ровер» может стать частью актуальной экосистемы «Яндекса» и частично заменить собой людей-курьеров, в сервисе «Яндекс. еда». Помимо этого, компания может доверить ему доставку товаров из интернет-магазина «Беру» или продуктов из ближайшего к пользователю магазина в рамках сервиса «Яндекс.лавка».
еда». Помимо этого, компания может доверить ему доставку товаров из интернет-магазина «Беру» или продуктов из ближайшего к пользователю магазина в рамках сервиса «Яндекс.лавка».
Искусственный интеллект помог сохранить редкий язык
Инновации для промышленности
Помимо этого, «Яндекс.ровер» может использоваться в складской логистике. Также, как один из вариантов развития проекта «ровер», «Яндекс» видит использование своих роботов другими компаниями.
Другие примеры роботов-«роверов»
В 2017 г. компания Starship Technologies начала в США дорожные испытания самоходных роботов-курьеров для доставки продуктов питания от ресторанов прямо к дверям покупателей. Сначала они понравились далеко не всем покупателям — роботов заливали соусом и переворачивали, однако постепенно стартап смог распространить свою деятельность более чем на сто городов.
В 2019 г. в эксплуатацию был запущен шестиколесный робот Scout для доставки товаров от Amazon. В первоначальных испытаниях приняли участие шесть экземпляров Scout, и тестирование проходило в полевых условиях. Другими словами, Scout доставляли реальные товары реальным покупателям. В августе 2019 г. Amazon провел испытания роботов-курьеров в Калифорнии. Примечательно, что лидара на крыше у Scout нет.
В первоначальных испытаниях приняли участие шесть экземпляров Scout, и тестирование проходило в полевых условиях. Другими словами, Scout доставляли реальные товары реальным покупателям. В августе 2019 г. Amazon провел испытания роботов-курьеров в Калифорнии. Примечательно, что лидара на крыше у Scout нет.
В марте 2019 г. тестирование собственных роботов-курьеров развернула американская логистическая компания FedEx. Ее изобретение получило усовершенствованную подвеску, позволяющую ему буквально взбираться по лестницам, а аккумулятора роботу хватает на преодоление 16 км пути. Грузоподъемность такого дрона — 45 кг.
- Какой дисплей для смартфона лучше: AMOLED или IPS?
Ирина Пешкова
история создания робота-курьера Яндекса / Хабр
Встречайте! Мы выпустили на улицу роботов третьего поколения — модель R3 уже можно встретить в Москве, Иннополисе и США. До конца года мы планируем произвести больше сотни таких роботов, и в дальнейшем будем расширять флот за счёт них.
Меня зовут Алексей, я работаю в Yandex Self-Driving Group: несу ответственность за разработку железа трёх (с половиной) поколений роботов Яндекса. В этой статье я не только коротко расскажу про новое поколение, но и поделюсь историей создания роботов-курьеров. Вы сможете взглянуть их глазами на велосипедиста, узнаете, как собрать прототип из фанеры и трёх гироскутеров, а также почему мы выбрали менее дальнобойные лидары. Всё это я дополню роликами и фотографиями разных этапов разработки. Поехали!
Чем третье поколение отличается от первого
Первого робота мы показали миру 7 ноября 2019 года. С тех пор мы доставляли заказы и в снег, и в дождь, и в бурю, и под солнцем Дубая, и по широким тротуарам Огайо, и по узким, иногда ремонтируемым, улицам Москвы. Итого на данный момент мы разработали, изготовили и обкатали три с половиной поколения роботов: R1, R1.5, R2 и R3. Весь накопленный опыт создания и эксплуатации первых поколений мы использовали в третьем.
Робот стал больше и вместительнее. Теперь мы можем перевозить до 20 кг полезного груза в отсеке объёмом 60 л — это шесть пицц диаметром 40 см и три двухлитровые бутылки Кока-Колы. В роботов второго поколения помещалось только пять пицц, а первое поколение возило только пиццу диаметром 35 см.
R3 едет на вечеринку
Начиная со второго поколения, крышка робота открывается и закрывается автоматически: для этого достаточно нажать кнопку в приложении. Робот третьего поколения научился обнаруживать попытки пользователя закрыть крышку рукой и помогать ему в этом. Грузовой отсек запирается на замок и открывается только из приложения и только для получателя заказа.
Конструкцию робота мы разработали сами, а производство деталей и сборку доверили российским подрядчикам. Стандартные компоненты — чипы, элементную базу, разъёмы, жёсткие диски, процессоры, — конечно, покупаем. Радары и колёса тоже покупные, как и лидары — но именно их мы вскоре поменяем на свои. В первом поколении роботов доля покупных компонентов была больше: мы стремились переиспользовать всё что только можно, чтобы ускорить появление прототипа. Во втором мы разработали и обкатали часть модулей, в третьем случилась еще одна большая итерация разработки электроники.
В первом поколении роботов доля покупных компонентов была больше: мы стремились переиспользовать всё что только можно, чтобы ускорить появление прототипа. Во втором мы разработали и обкатали часть модулей, в третьем случилась еще одна большая итерация разработки электроники.
Роботы первого поколения работали 3,5 часа без подзарядки. Потом мы проапгрейдили первое поколение, установив процессоры ARM (читайте про это ниже), и время работы увеличилось до 7 часов. R2 за счёт оптимизации электроники работали 10 часов. А третье может ездить 8 часов, зато батарейку можно заменить за несколько секунд — робот сразу же поедет доставлять дальше. Чтобы обеспечить горячую замену, мы оборудовали робота резервной несъёмной батареей небольшой ёмкости. Оба аккумулятора по нашему ТЗ собирает российская компания из покупных ячеек. Корпус — наш.
Вот как происходит замена:
У роботов первого поколения была жёсткая подвеска без амортизаторов, с балансирами на передних двух осях. Теперь все оси — на независимых рессорах, а балансиры переехали назад: опыт и эксперименты показали, что так робот едет лучше. «Мягкую» подвеску мы испытали ещё на R2 — и с этим продакшен-опытом за плечами спроектировали подвеску R3. В разделе про разработку я ещё вернусь к тому, как мы тестировали новую подвеску.
Теперь все оси — на независимых рессорах, а балансиры переехали назад: опыт и эксперименты показали, что так робот едет лучше. «Мягкую» подвеску мы испытали ещё на R2 — и с этим продакшен-опытом за плечами спроектировали подвеску R3. В разделе про разработку я ещё вернусь к тому, как мы тестировали новую подвеску.
Роботам третьего поколения мы поставили лидар, у которого 64 луча (в R1 было 16) и большой угол зрения по вертикали. Чтобы лучше задействовать большое поле зрения, мы перенесли лидар в переднюю часть робота. А чтобы раньше замечать машины, когда робот пересекает пешеходные переходы, в рамках апгрейда R1 мы расположили ещё два радара по бокам. Радары позволяют детектировать движущиеся объекты и быстро оценивать скорость их приближения. Ещё мы поставили дополнительные камеры со всех сторон (у первого поколения была только одна камера). А на R3 заменили объективы на фишай для увеличения поля зрения и охвата в 360 градусов.
Начиная со второго поколения мы используем ультразвуковые сенсоры собственной разработки. У первого были обычные парктроники. С наших сенсоров мы можем снять больше данных, полезных для езды в разных условиях, — с покупными сенсорами это было невозможно. В R3 мы увеличили их количество и оптимизировали конструкцию сенсоров.
У первого были обычные парктроники. С наших сенсоров мы можем снять больше данных, полезных для езды в разных условиях, — с покупными сенсорами это было невозможно. В R3 мы увеличили их количество и оптимизировали конструкцию сенсоров.
Теперь ориентироваться в окружающем мире роботам помогает два радара, один лидар, пять камер, акселерометр и GNSS. Функциональную безопасность обеспечивают девять ультразвуковых сенсоров.
Вот как выглядит лидарное облако с нашего робота:
Масса пустого робота — 70 кг, максимальная скорость — 8 км/ч. У робота шесть ведущих мотор-колёс. Передняя ось на независимой рессорной подвеске, а задние две — на рессорно-балансирной (как у КАМАЗа, например). Минимальный дорожный просвет при полной загрузке — 100 мм.
Мы не сразу пришли к такой конструкции робота. Первые два поколения позволили собрать информацию при езде в боевых условиях и уточнить требования к платформе. Каждое следующее поколение проектировалось с учётом опыта, полученного при эксплуатации предыдущих. Ниже я расскажу, как это было.
Ниже я расскажу, как это было.
Три поколения роботов-курьеров, слева направо: R1, R2, R3
R1: как всё начиналось
Мы начали разработку робота-курьера в июне 2019 года. С помощью первого поколения мы хотели как можно скорее проверить, насколько софт, разработанный для большого беспилотного автомобиля, будет применим для управления роботом-курьером на городских тротуарах. Большой беспилотник на тот момент уже умел ездить без водителя по дорогам общего пользования.
Прототип старались делать из покупных компонентов, по возможности не разрабатывая ничего своего. Ведь мы тогда не знали, каким должен быть робот, поэтому тратить ресурсы на разработку «того — не знаю что» in-house было нецелесообразно.
Инженерный центр
Всё, о чём я расскажу ниже, было бы невозможно, если бы у нас не было Инженерного центра. Это волшебное место на юге Москвы, где идеи становятся реальностью. Команда центра — увлечённые своим делом люди с большим опытом из разных индустрий, которые могут полностью разобрать и собрать любую машину, хоть беспилотную, хоть гоночную. У команды есть все необходимые инструменты и оборудование, чтобы быстро производить опытные серии деталей. Это сильно сокращает цикл разработки, когда нужно делать несколько итераций. Все роботы, которые есть у нас сейчас (полторы сотни) — собраны здесь.
Команда центра — увлечённые своим делом люди с большим опытом из разных индустрий, которые могут полностью разобрать и собрать любую машину, хоть беспилотную, хоть гоночную. У команды есть все необходимые инструменты и оборудование, чтобы быстро производить опытные серии деталей. Это сильно сокращает цикл разработки, когда нужно делать несколько итераций. Все роботы, которые есть у нас сейчас (полторы сотни) — собраны здесь.
Инженер-электронщик
Шасси
Мы сформулировали первоначальные требования к шасси нашего робота. Соответствие этих требований действительности предстояло проверить в реальных условиях, поэтому мы стремились как можно быстрее получить работающий прототип.
Затем мы провели мозговой штурм и исследование известных конструкций шасси. В нашей команде были ребята с опытом проектирования и постройки роботов и автомобилей, поэтому вариантов было придумано и рассмотрено очень много. После обсуждений и споров выбрали рабочий вариант: шестиколёсное шасси на мотор-колёсах, все колёса ведущие.
Итак, для первого прототипа мы взяли 8-дюймовые колёса и драйвера от гироскутеров, разработческую плату Nucleo и собрали из фанерки и алюминиевых профилей прототип шестиколёсного шасси, управляемый с пульта. Прошивку для драйверов модифицировали под свои задачи, а команды управления рассылали через Nucleo. Внимательный читатель заметит на картинке ниже VoltaBox из моего прошлого проекта, который пошёл в дело в качестве пятивольтового DC/DC-преобразователя.
Прототип шасси R1
К девборде подключён Wi-Fi адаптер, в который мы слали команды с ноутбука. На ноутбуке был запущен Python-скрипт, преобразующий команды с Bluetooth-джойстика. Мы до сих пор иногда используем этот скрипт для того, чтобы обкатать какие-то новые низкоуровневые хардварные фишки робота.
Платформа была собрана и подготовлена к тестам примерно за два дня одним инженером-конструктором и одним embedded-инженером. А менеджер (я) стоял рядом и держал болгарку.
Большая Красная Кнопка для выключения системы была расположена на самом прототипе, поэтому во время первых тестов я сидел сверху и на всякий случай держал руку где-то рядом с ней. И при первом же тесте на земле это пригодилось: драйвера от гироскутеров оказались слишком умными и при определённом сочетании команд управления платформа начинала неконтролируемо вращаться на месте. Интересно, что на тестах подвешенной платформы, которые мы делали до запуска на полу, мы такого поведения не заметили.
И при первом же тесте на земле это пригодилось: драйвера от гироскутеров оказались слишком умными и при определённом сочетании команд управления платформа начинала неконтролируемо вращаться на месте. Интересно, что на тестах подвешенной платформы, которые мы делали до запуска на полу, мы такого поведения не заметили.
Вот один из первых проездов на платформе:
В целом платформа доказала, что пригодна для использования в прототипе: она была достаточно грузоподъёмной и быстрой. Но тесты показали, что жёстко закреплённые колёса нам не подходят: на неровностях шасси начинало поворачивать непредсказуемо, из-за того что не все колёса касаются земли. Мы добавили балансирную подвеску передних двух осей и дополнительно загрузили среднюю ось с помощью пружин, чтобы робот поворачивал преимущественно вокруг центра средней оси — это необходимо для качественного управления из беспилотного софта. Мы также тестировали на прототипе активное управление качалками с помощью актуаторов. Они не показали себя эффективными, поэтому мы отказались от них в пользу более простой схемы.
Они не показали себя эффективными, поэтому мы отказались от них в пользу более простой схемы.
Шасси с актуаторами. Потом на их место поставили пружины, работающие на растяжение
После тестов конструкторский отдел приступил к разработке робота, которого можно было бы испытывать на улице. Серийность предполагалась до 10 штук. Технологиями производства были выбраны вакуумная формовка пластика, резка и гибка листового металла. Некоторые детали были напечатаны на 3D-принтере, отфрезерованы на ЧПУ и выточены на токарном станке. Вся разработка конструктива происходила внутри команды. Большинство деталей изготовили в России внешние подрядчики.
Сенсоры
Главной задачей MVP было доказать возможность применения нашей беспилотной технологии в принципиально новом формате робота-курьера. Поэтому важно было использовать готовые знакомые нам компоненты, чтобы как можно быстрее проверять гипотезы. Для этого мы выбрали тот лидар, который ставим по бокам нашего беспилотного автомобиля. У нас уже были обученные под него модели и мы надеялись, что они сразу же взлетят на роботе и не потребуется долго собирать новые датасеты. Максимальная дальность действия этого лидара — 100 метров, у него 16 лучей, которые обращаются на 360 градусов вокруг вертикальной оси, сканируя пространство. Из-за особенностей работы оптимально было его поставить в заднюю часть робота.
У нас уже были обученные под него модели и мы надеялись, что они сразу же взлетят на роботе и не потребуется долго собирать новые датасеты. Максимальная дальность действия этого лидара — 100 метров, у него 16 лучей, которые обращаются на 360 градусов вокруг вертикальной оси, сканируя пространство. Из-за особенностей работы оптимально было его поставить в заднюю часть робота.
Кроме детекции объектов, лидар используется для определения положения робота в пространстве — локализации. Алгоритм совмещает полученные с помощью лидара точки с сохранённой в памяти трёхмерной картой и ищет наилучшее совпадение. Для этого лидар должен видеть статические объекты вокруг робота на 360 градусов — здания, столбы, остановки, мусорные корзины. Вертикальный угол обзора нашего лидара был относительно небольшой — 30 градусов — поэтому для надёжности локализации лидар на роботе был установлен строго вертикально.
Чтобы улучшить ближние детекции, мы добавили в переднюю часть робота два парктроника. Сначала мы использовали готовые парктроники. Как и любые стандартные, они пищали, когда видели препятствие, и робот мог напугать пешеходов. Поэтому мы вытащили пищалку из блока управления. Кроме того, нам пришлось хакнуть протокол связи между блоками управления и индикации — иначе в принципе не удавалось пользоваться парктроником: изначально он не предназначался для того, чтобы считывать с него данные в электронном виде.
Сначала мы использовали готовые парктроники. Как и любые стандартные, они пищали, когда видели препятствие, и робот мог напугать пешеходов. Поэтому мы вытащили пищалку из блока управления. Кроме того, нам пришлось хакнуть протокол связи между блоками управления и индикации — иначе в принципе не удавалось пользоваться парктроником: изначально он не предназначался для того, чтобы считывать с него данные в электронном виде.
На первых порах мы просто смотрели на дистанцию на парктрониках и по определённому порогу замедлялись, а потом останавливались. Из-за особенностей работы софта верхнего уровня — там использовалась велосипедная модель движения, — мы не могли разворачиваться на месте. Это нельзя было исправить без вложения значительных ресурсов разработчиков для реализации новой, «танковой», модели движения робота. Поэтому мы сделали на нижнем уровне разворот на месте в случае, когда робот упирался в препятствия парктрониками. Разворачивались в сторону до тех пор, пока не переставали видеть препятствие, затем вступали в действие алгоритмы беспилотника, и мы строили плавную траекторию. В итоге мы успешно и красиво объезжали препятствие. Танковая модель была реализована для серийного робота, а реакция на парктроники перенесена на верхний уровень.
В итоге мы успешно и красиво объезжали препятствие. Танковая модель была реализована для серийного робота, а реакция на парктроники перенесена на верхний уровень.
Кроме этого, в первом роботе была установлена камера, но она использовалась только для записи видео во время тестовых проездов.
Мозги
В беспилотном автомобиле установлена серьёзная серверная x86-платформа с двумя процессорами и тремя видеокартами. Конечно, мы не могли себе позволить возить такое в роботе из-за массы, габаритов и энергопотребления. Нужно было масштабировать эту платформу под ограниченные ресурсы.
Из-за того, что весь софт тогда был написан под x86, мы не стали на этом этапе рассматривать ARM-based embedded решения. Переезд на ARM стоил бы дорого по времени и ресурсам, поэтому, забегая вперёд, скажу, что переезжали мы уже в следующем поколении, когда доказали принципиальную возможность передвижения под управлением беспилотного софта.
Сначала мы хотели взять ноутбук для VR-игр, который игроки носят за спиной. Но оказалось, что таких на тот момент больше не производили. Мы решили собрать свою платформу. Взяли mini-ITX материнку, одну видеокарту, самый мощный на тот момент десктопный процессор и попробовали со всем этим взлететь. Получилось.
Но оказалось, что таких на тот момент больше не производили. Мы решили собрать свою платформу. Взяли mini-ITX материнку, одну видеокарту, самый мощный на тот момент десктопный процессор и попробовали со всем этим взлететь. Получилось.
Кроме вычислителя, и нижнего уровня управления, на борту прописались Ethernet-роутер MikroTik, модуль GeoHub, который был разработан ранее для беспилотника (это Embedded Linux железка, которая отвечает за получение GNSS-сигнала и акселерометр), два модуля связности (LTE+Wi-Fi) — тоже от беспилотника, блоки питания, аккумулятор.
Структурная схема R1
Сравните эту схему со схемой R3 (в конце поста). Тут всего один компонент зелёного цвета — это модуль, разработанный нами ранее для беспилотного автомобиля. Мы старались по максимуму переиспользовать готовые компоненты, чтобы ускорить проверку гипотез.
Первые два робота R1
Масштабирование и адаптация софта
Основной задачей было выключить всё ненужное и не выключать ничего нужного. Чтобы разобраться, что нужно, а что не нужно, я ходил по командам разработчиков и задавал много вопросов занятым большим беспилотником людям, много экспериментировал. Для экспериментов мы собрали прототип без внешней обшивки и приклеили на него монитор с тачскрином для удобства.
Чтобы разобраться, что нужно, а что не нужно, я ходил по командам разработчиков и задавал много вопросов занятым большим беспилотником людям, много экспериментировал. Для экспериментов мы собрали прототип без внешней обшивки и приклеили на него монитор с тачскрином для удобства.
Вот как происходила первая автономная доставка воды спикеру на одном из наших внутренних мероприятий:
Итоги
За четыре месяца нам удалось с нуля спроектировать, собрать и запустить в городе прототип, который можно было показать всему миру, а также масштабировать софт под весьма ограниченные ресурсы и другую платформу. Мы почти не трогали код, в основном меняли конфиги. В этой конфигурации мы собрали ещё несколько роботов, которые выехали в город — около нашего офиса на Льва Толстого и в Сколково, — и совершили первые коммерческие доставки. Кстати, если вам интересно узнать про развитие нашего проекта в коммерческом плане, то 4 декабря об этом будет рассказывать Паша Воробьёв в треке Product на конференции YaTalks.
R1 в Сколково
В наследство от большого беспилотника роботу досталась плавность движений и продуманность траекторий. Конечно, после успешных первых проездов появилась выделенная software-команда, которая стала оптимизировать алгоритмы и код уже специально для робота и проделала за эти два года огромную работу. Но это другая история.
R1.5: переезд на ARM
Первые роботы на x86 жили от батарейки около трёх часов. Даже на тестах приходилось постоянно думать об оставшемся уровне заряда и планировать всё так, чтобы его хватило. Для работы в продакшене необходимо было жить не менее 8 часов (смену). Замеры энергопотребления показали, что большую часть заряда потребляет вычислитель, причём даже когда робот просто стоит на месте. Переход на ARM сулил значительный выигрыш в энергопотреблении, но мы знали, что это будет непросто.
Софт
Внушительная кодовая база, библиотеки, инструменты разработки, инфраструктура — всё было заточено под x86. Поэтому мы знали, что переезд на ARM будет сложной и ресурсоёмкой задачей. Нужно было оптимизировать работу софта под новую архитектуру, соблюдая при этом совместимость с большим беспилотником, ведь у нас одна кодовая база. После того, как код под ARM для робота был готов, он всё ещё жил в отдельной ветке. Её мёрж в dev занял в итоге около месяца.
Поэтому мы знали, что переезд на ARM будет сложной и ресурсоёмкой задачей. Нужно было оптимизировать работу софта под новую архитектуру, соблюдая при этом совместимость с большим беспилотником, ведь у нас одна кодовая база. После того, как код под ARM для робота был готов, он всё ещё жил в отдельной ветке. Её мёрж в dev занял в итоге около месяца.
Инфраструктура тоже сначала не была предназначена для новой платформы. На x86-код собирался прямо на роботе. На ARM мы такого себе позволить уже не могли, поэтому пришлось научиться собирать код в облаке, а потом привозить его на робота в виде бинарей.
А потом и Apple, посмотрев на наш успех, решили переехать на ARM!
Железо
Чтобы ускорить получение робота с большим временем жизни и обкатать новую вычислительную платформу, мы решили разделить разработку нового шасси (R2, о котором ниже) и переезд на ARM. Мы взяли платформу R1 и на её основе разработали робота R1.5 и комплект для апгрейда R1 в R1. 5 с ARM-based вычислителем.
5 с ARM-based вычислителем.
В прототипах мы соединяли компоненты проводами по месту. В R1.5 мы сделали первую итерацию по улучшению проводки робота. В том числе, разработали специальную плату расширения для Nucleo, к которой можно подключать все периферийные устройства с помощью разъёмов, а также вынесли на неё модуль акселерометра, чтобы получить возможность замкнуть обратную связь по акселерометру на нижнем уровне и избавиться от громоздкого для робота GeoHub.
Также для этого поколения мы разработали плату PMU, Power Management Unit. Она позволила мониторить токи и напряжения на каждой ветке, а также программно контролировать питание каждой из них. Иногда это позволяло удалённо перезагружать подвисшие периферийные устройства.
3D-модель Power Management Unit
Мы заменили покупные контроллеры колёс от гироскутеров на свои собственные. На наших контроллерах удалось достичь более высокого КПД колёс. Ещё мы изменили интерфейс UART на более надёжный и привычный для нас CAN и заложили хороший фундамент для будущих разработок, поддержав энкодер и контроль температуры двигателя. Потом мы смогли использовать наш контроллер двигателя для других задач.
Потом мы смогли использовать наш контроллер двигателя для других задач.
Два минорных поколения MotorControl. Найдите 10 отличий
В первых поколениях роботов мы использовали батарейки от электровелосипеда. Чтобы оптимизировать компоновку робота и получить обратную связь (заряд, здоровье, нагрузка) от батарейки, мы заказали батарейку по собственному ТЗ у одного российского производителя. Наши батарейки стали более ёмкими и научились отдавать обратную связь по CAN.
Сенсоры
В первом поколении у нас была одна IP-камера. В R1.5 мы увеличили их число до четырёх, изменили интерфейс на GMSL (как в большом беспилотнике). Камеры расположили по всем сторонам робота. Теперь мы стали видеть всё. Также добавили радары, чтобы издалека обнаруживать приближающиеся автомобили во время пересечения пешеходных переходов.
Итоги
Время работы новой платформы от одного заряда увеличилось более чем вдвое. Мы переоборудовали роботов R1 и собрали ещё пару десятков R1.5, которые были основными рабочими лошадками в российских локациях в Москве и Иннополисе до середины 2021 года, после чего их постепенно заменили на роботов следующего поколения.
Мы переоборудовали роботов R1 и собрали ещё пару десятков R1.5, которые были основными рабочими лошадками в российских локациях в Москве и Иннополисе до середины 2021 года, после чего их постепенно заменили на роботов следующего поколения.
R2: пришельцы на Земле
R2 задумывался как робот с серийностью до 100 штук, с повышенной прочностью корпуса, увеличенным размером грузового отсека и автоматической крышкой. За его увеличенные, по сравнению с первыми моделями, размеры и округлые формы ребята из эксплуатации прозвали роботов этого поколения «пухляшами». Роботы не обиделись. Наверное. В 2139-м узнаем.
Конструкция
Во время проектирования мы уделили много внимания дизайну. Нам хотелось, чтобы на корпусе не было стыков, поэтому он имеет конструкцию типа монокок и выполнен из стеклопластика. Когда мы отдали этих роботов в производство, подрядчики прокляли нас: человеку нужно было влезать внутрь формы и выкладывать стеклопластик изнутри.
Тестирование объёма грузового отсека на прототипе из 3D-принтера
Алюминиевое основание робота R2
В основании робота — алюминиевая сварная рама. На раму крепятся детали подвески, батарейка, кожухи из листового алюминия, электроника и монокок. На монококе размещаются сенсоры. Сенсоры важно размещать на жёсткой конструкции, которую не тревожат во время ремонтов, потому что их калибруют друг к другу: даже после небольших подвижек вся система потребует перекалибровки. Грузовая корзина целиком вынимается из робота: так практически вся электроника оказывается на виду — это очень удобно для ремонта и обслуживания.
MotorControl и PMU под корзиной робота
Колёса
Для первых поколений роботов мы использовали мотор-колёса от гироскутеров. Которые в один не очень прекрасный момент закончились. Их перестали производить, а мы выгребли все остатки в Москве. Мы пытались выйти на фабрику, которая их производит. Натыкались на партии колёс с совершенно разными характеристиками, хотя при продаже характеристики были указаны одинаковые. У нас была табличка с 10 видами колёс, в которой было описано, как их идентифицировать и насколько они хороши. Дополнительной проблемой оказалось, что на робота нельзя было поставить колёса разного типа справа и слева, или слабые колёса на среднюю ось. В результате операция по замене колеса превращалась в раскладывание пасьянсов.
Натыкались на партии колёс с совершенно разными характеристиками, хотя при продаже характеристики были указаны одинаковые. У нас была табличка с 10 видами колёс, в которой было описано, как их идентифицировать и насколько они хороши. Дополнительной проблемой оказалось, что на робота нельзя было поставить колёса разного типа справа и слева, или слабые колёса на среднюю ось. В результате операция по замене колеса превращалась в раскладывание пасьянсов.
Кроме этого, колёса, предназначенные для гироскутеров, имели неудобный для нас способ крепления. Чтобы поменять колесо на первой модели робота, нужно было разобрать часть подвески. Ещё в мокрую погоду колёса начали выходить из строя из-за недостаточной влагоизоляции.
По этим причинам мы приняли решение не использовать мотор-колёса в R2, а унести моторы внутрь робота, передавая крутящий момент с помощью системы шкивов и ремней. Было закуплено около десятка моделей моторов разного типа. Мы спроектировали и изготовили несколько прототипов с таким приводом. Испытания показали, что хоть некоторые моторы и могут обеспечить нам езду по ровной поверхности, мы перестаём преодолевать препятствия, разворачиваться на покрытиях с большим коэффициентом трения, а моторы, расположенные внутри корпуса, перегреваются. В итоге пришлось отказаться от этой схемы: более моментные моторы были тяжёлыми, габаритными и дорогими, а варианты с редуктором имели меньшую надёжность, высокую стоимость и уровень шума.
Испытания показали, что хоть некоторые моторы и могут обеспечить нам езду по ровной поверхности, мы перестаём преодолевать препятствия, разворачиваться на покрытиях с большим коэффициентом трения, а моторы, расположенные внутри корпуса, перегреваются. В итоге пришлось отказаться от этой схемы: более моментные моторы были тяжёлыми, габаритными и дорогими, а варианты с редуктором имели меньшую надёжность, высокую стоимость и уровень шума.
Качалка подвески с ременной трансмиссией
Параллельно мы искали хорошие мотор-колёса, и в итоге вышли на поставщика хороших, стабильных и герметичных, с удобным способом крепления. Мы протестировали новые колёса и сделали выбор в их пользу. А потом оперативно переделали робота под мотор-колёса (мы держали в голове, что такой сценарий возможен и проектировали с его учётом). Этими колёсами пользуемся до сих пор.
Электроника
Специально под R2 мы разработали собственную материнскую плату для вычислителя. На ней разместили Ethernet-роутер, Wi-Fi и LTE-модемы, платы ввода видеопотоков, GNSS-модуль. Таким образом мы избавились от громоздких роутера, GeoHub и коммуникационных модулей, сократили количество межблочных соединений и уменьшили энергопотребление, выиграв ещё три часа работы от батарейки.
На ней разместили Ethernet-роутер, Wi-Fi и LTE-модемы, платы ввода видеопотоков, GNSS-модуль. Таким образом мы избавились от громоздких роутера, GeoHub и коммуникационных модулей, сократили количество межблочных соединений и уменьшили энергопотребление, выиграв ещё три часа работы от батарейки.
Материнская плата вычислителя робота
Сенсоры
Мы перешли на собственные камеры, разработанные ещё для беспилотника. Они обладают всеми необходимыми параметрами: компактные, могут работать в сложных погодных условиях, имеют высокое качество картинки. К тому же сенсор в наших камерах позволяет убрать мигание светодиодов на видео, что важно для правильной детекции сигналов светофора при пересечении дороги. И при этом они обходятся нам дешевле аналогичных камер на рынке.
Камеры SDG
Вместо покупных парктроников мы разработали собственные ультразвуковые сенсоры. Покупные периодически ломались, и будучи для нас чёрным ящиком, не позволяли системно разобраться в проблеме. В итоге у нас получились сенсоры, с которых можно получать не только расстояние до ближайшего предмета (один float), но и целую эхограмму. Теперь у нас появилась возможность посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.
В итоге у нас получились сенсоры, с которых можно получать не только расстояние до ближайшего предмета (один float), но и целую эхограмму. Теперь у нас появилась возможность посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.
Парктроники SDG
Эходамп с парктроника
Мы добавили ещё один парктроник в переднюю часть робота, чтобы получилась вертикальная стереопара, позволяющая получать больше информации о препятствиях. И два парктроника в заднюю часть, чтобы предупреждать столкновения при движении задним ходом.
Итоги
Роботов модели R2 мы собрали около 100 штук. Сейчас они работают во всех локациях, включая США.
R2 выполняет заказ в США
R3: робот, который всё видит
Основной задачей этого поколения было научиться лучше видеть мелкие предметы перед собой. Кроме того, мы хотели научиться заезжать на высокие бордюры, лучше ездить по бездорожью, снегу, лужам, в разных погодных условиях. Мы также спроектировали батарею, которую можно заменить прямо во время работы робота. Это позволяет уменьшить время простоя робота на зарядке.
Мы также спроектировали батарею, которую можно заменить прямо во время работы робота. Это позволяет уменьшить время простоя робота на зарядке.
Что у робота внутри
Структурная схема R3. Зелёным цветом показаны компоненты, которые мы разработали сами
Электронная начинка робота состоит из модулей вычислителя (CarrierBoard), контроллера платформы (PlatformControl), контроллера периферии (BodyControl) и трёх контроллеров колёс (MotorControl).
CarrierBoard — это «мозг» робота. С помощью алгоритмов, которые на нём запущены, робот распознаёт людей, машины и препятствия, планирует траекторию движения и локализуется в пространстве. На плате вычислителя расположен роутер, через который все компоненты связаны в единую бортовую сеть. Видеопотоки с камер тоже попадают напрямую в вычислитель.
PlatformControl отвечает за питание платформы, управляет ограничениями токов на каждой ветке питания, переключает питание на резервную батарею, когда основную вынимают. Также он формирует команды управления колёсами и собирает данные с ультразвуковых сенсоров. MotorControl получают от PlatformControl задание скорости для каждого колеса и управляют токами в обмотках так, чтобы обеспечить заданную скорость в разных условиях движения. BodyControl отвечает за управление мотором крышки, замком и бортовым светом.
Также он формирует команды управления колёсами и собирает данные с ультразвуковых сенсоров. MotorControl получают от PlatformControl задание скорости для каждого колеса и управляют токами в обмотках так, чтобы обеспечить заданную скорость в разных условиях движения. BodyControl отвечает за управление мотором крышки, замком и бортовым светом.
Все электронные компоненты расположены внутри герметичных корпусов.
3D-модель MotorControl в герметичном корпусе
Бóльшая часть корпуса робота выполнена из деталей, изготовленных из стеклопластика. Несущей основой робота являются поддон и корзина. На них навешивается всё остальное: подвеска, кронштейны сенсоров и электронных модулей, внешние панели. Доступ к электронике можно получить после съёма соответствующей панели. Сенсоры при этом остаются на грузовой корзине и не требуют перекалибровки после ремонта.
Из-за того, что мы перенесли лидар вперёд, мы не смогли двигаться итеративно и сделать нового робота на таком же шасси, как у предыдущего поколения. Нельзя просто развернуть корпус робота задом наперёд, это потянуло за собой полную перекомпоновку и переработку конструкции. Зато в процессе мы избавились от монококовой конструкции корпуса и от алюминиевой рамы шасси. Это облегчило изготовление деталей и упростило обслуживание робота.
Нельзя просто развернуть корпус робота задом наперёд, это потянуло за собой полную перекомпоновку и переработку конструкции. Зато в процессе мы избавились от монококовой конструкции корпуса и от алюминиевой рамы шасси. Это облегчило изготовление деталей и упростило обслуживание робота.
Сборка роботов поколения R3 в нашем инженерном центре
Сенсоры
Мы изменили модель лидара. С момента создания предыдущего поколения команда локализации научилась лучше использовать ориентиры, и мы смогли перейти на лидар, который видит не так далеко, зато имеет более широкий угол зрения и 64 луча вместо 16. Поэтому мы смогли разместить его в передней части робота и слегка наклонить вперёд. Таким образом мы значительно увеличили детализацию окружающих объектов в лидарном облаке.
Поиск баланса между высотой отсека и углом обзора лидара
Мы изменили объективы камер, теперь это фишай-линзы с углом зрения больше 180 градусов. В камеру, установленную на роботе, теперь видно кусочек самого робота. Чтобы хорошо видеть светофоры на противоположной стороне широких улиц, мы добавили одну фронтальную камеру с длиннофокусным объективом.
В камеру, установленную на роботе, теперь видно кусочек самого робота. Чтобы хорошо видеть светофоры на противоположной стороне широких улиц, мы добавили одну фронтальную камеру с длиннофокусным объективом.
R3, вид спереди. Камеры закреплены на раме робота: так калибровки не страдают, когда панели корпуса снимают для обслуживания
Подвеска
В R3 мы увеличили дорожный просвет и разработали собственную зимнюю резину с более агрессивным протектором и большей площадью контакта с поверхностью. В процессе отбора идей обсуждались и более радикальные решения вопроса зимней проходимости, но было важно соблюсти баланс: всё-таки большую часть времени робот ездит по очищенным тротуарам. Платформа была готова к тестам летом, в самую жару, поэтому для тестов мы использовали ванну с искусственным снегом (полиакрилат натрия). Тесты показали, что R3 лучше справляется со снежной кашей, чем его предшественник. Зиму в этом году снова обещают снежную, а значит, у нас будет отличная возможность протестировать это и в реальных условиях.
R2 не проезжает тестовую ванну со «снегом»:
R3 проезжает тестовую ванну со «снегом»:
R3 едет по снегу в Иннополисе:
Добавила проходимости рессорная подвеска каждой оси. Раньше подвеска была жёсткой, и мы получали высокий уровень шума на трещинах в асфальте, плитке, брусчатке, а особенно при съездах с бордюров. Чтобы протестировать и обкатать новую подвеску, мы спроектировали её прототип для поколения R2 и оборудовали несколько роботов опытными образцами. Роботов испытывали на шейкере, имитирующем езду по неровной дороге, на тестовом полигоне и на самом бугристом из наших продакшн маршрутов.
Так мы убедились, что карбоновые рессоры выдерживают нагрузку и нашли несколько недочётов, которые удалось исправить до запуска этой подвески на R3.
Вот как робот переезжает тестовое препятствие (скоростная съёмка на айфон):
Крышка
В этой версии робота мы переработали механизм закрытия крышки. Мы сделали его более надёжным, интегрировав петлю прямо в крышку (раньше она крепилась к корпусу кронштейнами). Также мы изменили тип двигателя. Это позволяет нам чувствовать намерение пользователя захлопнуть крышку рукой и реагировать на это штатным закрытием. Крышка также чувствует, если под неё попал посторонний предмет, и открывается обратно, как лифт. Её можно закрыть кнопкой, руками или из приложения:
Мы сделали его более надёжным, интегрировав петлю прямо в крышку (раньше она крепилась к корпусу кронштейнами). Также мы изменили тип двигателя. Это позволяет нам чувствовать намерение пользователя захлопнуть крышку рукой и реагировать на это штатным закрытием. Крышка также чувствует, если под неё попал посторонний предмет, и открывается обратно, как лифт. Её можно закрыть кнопкой, руками или из приложения:
Итоги
Суммарно три поколения роботов уже доставили 60 тысяч заказов. Сборка третьего поколения идёт полным ходом — каждый день появляются новые R3. Например, робот номер 126 штурмует сугробы Иннополиса.
А его товарищ номер 127 в это время любуется на кактусы и пальмы Аризоны. В Москве с R3 можно познакомиться в Хамовниках.
Будут ли новые итерации роботов? Вполне возможно. Мы постоянно анализируем удобство нашего сервиса рободоставки для пользователей и смотрим, что можно улучшить по части железа. Софт постоянно совершенствуется, и каким-то новым фичам может потребоваться хардварная поддержка. С выходом третьего поколения работа не заканчивается, а только начинается.
С выходом третьего поколения работа не заканчивается, а только начинается.
Яндекс.Ровер
Робот-курьер, способный работать в условиях улицы.
На конец 2021 года 1 оператор может «пасти» порядка 10 роботов-курьеров. Ожидается, что постепенно оператор сможет «выпасать» до 100 роботов.
Объем производства — порядка 100 роверов в месяц в 2021 году.
2021.11.03. Дмитрий Полищук, руководитель направления беспилотных технологий Яндекса, сказал: «Роботы Яндекса уже доставили десятки тысяч заказов в США и России.
Внешний вид
Вес: ~50 кг, высота ~0.5 м. Модель 2019 года
Модель 2021 года.
Модель 2021 года. Как видим, раскраска может отличаться.
Новости
2022.08.11 Яндекс планирует перевести в Израиль разработку технологий для развития беспилотного такси и роботов-доставщиков. При этом системный код проекта может переехать из репозитария Яндекса на GitHub. И, в целом, сервисы, обеспечивающие функционирование беспилотных автомобилей до октября 2022 планируется вывести с внутренней инфраструктуры на зарубежные облачные платформы. Подробнее
И, в целом, сервисы, обеспечивающие функционирование беспилотных автомобилей до октября 2022 планируется вывести с внутренней инфраструктуры на зарубежные облачные платформы. Подробнее
2022.03.05 Компания Grubhub закрыла партнерский проект с Яндекс. 100 роботов «Яндекс.Ровер» прекратят доставку в кампусах Университета Огайо и Университета Аризоны. Университеты поищут альтернативного поставщика услуг доставки, благо роботов-курьеров в мире хватает.
Яндекс собирается передислоцировать своих роботов-курьеров в другие страны, где Яндекс продолжит работу.
Роботы производили около 1 тысячи доставок ежедневно. Источник: 3dnews.ru
2021.11.03 Яндекс договорился о развитии беспилотных технологий с компанией Majid Al Futtaim, одним из крупнейших операторов торговых центров, розничной торговли и отдыха на Ближнем Востоке, в Африке и Центральной Азии. В рамках этого соглашения тротуарные роботы-курьеры Яндекс.Ровер появятся на улицах Дубая. В 2022 году будет запущен пилотный проект, который позволит покупателям заказывать доставку российскими роботами из супермаркетов Carrefour. Следить за перемещениями робота, доставляющего заказ, можно будет через приложение MAF Carrefour.
Следить за перемещениями робота, доставляющего заказ, можно будет через приложение MAF Carrefour.
2021.10.08 Компания Yandex Self-Driving Group производит примерно 100 беспилотных роверов ежемесячно.
Каждый оператор на сегодня может отслеживать работу 10 роботов. Ожидается, что постепенно оператор сможет «выпасать» до 100 роботов.
С августа беспилотные роботы «Яндекса» стали доставлять еду в студенческие городки при колледжах и университетах США. Роверы работают в рамках платформы сервиса Grubhub и привозят продукты, еду и заказы из онлайн-магазинов туда, куда нельзя добраться на автомобиле.
2021.07.02 В городе Мурино Всеволожского района Ленинградской области роботы Яндекс.Ровер начали доставлять заказы из Яндекс.Еды в жилые дома. Роботы движутся по тротуарам, их скорость составляет от 5 до 8 км/ч. Проезжую часть роботы пересекают по пешеходным переходам, они распознают сигналы светофора. / lenta.ru
2021.03.27 Яндекс сообщает о планах запуска пилотного сервиса автономной доставки с помощью роботов Яндекс. Ровер грузов в городе Анн-Арбор штата Мичиган в США. Также компания планирует расширить регионы тестирования автономной доставки также на Израиль и Южную Корею. Точной даты начала тестирования в Яндекс не называют. В 2021 году Яндекс планирует заключить коммерческие договоры на поставку систем автономной доставки на базе Яндекс.Ровер другим компаниям.
Ровер грузов в городе Анн-Арбор штата Мичиган в США. Также компания планирует расширить регионы тестирования автономной доставки также на Израиль и Южную Корею. Точной даты начала тестирования в Яндекс не называют. В 2021 году Яндекс планирует заключить коммерческие договоры на поставку систем автономной доставки на базе Яндекс.Ровер другим компаниям.
С апреля 2020 года роботы-курьеры доставили более 4 тысяч заказов. Всего у компании сейчас порядка 35 роботов. На март, судя по доступным данным, пришлось порядка 2 тысяч заказов. / venturebeat.com
2021.03.05 Yandex сообщает, что его роботы Яндекс.Ровер прошли более 7 тыс. км, доставив более 2 тысяч заказов в Москве и в Иннополисе. То есть за февраль выполнено порядка 500 заказов. / ixbt.com
2021.02.13 После фиаско в Татарстане, где роверы буксовали на плохо расчищенной от снега улице, Яндекс начал доставки еды роверами в жилые дома на Ходынском поле в Москве. В декабре и январе роботы уже доставляли продукты и заказы из ресторанов в бизнес-квартал Белая площадь (м.Беларусская) и в Иннополисе (Татарстан). За 2 месяца роботы прошли 7 тысяч км, совершив более 1.5 тыс. доставок (средняя дистанция доставки 4.7 км). На основе полученного опыта конструкция была доработана — увеличен отсек для заказа, а время работы до необходимости перезарадки нарастили до 10 часов. ВИДЕО: rbc.ru
В декабре и январе роботы уже доставляли продукты и заказы из ресторанов в бизнес-квартал Белая площадь (м.Беларусская) и в Иннополисе (Татарстан). За 2 месяца роботы прошли 7 тысяч км, совершив более 1.5 тыс. доставок (средняя дистанция доставки 4.7 км). На основе полученного опыта конструкция была доработана — увеличен отсек для заказа, а время работы до необходимости перезарадки нарастили до 10 часов. ВИДЕО: rbc.ru
2021.01.13 Первый же снежок, выпавший в Татарстане, показал беспомощность роботов-курьеров Яндекс. Чувствующий себя вполне уверенно на чистом асфальте или тротуарной плитке, робот спасовал перед реальными условиями зимней улицы в Иннополисе. Не удивительно, учитывая размер колес устройства и в целом его «паркетную» конструкцию. ВИДЕО: kazanfirst.ru
2020.04 Роботов Яндекс.Ровер начали использовать в Сколково для доставки документов и посылок.
2019.11.07 Яндекс сообщил о тестах уличного робота-курьера Яндекс.Ровер, предназначенного для автономной доставки небольших грузов.
В компании говорят о том, что Ровер умеет распознавать объекты вокруг, планировать маршрут, объезжать препятствия, пропускать пешеходов и животных, а благодаря лидару может делать всё это даже в темноте.
Собрано несколько экземпляров, с ними экспериментируют пока что сотрудники компании. За каждой машиной присматривает оператор. Для автопилота задействованы наработки компании в области беспилотного управления.
Компания пока что не сообщала, когда робот будет готов к продажам или сдаче в аренду другим компаниями, не приводятся и более подробные спецификации устройства. | robotrends.ru
«Яндекс» разработал промышленных роботов для складов и дарксторов
Продолжение сюжета от
Новости СМИ2
Новости
Новости
Анастасия Марьина
Руководитель новостного отдела RB. ru
ru
Анастасия Марьина
«Яндекс» разработал два прототипа складских роботов. Один из них будет заниматься инвентаризацией товаров, которые хранятся в логистическом комплексе «Маркета», другой — перемещать товары в дарксторе «Лавки», раскладывать их по полкам и подносить сборщикам заказов.
Анастасия Марьина
Оба робота должны ускорить складские процессы и освободить сотрудников от монотонных дел, говорится в сообщении «Яндекса».
- Робот-инвентаризатор уже используется в самом большом логистическом комплексе «Маркета» (подмосковное Софьино). Он сканирует QR-коды на упаковках с крупногабаритными товарами и заносит данные в систему складского учета.
Подобные товары хранятся на высоких стеллажах в несколько ярусов. Робот имеет лидар, ультразвуковые сенсоры и камеры.
Робот-инвентаризатор «Яндекса»
- Робот-кладовщик «Лавки» в настоящее время находится на стадии прототипа. Он будет перемещать товары в пределах даркстора. Когда клиент сделает заказ в «Лавке», робот сам возьмет с полок нужное количество товаров и принесет сотруднику склада, чтобы он собрал покупку.
Робота «Лавки» будет компактным, маневренным и устойчивым к низкой температуре. Он способен ездить по кругу и менять траекторию движения без поворота.
Робот-кладовщик «Яндекса»
Обоих роботов полностью спроектировали и собрали команды «Маркета» и «Лавки», прототипы работают на собственном программном обеспечении «Яндекса».
Фото: «Яндекс»
Подписывайтесь на наш Telegram-канал, чтобы быть в курсе последних новостей и событий!
- Роботы
- Технологии
- Яндекс
- Яндекс.
 Лавка
Лавка - Яндекс.Маркет
 Лавка
ЛавкаНашли опечатку? Выделите текст и нажмите Ctrl + Enter
Материалы по теме
- 1 «Яндекс.Лавка» начнет предлагать продукты крафтовых производителей и молодых брендов
- 2 Какие задачи решает автоматизация логистики: кейс «Яндекс.Лавки»
- 3 Ценообразование на маркетплейсах: из чего складывается цена и как рассчитать прибыль при размещении
- 4 Бытовая техника и электроника: что сейчас выгодно продавать на маркетплейсах
- 5 Пониженная комиссия и бесплатное хранение: как маркетплейсы сейчас поддерживают селлеров
ВОЗМОЖНОСТИ
20 сентября 2022
«Конкурс идей» Госкорпорации Ростех
21 сентября 2022
Экспортный акселератор
23 сентября 2022
Worldwide Accelerator
Все ВОЗМОЖНОСТИ
Новости
На российской бирже произошел мощный обвал акций
Колонки
Топ-5 IT-городов России помимо Москвы
Колонки
9 перспективных бизнес-идей после ухода иностранных компаний
Колонки
Как переводить деньги в Европу из России в 2022 году?
Колонки
Как законно уволиться без отработки?
Первый робот-курьер Яндекса теперь живёт в музее
- Главная
- /
- Новости
- /
- Новости рынка
Новости сегодня
| 19:05 | Белла Златкис покинет правление Сбербанка по собственному желанию |
| 18:40 | «Лента» намерена осваивать рынок магазинов малых форматов |
| 18:15 | «Ашан» планирует удвоить онлайн-оборот в 2023 году |
| 17:50 | Wildberries переходит на новую ускоренную приемку товаров на складах |
Маркетинг Как развивается категория спортивного питания, ПП и ЗОЖ-сегмента в новых условиях рынка | |
| 17:25 | Как увеличить продажи с помощью цифровых решений? IT-инфраструктура для омниканальных продаж |
| 17:00 | В ожидании отопления россияне скупают электропростыни |
| 16:35 | «Пятерочка» сократила ассортимент товаров за восемь месяцев на 15% |
| 16:10 | «Вкусно – и точка» презентовала новый дизайн упаковки |
E-commerce FBM, FBS, DBS: как селлеру выбрать модель фулфилмента исходя из ассортимента | |
| 15:45 | Melon Fashion Group намерена в течение 3-5 лет увеличить число магазинов в 1,5 раза |
| 15:20 | «Яндекс Лавка» поможет начинающим производителям рассказать о своем товаре |
| 14:55 | VK получила права на товарный знак «Дзена» |
| 14:30 | В Самаре на месте магазина Bershka открывается универмаг российских дизайнеров SLAVA |
Персоны Елена Попова, «Стильпарк»: «Мы разработали программу поддержки для предпринимателей, чьи зарубежные франчайзеры ушли, оставив партнеров без поддержки» | |
| 14:05 | Х5 поделилась промежуточными итогами пилота фудшеринга в «Пятёрочках» |
| 13:40 | «Стильпарк» презентует франчайзи четыре новые коллекции нижнего белья бренда MiNiMi |
| 13:15 | INFOLine: «ВкусВилл» стал лидером по росту онлайн-продаж среди ТОП-10 ритейлеров по итогам первого полугодия 2022 года |
| 12:50 | Ozon запустил партнерскую доставку из Китая |
Бизнес Plus size — динамика мирового рынка одежды больших размеров | |
| 12:25 | Крупный дистрибьютор выступил против параллельного импорта алкогольных напитков |
| 12:00 | Россияне взяли в августе 48 тыс. кредитов на покупку авто кредитов на покупку авто |
| 11:35 | «Магнит» открыл 500 дискаунтеров «Моя Цена» |
| 11:10 | «ЭФКО» презентовала первое в России растительное масло, произведенное микроорганизмами |
Все новости →
время публикации: 09:45 17 апреля 2022 года
Теги: Яндекс.Ровер
В московском музее Яндекса появился ровер. Это самый первый экземпляр робота-курьера, который был собран в 2019 году.
Посетители музея теперь могут оценить его дизайн и изучить внутреннее устройство, включая материнскую плату и самый главный сенсор — лидар. А смотритель музея расскажет о новом экспонате и ответит на вопросы.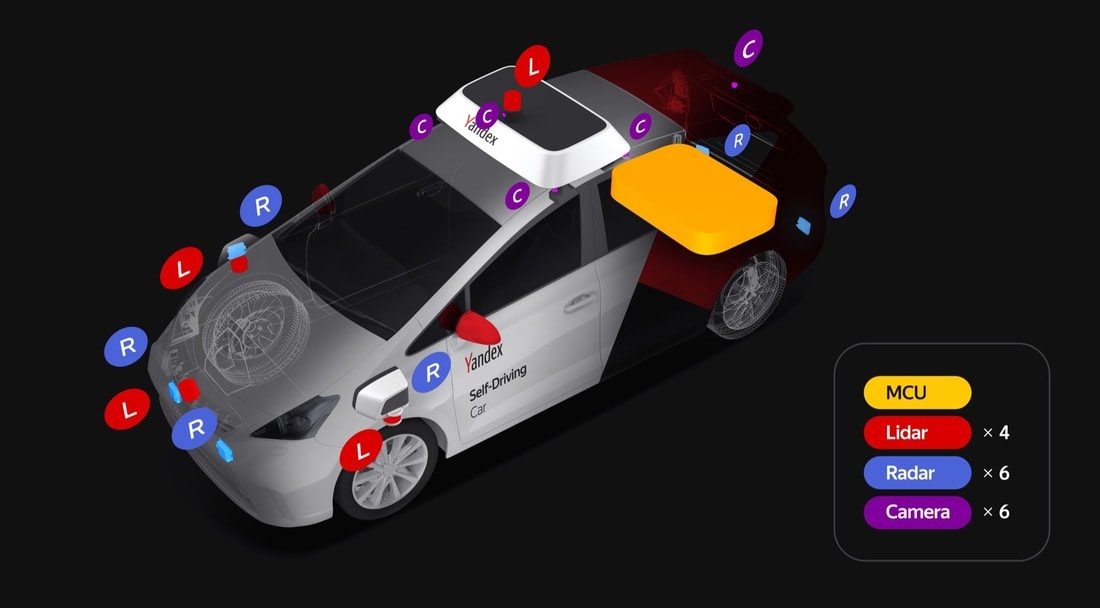
Реклама на New Retail. Медиакит
С этого ровера началось поколение роботов-курьеров R1. Он не такой вместительный, как роверы последнего поколения (R3), меньше работает от батареи. Есть и другие отличия, но сама беспилотная технология у всех роверов одинаковая. Многие решения он перенял у старшего брата — беспилотного автомобиля. Так что на примере первого ровера можно познакомиться с последними достижениями в области IT.
Жителям многих районов Москвы роверы Яндекса хорошо знакомы — они доставляют еду и почту. Теперь можно увидеть необычного курьера в музейной обстановке и поговорить о нём с экспертами.
Читайте также:
FacePay, IoT, VR и другие: технологии, которые меняют ритейл
***
Самые интересные новости читайте в нашей группе в VKontakte, а также на канале Яндекс.Дзен.
Больше новостей и возможность поделиться своим мнением в комментариях на нашем канале в Telegram.
И подписывайтесь на итоговую рассылку самых важных новостей.
New Retail
Теги: Яндекс.Ровер
Реклама на New Retail. Медиакит
Самое популярное
- «Газированный хаос»: кто из игроков сможет победить на «рынке со вкусом колы»
- Тренды на российском рынке франшиз: как и где искать качественную франшизу
- Как и зачем на Западе ритейл становится оператором мобильной связи?
- Как маркетплейс «СберМегаМаркет» настроил процессы и собрал 3,5 миллиона отзывов…
- Как и где рекламироваться в новых условиях?
Реклама на New Retail. Медиакит
История создания робота-доставщика Яндекса | от команды самоуправляемых автомобилей Яндекса | Группа самовывоза Яндекса
Всем привет! Меня зовут Алексей. Я работаю в Yandex Self-Driving Group, где отвечаю за разработку оборудования для трех (с половиной) поколений роботов Яндекса. В этой статье я не только дам вам краткий обзор последнего поколения, но и поделюсь историей создания наших роботов-доставщиков, от самого первого фанерного прототипа до текущей модели. Я также добавил кучу видео и фотографий с разных стадий разработки. Давайте идти!
Я работаю в Yandex Self-Driving Group, где отвечаю за разработку оборудования для трех (с половиной) поколений роботов Яндекса. В этой статье я не только дам вам краткий обзор последнего поколения, но и поделюсь историей создания наших роботов-доставщиков, от самого первого фанерного прототипа до текущей модели. Я также добавил кучу видео и фотографий с разных стадий разработки. Давайте идти!
Мы представили миру нашего первого робота 7 ноября 2019 года. С тех пор мы доставляем заказы и в снег, и в дождь, и во время бури, и в солнечном Дубае, и по широким тротуарам Огайо, и по узким — иногда отремонтировано — улица Московская. На данный момент мы разработали, изготовили и протестировали три с половиной поколения роботов: R1, R1.5, R2 и R3. Весь опыт, полученный нами при создании и эксплуатации первых поколений, пошел на разработку третьего поколения. Теперь я объясню, чем роботы R3 отличаются от своих предшественников.
Этот робот больше и просторнее. Теперь мы можем перевозить в 60-литровом отсеке полезную нагрузку до 20 кг — например, шесть пицц диаметром 40 см и три 2-литровые бутылки кока-колы. Внутри робота второго поколения могло поместиться только пять пицц, в то время как первое поколение могло перевозить пиццы не более 35 см в диаметре.
Внутри робота второго поколения могло поместиться только пять пицц, в то время как первое поколение могло перевозить пиццы не более 35 см в диаметре.
Начиная со второго поколения, крышку робота можно было открывать и закрывать автоматически, просто нажав кнопку в приложении. Робот третьего поколения научился определять, когда кто-то пытается закрыть крышку вручную, и помогать им в этом. Грузовой отсек заперт и может быть открыт только через приложение и только получателем заказа.
Мы сами спроектировали робота, а производство деталей и сборку доверили подрядчикам. И, конечно же, мы закупили стандартные компоненты, такие как чипы, разъемы, жесткие диски и процессоры. Радары и колеса тоже готовы, как и лидары — правда, скоро мы заменим их собственными, собственного производства. Для первого поколения роботов больший процент компонентов был готов, чтобы ускорить создание прототипа. Во втором поколении мы разработали и протестировали некоторые модули; в третьем мы разработали намного больше электроники.
Роботы первого поколения могли работать 3,5 часа без подзарядки. Затем мы модернизировали первое поколение, установив процессоры ARM (см. ниже), увеличив время работы до 7 часов. После того, как мы оптимизировали электронику, R2 мог работать 10 часов. В то время как третье поколение может работать в течение 8 часов, аккумулятор можно быстро заменить всего за несколько секунд, что означает, что робот может сразу же продолжить доставку. Для горячей замены мы оснастили робота небольшой несъемной резервной батареей. Обе батареи собираются подрядчиком с использованием готовых элементов в соответствии с нашими техническими спецификациями. Каркас — наша собственная конструкция.
Замена аккумулятора Первое поколение роботов имело жесткую подвеску без амортизаторов и тележек на двух передних осях. Теперь все оси на независимых листовых рессорах, а тележки перенесены назад: опыт и эксперименты показали, что так робот лучше передвигается. Мы протестировали «мягкую» подвеску на R2 — и, имея за плечами этот производственный опыт, разработали подвеску для R3. В разделе разработки я вернусь к тому, как мы тестировали новую подвеску.
В разделе разработки я вернусь к тому, как мы тестировали новую подвеску.
Для роботов третьего поколения мы установили лидар с 64 лучами (у R1 было 16) и большим вертикальным углом обзора. Чтобы лучше использовать большое поле зрения, мы переместили лидар на переднюю часть робота.
Чтобы раньше обнаруживать автомобили, когда робот переходит пешеходные переходы, мы разместили — в рамках обновления R1 — два радара по бокам. Радары позволяют роботу обнаруживать движущиеся объекты и быстро оценивать скорость их приближения.
Мы также установили дополнительные камеры с каждой стороны (в первом поколении была только одна камера) и заменили объективы на R3 объективами типа «рыбий глаз», чтобы увеличить поле зрения и обеспечить охват на 360 градусов.
Начиная со второго поколения, мы используем собственные ультразвуковые датчики. В первом поколении использовались обычные датчики парковки. С нашими датчиками мы можем собирать больше данных, полезных для вождения в различных условиях — мы не могли сделать это с готовыми датчиками. В R3 мы увеличили количество датчиков и оптимизировали их конструкцию.
В R3 мы увеличили количество датчиков и оптимизировали их конструкцию.
Теперь два радара, один лидар, пять камер, акселерометр и GNSS помогают нашим роботам ориентироваться в окружающем мире. Девять ультразвуковых датчиков обеспечивают функциональную безопасность.
Облако точек нашего роботаРобот весит 70 кг без груза и может развивать максимальную скорость 8 км/ч (5 миль в час). Он имеет шесть моторизованных ведущих колес. Передний мост имеет независимую рессорную подвеску, а два задних моста — на рессорной подвеске тележек. Минимальный дорожный просвет с полной полезной нагрузкой составляет 100 мм.
Этот дизайн мы придумали не сразу. Первые два поколения позволили нам собирать информацию во время работы в полевых условиях и уточнять требования к платформе. При проектировании каждого последующего поколения учитывался опыт, полученный при эксплуатации предыдущих. О том, как это происходило, я расскажу ниже.
Три поколения автономных роботов-доставщиков Яндекса Мы начали разработку нашего робота-доставщика в июне 2019 года. С помощью первого поколения мы хотели как можно быстрее проверить, как программное обеспечение, разработанное нами для беспилотных автомобилей, можно использовать для управления роботом-курьером на городских тротуарах. Наши беспилотники в то время уже умели работать без водителя на дорогах общего пользования.
С помощью первого поколения мы хотели как можно быстрее проверить, как программное обеспечение, разработанное нами для беспилотных автомобилей, можно использовать для управления роботом-курьером на городских тротуарах. Наши беспилотники в то время уже умели работать без водителя на дорогах общего пользования.
Мы постарались сделать прототип из готовых компонентов — по возможности не разрабатывая ничего собственного. В конце концов, в то время мы не знали, как должен выглядеть робот, поэтому решили, что не стоит тратить внутренние ресурсы на разработку чего-то без четкого видения.
Инженерный центр
Все, что я опишу ниже, было бы невозможно без нашего Инженерного центра. Это волшебное место, где идеи становятся реальностью. Сотрудники Центра увлечены своим делом; это люди с большим опытом работы в различных отраслях, которые могут полностью разобрать и собрать любой автомобиль, будь то беспилотник или гоночный болид. В штате есть все необходимое оборудование для быстрого изготовления партий опытных деталей. Это значительно сокращает цикл разработки, когда нужно проводить несколько итераций. Все наши роботы (на данный момент их двести) собраны здесь.
Это значительно сокращает цикл разработки, когда нужно проводить несколько итераций. Все наши роботы (на данный момент их двести) собраны здесь.
Шасси
Мы сформулировали первоначальные требования к шасси нашего робота. Соответствие этих требований действительности нужно было проверять в реальных условиях, поэтому мы постарались как можно быстрее изготовить рабочий прототип.
Затем мы провели мозговой штурм и исследовали существующие конструкции шасси. В нашей команде были ребята с опытом проектирования и сборки роботов и автомобилей, поэтому они придумали огромное количество вариантов для рассмотрения. После долгих дискуссий и споров мы выбрали рабочий вариант: шестиколесное шасси на мотор-колесах — все колеса ведущие.
Итак, для первого прототипа мы взяли 8-дюймовые колеса и драйверы от гироскутеров, макетную плату Nucleo и собрали прототип дистанционно управляемого шестиколесного шасси из фанеры и алюминия. Мы модифицировали прошивку для драйверов, а команды управления отправлялись через Nucleo.
К плате разработки был подключен адаптер Wi-Fi, который получал команды от ноутбука. Мы запустили на ноутбуке скрипт Python, который преобразовывал команды с джойстика Bluetooth. Мы до сих пор иногда используем этот скрипт для тестирования некоторых новых низкоуровневых аппаратных функций робота.
Платформа была собрана и подготовлена к тестированию примерно за два дня одним инженером-конструктором и одним инженером по внедрению. А менеджер (я) стоял рядом с болгаркой в руках.
Большая красная кнопка для выключения системы была размещена на самом прототипе, поэтому во время первых тестов я сидел сверху, держа руку рядом с кнопкой — на всякий случай. И это пригодилось во время первого же испытания на земле: водители гироскутеров оказались слишком сообразительны, и при вводе определенной комбинации управляющих команд платформа начинала неконтролируемо вращаться на месте. Интересно, что мы не заметили такого поведения, когда запускали тесты на платформе в подвешенном состоянии, что мы и сделали перед началом тестирования на земле.
В целом платформа оказалась пригодной для использования в прототипе: она была достаточно быстрой и способной нести груз. Но тесты показали, что фиксированные колеса не были хорошим решением: на неровной поверхности шасси начинало непредсказуемо поворачивать из-за того, что не все колеса касались земли. Мы добавили тележку на две передние оси, а также добавили рессоры на среднюю ось, чтобы робот вращался в основном вокруг центра средней оси — это было необходимо для обеспечения надежного программного управления беспилотными транспортными средствами. Мы также протестировали активное управление с помощью исполнительных механизмов. Они не очень хорошо работали, поэтому мы отказались от них в пользу более простой настройки.
Шасси оборудовано исполнительными механизмами. Затем приводы были заменены пружинами растяжения. После этих испытаний конструкторский отдел приступил к разработке робота, который можно было бы испытывать на открытом воздухе. Мы планировали изготовить их целых 10 штук. В качестве технологий производства были выбраны вакуумное формование пластмасс, а также резка и формовка листового металла. Некоторые детали были напечатаны на 3D-принтере, фрезерованы на станке с ЧПУ и обработаны на токарном станке. Наша собственная команда разработала все элементы конструкции. Большинство деталей было изготовлено внешними подрядчиками.
Мы планировали изготовить их целых 10 штук. В качестве технологий производства были выбраны вакуумное формование пластмасс, а также резка и формовка листового металла. Некоторые детали были напечатаны на 3D-принтере, фрезерованы на станке с ЧПУ и обработаны на токарном станке. Наша собственная команда разработала все элементы конструкции. Большинство деталей было изготовлено внешними подрядчиками.
Датчики
Основная цель MVP состояла в том, чтобы доказать, что можно использовать нашу технологию автономного вождения в наших роботах-доставщиках. Поэтому было важно использовать уже знакомые нам готовые компоненты, чтобы как можно быстрее проверять гипотезы. Для этой цели мы выбрали лидар, который прикрепляем к бортам наших беспилотных автомобилей. У нас уже были модели машинного обучения, которые научились его использовать, и мы надеялись, что они сразу заработают на роботе и нам не нужно будет тратить много времени на сбор новых наборов данных. Этот лидар имеет максимальную дальность 100 метров; он имеет 16 лучей, которые вращаются на 360 градусов вокруг вертикальной оси для сканирования пространства вокруг робота. Из-за характера работы лучше всего было разместить его сзади робота.
Из-за характера работы лучше всего было разместить его сзади робота.
Помимо обнаружения объектов, лидар используется для определения положения робота в пространстве — локализации. Алгоритм сопоставляет точки, полученные с помощью лидара, с хранящейся в его памяти трехмерной картой и ищет наилучшее совпадение. Для этого лидар должен иметь возможность видеть статические объекты — здания, столбы, автобусные остановки, мусорные баки — на 360 градусов вокруг робота. Вертикальный угол обзора нашего лидара был относительно небольшим — 30 градусов; поэтому для обеспечения надежной локализации лидар был установлен строго вертикально.
Чтобы улучшить обнаружение вблизи, мы добавили два датчика парковки в передней части робота. Сначала мы использовали стандартные датчики парковки. Как и любые стандартные, они издавали звуковой сигнал при виде препятствия, а также робот мог пугать пешеходов. В связи с этим было принято решение убрать бипер с блока управления. Кроме того, нам пришлось взломать протокол связи между блоками управления и индикации — иначе было бы невозможно использовать парктроник: он не предназначен для считывания данных в электронном виде.
Сначала мы просто смотрели на расстояние по парктронику и на определенном пороге притормаживали, а потом и остановились. Из-за специфики программного обеспечения верхнего уровня, предназначенного для воспроизведения модели велосипеда, мы не смогли развернуться на месте. Невозможно было исправить это, не вкладывая значительные ресурсы разработчиков для внедрения новой модели, основанной на модели мини-погрузчика. Поэтому на нижнем уровне мы сделали так, чтобы робот поворачивался на месте всякий раз, когда его датчики парковки встречали препятствие. Он поворачивался в сторону до тех пор, пока не переставал видеть препятствие; тогда в дело вступят алгоритмы самостоятельного вождения и проложат четкий маршрут. В конце концов, робот с легкостью обходил препятствие. Модель с бортовым поворотом была включена в следующие версии наших роботов, при этом поддержка поворота с бортовым поворотом, а также реакция на датчики парковки были перемещены на верхний уровень.
Кроме того, в первом роботе была установлена камера, но она использовалась только для записи видео во время тест-драйвов.
Мозги
В наших беспилотных автомобилях установлена серьезная серверная платформа x86 с двумя процессорами и тремя видеокартами. Конечно, мы не могли поставить это в наших роботов из-за веса, размера и энергопотребления. Нам пришлось масштабировать платформу для работы с ограниченными ресурсами.
Поскольку в то время все программное обеспечение было написано для x86, мы не рассматривали встраиваемые решения на базе ARM на этом этапе. Переход на ARM стоил бы нам много времени и ресурсов; так что — рискуя забежать вперед — скажу, что мы совершили переход при производстве следующего поколения, когда доказали, что движение роботов, управляемое программным обеспечением для наших беспилотных автомобилей, в принципе возможно.
Сначала мы хотели использовать для VR-игр ноутбук, который игроки носят на спине. Но оказалось, что их в то время уже не производили. Поэтому мы решили создать собственную платформу. Мы взяли материнскую плату mini-ITX, одну видеокарту и самый мощный на тот момент десктопный процессор и попытались со всем этим оторваться от земли. Это сработало.
Это сработало.
Помимо компьютера и нижнего уровня управления, на борту также находился маршрутизатор MikroTik Ethernet, модуль GeoHub, ранее разработанный для беспилотного автомобиля (это аппаратная часть Embedded Linux, отвечающая за прием сигнала ГНСС и для акселерометра) и два модуля связи (LTE + Wi-Fi) также от беспилотного автомобиля, блок питания и аккумулятор.
Схема R1Сравните эту схему со схемой R3 (в конце поста). Здесь только один зеленый компонент — это модуль, который мы разработали ранее для беспилотного автомобиля. Мы постарались максимально повторно использовать готовые компоненты, чтобы ускорить проверку гипотез.
Первые два робота R1Масштабирование и адаптация ПО
Главной задачей было отключить все, что нам не нужно, и не выключать ничего, что нам нужно. Чтобы понять, что нам нужно, а что нет, я обошел все команды разработчиков и задал людям, которые работали над нашими беспилотными автомобилями, множество вопросов; Я много экспериментировал. Для наших экспериментов мы собрали прототип без внешнего корпуса и для удобства прикрепили к нему монитор с тачскрином.
Для наших экспериментов мы собрали прототип без внешнего корпуса и для удобства прикрепили к нему монитор с тачскрином.
Результаты
За четыре месяца нам удалось с нуля спроектировать и собрать прототип, который мы запустили в городе, а также масштабировать программное обеспечение работать с очень ограниченными ресурсами и на других платформах. Мы почти не касались кода; мы в основном изменили конфигурации. В этой конфигурации мы собрали еще несколько роботов, которые отправили в город — возле нашего офиса в Москве и в Сколково — и осуществили первые коммерческие поставки.
R1 в Сколково Мягкость хода и планирование маршрута робот унаследовал от наших беспилотных автомобилей. Конечно, после первых успешных поездок была создана специальная команда разработчиков программного обеспечения, которая начала оптимизировать алгоритмы и код специально для робота, и за эти два года они проделали большую работу. Но это другая история.
Но это другая история.
Первые роботы x86 работали от батареи около 3 часов. Даже во время тестирования нам приходилось постоянно думать об остатке заряда и планировать все так, чтобы нам хватило мощности. Чтобы работать на производстве, он должен был выдерживать не менее 8 часов (смены). Замеры энергопотребления показали, что компьютер потреблял большую часть заряда, даже когда робот просто стоял на месте. Переход на ARM обещал значительную экономию энергии, но мы знали, что это будет проблемой.
Программное обеспечение
Впечатляющая кодовая база, библиотеки, средства разработки, инфраструктура — все было основано на x86. Поэтому мы знали, что переход на ARM будет сложным и ресурсоемким мероприятием. Нам пришлось оптимизировать программное обеспечение для новой архитектуры, сохранив при этом совместимость с нашими большими беспилотными транспортными средствами — в конце концов, автомобили и роботы имели одинаковую кодовую базу. Когда код был готов для управления роботом с использованием архитектуры ARM, он все еще находился в отдельной ветке. В итоге на то, чтобы слить его в разработку, ушло около месяца.
В итоге на то, чтобы слить его в разработку, ушло около месяца.
Инфраструктура тоже изначально не рассчитана на новую платформу. В x86 код создавался непосредственно на роботе. С ARM мы больше не могли этого делать, поэтому нам пришлось научиться собирать код в облаке, а затем передавать его в бинарном виде роботу.
Аппаратное обеспечение
Чтобы ускорить производство робота с длительным временем работы и протестировать новую вычислительную платформу, мы решили разделить разработку нового шасси (R2, которое описано ниже) и переход на РУКА. Мы использовали проект R1 в качестве основы для разработки наших роботов R1.5 на базе ARM. Чтобы максимизировать эффективность, мы также модернизировали наши оригинальные роботы R1 до R1.5, используя специализированные комплекты модернизации, разработанные внутри компании.
В прототипах мы установили провода для соединения компонентов. В R1.5 мы сделали первую итерацию по улучшению проводки робота. Помимо прочего, мы разработали специальную плату расширения для Nucleo, к которой можно подключать периферийные устройства с помощью разъемов, а также поставили на нее модуль акселерометра, чтобы можно было замкнуть контур обратной связи акселерометра на нижнем уровне и получить избавиться от GeoHub, который был слишком громоздким для робота.
Для этого поколения мы также разработали блок управления питанием. Это позволило нам контролировать токи и напряжения на каждой ветке, а также контролировать электропитание каждой из них с помощью программного обеспечения. Иногда это позволяло нам удаленно перезагружать периферийные устройства.
Блок управления питанием 3D модельМы заменили штатные контроллеры колес от гироскутеров на собственные фирменные. Нам удалось добиться лучшей производительности руля с помощью собственных контроллеров. Мы также изменили интерфейс UART на более надежный интерфейс CAN, с которым мы знакомы, и заложили хорошую основу для будущих разработок, поддерживая энкодер и контроль температуры двигателя. Затем мы смогли использовать наш контроллер двигателя для других задач.
Две незначительные модификации MotorControl В первых поколениях роботов мы использовали батареи для электровелосипедов. Для оптимизации конструктивной конфигурации робота и получения обратной связи (зарядка, работоспособность, нагрузка) от аккумулятора мы заказали у производителя аккумулятор на основе собственного технического задания. Наши аккумуляторы имели большую емкость и научились обеспечивать обратную связь через интерфейс CAN.
Наши аккумуляторы имели большую емкость и научились обеспечивать обратную связь через интерфейс CAN.
Датчики
В первом поколении у нас была одна IP-камера. В R1.5 мы добавили еще три и изменили интерфейс на GMSL (как в наших беспилотных автомобилях). Мы разместили камеры с каждой стороны робота. Теперь мы начали видеть все. Мы также добавили радары для обнаружения встречных транспортных средств на расстоянии при пересечении пешеходных переходов.
Результаты
Время работы новой платформы от одного заряда увеличилось более чем вдвое. Мы переоборудовали роботов R1 и собрали еще пару десятков роботов R1,5, которые были основными рабочими лошадками в Москве и Иннополисе до середины 2021 года, после чего их постепенно заменили нашими роботами следующего поколения.
R2 задумывался как робот — мы рассчитывали сделать до 100 штук для коммерческих целей — с повышенной прочностью кузова, увеличенным грузовым отсеком и автоматизированной крышкой.
Конструкция
Мы уделили большое внимание дизайну. Мы не хотели, чтобы кузов имел какие-либо стыки, поэтому он имел монококовую конструкцию и был сделан из стеклопластика. Когда мы запустили этих роботов в производство, подрядчики проклинали нас: кто-то должен был залезть внутрь пресс-формы и установить стеклопластик изнутри.
Распечатанный на 3D-принтере прототип для испытаний на вместимость Основой робота была сварная алюминиевая рама. К раме крепились детали подвески, аккумулятор, корпус из алюминиевого листа, электроника и несущий кузов. Датчики разместили на монококе. Было важно разместить датчики на жесткой конструкции, которую нельзя было бы нарушить во время технического обслуживания, потому что они были откалиброваны друг к другу: если их сдвинуть хоть немного, всю систему пришлось бы перекалибровать. С робота можно было снять весь грузовой отсек: это позволяло видеть все электронные компоненты — что было удобно для ремонта и обслуживания.
Колеса
Для первых поколений роботов мы использовали моторизованные колеса от гироскутеров. Которых в один неудачный для нас момент уже не было в наличии. Их перестали делать, а все остальное мы скупили в магазинах. Мы пытались пойти на завод, который их производил. Нам попалась партия колес с совершенно разными характеристиками, хотя при покупке нам сказали, что они идентичны. У нас была таблица со списком 10 видов колес с описанием того, как их идентифицировать и насколько они хороши. Дополнительная проблема, которая возникла, заключалась в том, что мы не могли поставить разные типы колес справа и слева, а также не могли поставить колеса более низкого качества на среднюю ось. В итоге замена колес превратилась в игру на терпение.
Кроме того, колеса, предназначенные для гироскутеров, было непросто прикрепить. Чтобы поменять колесо на первой модели, пришлось разобрать часть подвески. А в сырую погоду колеса начали глючить из-за недостаточной защиты от атмосферных воздействий.
По этим причинам мы решили не использовать моторизованные колеса в R2, а поместить моторы внутри робота, передающие крутящий момент с помощью системы шкивов и ремней. Мы приобрели около десятка различных типов моторов. Мы спроектировали и изготовили несколько прототипов с таким приводным механизмом. Испытания показали, что хотя некоторых моторов было достаточно для движения по ровной поверхности, мы уже не могли преодолевать препятствия, разворачиваться на поверхностях с высоким коэффициентом трения, а моторы, расположенные внутри кузова, перегревались. В итоге от этой установки пришлось отказаться: моторы с большим крутящим моментом были тяжелыми, негабаритными и дорогими, а варианты с редуктором менее надежными, дорогими и шумными.
Тележка с приводным ремнем Параллельно мы искали хорошие мотор-колеса, и в итоге нашли поставщика качественных, устойчивых и герметичных колес — и легко монтируемых. Мы протестировали новые колеса и решили их использовать. А затем мы быстро переделали робота для использования с моторизованными колесами (мы имели в виду, что такой сценарий возможен, и учитывали его в наших проектах). С тех пор мы пользуемся этими колесами.
С тех пор мы пользуемся этими колесами.
Электроника
Мы разработали собственную материнскую плату для компьютера R2. Он содержит маршрутизатор Ethernet, модемы Wi-Fi и LTE, карты ввода видеопотока и модуль GNSS. Итак, мы избавились от громоздкого роутера, GeoHub и модулей связи, уменьшили количество взаимосвязей и снизили энергопотребление, выиграв еще 3 часа автономной работы.
Материнская плата вычислительного блокаДатчики
Мы перешли на собственные камеры, разработанные для наших беспилотных автомобилей. У них есть все необходимые параметры: они компактны, могут работать в сложных погодных условиях, обеспечивают высокое качество изображения. Кроме того, датчик в наших камерах позволяет убрать на видео мигающие светодиоды, что важно для правильного определения сигналов светофора при переходе дороги. И все же они обходятся нам дешевле, чем аналогичные камеры на рынке.
Фирменные камеры Яндекс SDG Вместо штатных датчиков парковки мы разработали собственные ультразвуковые датчики собственной разработки. Стандартные датчики периодически ломались, и, будучи для нас черным ящиком, мы не могли понять проблему на системном уровне. В конце концов, наши датчики дают не только расстояние до ближайшего объекта (одно число с плавающей запятой), но и всю ультрасонограмму. Теперь мы можем посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.
Стандартные датчики периодически ломались, и, будучи для нас черным ящиком, мы не могли понять проблему на системном уровне. В конце концов, наши датчики дают не только расстояние до ближайшего объекта (одно число с плавающей запятой), но и всю ультрасонограмму. Теперь мы можем посмотреть на данные и настроить пороги срабатывания для разных погодных условий и дорожных покрытий.
Мы добавили еще один датчик парковки спереди робота, чтобы создать вертикальную стереопару, позволяющую получать больше информации о препятствиях. И два датчика парковки сзади для предотвращения столкновений при движении задним ходом.
Фирменные датчики парковки Яндекс SDGУльтрасонограмма датчика парковкиРезультаты
Мы собрали около 100 роботов модели R2. Сейчас они работают во всех странах, включая США.
R2 доставляет заказ в Анн-Арбор, штат Мичиган 9.0002 Главное, чего мы хотели добиться в этом поколении, — научить роботов лучше видеть мелкие объекты перед собой. Кроме того, мы хотели, чтобы они научились заезжать через высокие бордюры и лучше ездить по бездорожью, по снегу, по лужам и в разных погодных условиях. Мы также разработали батарею, которую можно заменить во время работы робота. Это позволило сократить время простоя во время зарядки робота.Под капотом
Принципиальная схема R3. Компоненты, разработанные Yandex SDG, окрашены в зеленый цвет.Электроника под капотом робота включает в себя несущую плату, управление платформой, управление телом и управление двигателем.
Несущая плата — это «мозги» робота. Используя запущенные на нем алгоритмы, робот может распознавать людей, автомобили и препятствия; планировать маршруты; и определите, где он находится. Несущая плата содержит маршрутизатор, который соединяет все компоненты в единую бортовую сеть. Видеопотоки с камер также идут напрямую на компьютер.
Блок управления платформой отвечает за питание платформы, управляет ограничениями тока на каждой ветви питания и переключается на резервную батарею при удалении основной батареи. Он также генерирует сигналы рулевого управления для колес и собирает данные с ультразвуковых датчиков. Система управления двигателем получает задание скорости для каждого колеса от системы управления платформой и регулирует токи в обмотках, чтобы обеспечить желаемую скорость в различных условиях движения. Блок управления кузовом отвечает за управление мотором крышки, замком и светодиодами.
Все электронные компоненты расположены внутри герметичных корпусов.
Герметичная модель MotorControl 3DБольшая часть корпуса робота изготовлена из деталей из стеклопластика. Несущий фундамент робота состоит из поддона и корзины. Все остальное размещено сверху: подвеска, кронштейны для датчиков и электронных модулей, а также внешние панели. Доступ к электронике можно получить, сняв соответствующую панель. При этом датчики остаются на грузовой корзине и не требуют повторной калибровки после обслуживания.
Поскольку мы переместили лидар вперед, мы не смогли итеративно создать нового робота на том же шасси, что и предыдущее поколение. Вы не можете просто повернуть корпус робота; это повлекло за собой полную реконфигурацию и перепроектирование конструкции. Однако в ходе этого процесса мы избавились от несущего кузова и шасси с алюминиевой рамой. Это упростило изготовление деталей и упростило техническое обслуживание.
Датчики
Мы изменили модель лидара. С момента создания предыдущего поколения команда локализаторов научилась лучше использовать ориентиры, и мы смогли перейти на лидар, который видит не так далеко, но имеет более широкий угол обзора и 64 луча вместо 16. Вот почему мы смогли разместить его впереди робота и немного наклонить вперед. Таким образом, мы значительно повысили уровень детализации окружающих объектов в облаке точек.
Балансировка размера хранилища и угла обзора LiDAR Мы заменили объективы камеры: теперь это объективы типа «рыбий глаз» с углом обзора более 180 градусов. Когда камера установлена на роботе, она может видеть небольшую часть самого робота. Чтобы получить хороший обзор светофоров на противоположной стороне широких улиц, мы добавили одну фронтальную камеру с телеобъективом.
Подвеска
В R3 мы увеличили дорожный просвет и разработали собственные зимние шины с более агрессивным протектором и улучшенным контактом с поверхностью. В процессе редукции идей обсуждались более радикальные решения вопроса зимней маневренности, но важно было соблюсти баланс: ведь роботы большую часть времени ездят по расчищенным тротуарам. Платформа была готова к испытаниям в самые жаркие летние месяцы, поэтому для испытаний мы использовали трассу с искусственным снегом (полиакрилат натрия). Испытания показали, что R3 справляется со слякотью лучше, чем его предшественник. В этом году нас снова ждет снежная зима, а это значит, что у нас будет отличная возможность провести тесты в реальных условиях.
Рессорная подвеска на каждой оси повысила маневренность. Раньше подвеска была жесткой, что приводило к сильному шуму при езде по трещинам в асфальте, плитке, булыжнике и особенно при съезде с бордюров. Для проведения испытаний новой подвески мы разработали прототип для поколения R2 и оснастили им несколько роботов. Роботы были протестированы на вибростенде, имитирующем ухабистую дорогу, на испытательном треке и на самых ухабистых из наших производственных маршрутов.
Таким образом, мы убедились, что карбоновые листовые рессоры выдерживают нагрузку, и обнаружили несколько дефектов, которые нам удалось исправить, прежде чем ставить эту подвеску на R3.
Робот преодолевает тестовое препятствиеКрышка
В этой версии робота переработан механизм закрытия крышки. Мы сделали его более надежным, встроив шарнир прямо в крышку (ранее он крепился к корпусу скобами). Мы также изменили тип двигателя. Это позволяет нам почувствовать попытку пользователя захлопнуть крышку и отреагировать, закрыв крышку, как задумано. Крышка также может определять, прерывает ли ее путь посторонний предмет, и реагирует на это, автоматически снова открываясь, как лифт. Его можно закрыть нажатием кнопки, вручную или через приложение.
Результаты
В общей сложности три поколения роботов уже доставили более 80 000 заказов. Сборка третьего поколения идет полным ходом, каждый день с конвейера сходят новые R3. Например, робот №126 борется со сугробами Иннополиса.
Пока №127 сейчас любуется кактусами и пальмами Аризоны.
Будут ли новые версии наших роботов? Это вполне возможно. Мы постоянно анализируем удобство нашей службы доставки для пользователей и смотрим, что можно улучшить в аппаратном плане. Программное обеспечение постоянно совершенствуется, и для некоторых новых функций может потребоваться аппаратная поддержка. Наша работа не заканчивается выпуском третьего поколения — она только начинается.
Памяти: Роботы-доставщики Яндекса ушли, но не забыты
Пришли в среду, пришли с миром.
17 ноября 2021 года ознаменовалось появлением роботов-доставщиков еды Яндекса в кампусе Университета Аризоны. Они были мгновенным культурным феноменом.
Студенты не могли не смотреть на роботов, когда они проезжали мимо, некоторые даже останавливали автоматы на своем пути, прыгая на их пути.
«Мы видим огромный интерес со стороны студентов. Чаще всего в кампусах мы сталкиваемся с тем, что студенты хотят с ними сфотографироваться. Им также нравится бросать вызов роботу, чтобы увидеть, что произойдет, если они встанут перед ним. Так что студенческая любознательность действительно поражает, и я думаю, что они в восторге от этих роботов», — рассказала Wildcat руководитель отдела по связям с общественностью Яндекса Юлия Швейко в предыдущей статье.
БОЛЬШЕ ИЗ ЕЖЕДНЕВНОГО ДИКОГО КОТА
UA стал вторым университетом в стране, который стал партнером Яндекса и Grubhub, чтобы предоставить альтернативный способ доставки еды голодным студентам. Хотя роботы помогли уменьшить объем заказов на доставку, казалось, что бремя было переложено на работников ресторана, обрабатывающих большее количество заказов.
Томас Наджор учится на первом курсе экономического факультета и работал в Einstein’s Bagels в Мемориальном центре студенческого союза, пока роботы Яндекса еще доставляли товары. Наджор сказал, что заказы на доставку от роботов накапливались в существующем количестве заказов, которые должны были обрабатывать рабочие Эйнштейна, что могло стать непосильным.
«С одной стороны, мне очень нравится работать с ними в качестве парня, раздающего заказы, — сказал Наджор. «Я бы сказал, что более сложная часть работы с ними связана с самой линией, потому что мы получаем все заказы одновременно. Таким образом, мы будем получать заказы в магазине одновременно с самовывозом, который уже осуществляется из Grubhub, а затем, помимо этого, у нас будут поставки от реальных доставщиков Grubhub, а затем роботы».
Наджор оценил, основываясь на собственном опыте, что использование роботов значительно выросло с момента их внедрения в ноябре.
«Действительно, за последние два месяца мы перешли от шести в день к, вероятно, по меньшей мере сотне», — сказал Наджор.
Роботы оставили в UA больше, чем просто экономический след. У некоторых студентов установилась эмоциональная связь.
«Приятно видеть их здесь», — сказала Ананья Шах, студентка-первокурсник биологического факультета. «Они милые.»
Еще одним привлекательным аспектом роботов было их удобство.
«Если они предлагают, я честно предпочитаю [роботов]», — сказала Кэти Смит, первокурсница и студентка бизнес-школы в Колледже управления Эллера. «Я просто в половине случаев не люблю разговаривать с людьми, когда заказываю доставку еды. Мне они очень нравятся, если честно, так намного проще».
У других появилось необъяснимое отвращение к катящимся по тротуару большим белым кубам и выражаемому им сочувствию.
«Я думаю, что это просто странно, вроде как сочувствовать машине и называть ее милой», — сказал Ян Макартур, первокурсник, изучающий архитектурное проектирование и самопровозглашенный антиботтер. «Что-то в этом меня раздражает, и я думаю: «Нет, это металлический ящик, который катится мне по тротуару».
МакАртур был участником сервера Discord на базе UA, который участвует в дискуссиях Яндекса. Пользователи сервера обычно делятся на два лагеря: сторонники ботов и противники ботов.
СВЯЗАННЫЕ: Представитель Пол Госар выступает на мероприятии College Republicans United в кампусе
Возражения против роботов также распространялись на их потенциально вредные социальные и политические последствия.
«Это машины, созданные безмозглой мегакорпорацией, управляемой русскими олигархами, чтобы отнимать рабочие места у честных работников, которым, возможно, недоплачивают, но недоплата лучше, чем буквальное отсутствие работы, что они и пытаются сделать. . Мы продолжаем поддерживать такие вещи, как Яндекс, не говоря об этических и социальных соображениях», — сказал Зейн Ландерс, еще один откровенный противник ботов на сервере Discord.
«Я полностью согласна с мнением, но я сторонник ботов, потому что я думаю, что мы можем создать систему доставки еды с очаровательными роботами с соблюдением этических норм», — сказала Фарида Бауаб, студентка-второкурсник психологии, которая также является членом Дискорд. «Просто надо менять систему. Так что проблема не в роботах. Это система, в которой они работают».
Как бы то ни было, антиботтеры добьются своего.
3 марта из кампуса прекратили работу роботы-доставщики еды Яндекса из-за продолжающейся войны в Украине.
«В связи с вторжением России в Украину, Arizona Student Unions и Arizona Dining прекратят вести дела с Яндексом, российской многонациональной публичной компанией и поставщиком оборудования для роботов-курьеров в кампусе, с сегодняшнего дня, 3 марта, 2022», — написали в Instagram Студенческие союзы Аризоны.
Роботов спас Discord-сервер «Яндекспостинга».
Следуйте за Кристианом Барняком на Twitter
Давайте приедем к вам. The Daily Wildcat, прямо в ваш почтовый ящик. Новости. Наука/Здоровье. Спортивный. Искусство/Образ жизни. Твой выбор. Вы отмените в любое время.
Зарегистрируйтесь сейчас
Как Яндекс планирует расширить свою службу доставки автономных роботов
Хотите узнать, что ждет игровую индустрию в будущем? Присоединяйтесь к руководителям игровой индустрии, чтобы обсудить новые отрасли индустрии в октябре этого года на GamesBeat Summit Next. Зарегистрируйтесь сегодня.
COVID-19кризис здравоохранения в большей части США, по-видимому, ускорит внедрение самоуправляемых роботов и дронов для перевозки грузов. Они требуют дезинфекции, которую такие компании, как Kiwibot, Starship Technologies и Postmates, проводят вручную санитарными бригадами. Но в некоторых случаях марсоходы доставки, такие как Refraction, могут свести к минимуму риск распространения болезни. Согласно недавним рыночным отчетам Allied Market Research и Infiniti, ежегодный рост сектора доставки «последней мили» в течение следующих 10 лет превысит 14 %, а сегмент автономной доставки, по прогнозам, вырастет более чем на 24 % с 11,9 долл. США.миллиардов в 2021 году до более чем 84 миллиардов долларов к 2031 году. и московский район Сколково в прошлом году, Яндекс говорит, что парк его роботов доставлял клиентам документы, посылки и многое другое.
Вскоре Яндекс планирует запустить сервис в Анн-Арборе, штат Мичиган, который станет первым автономным сайтом доставки компании в США. stack для своей сети доставки и инноваций, которые могут быть применены к проектам в других подразделениях компании.
Первые дни
Яндекс впервые раскрыл Яндекс.Ровер в ноябре 2019 года. Проект в рамках подразделения беспилотных автомобилей Яндекс.Ровер был создан, чтобы начать с доставки небольших посылок, а затем в конечном итоге обрабатывать еду в рамках Яндекс. Еда Яндекса. платформа и продукты от Яндекс.Лавки.
Событие
MetaBeat 2022
MetaBeat соберет лидеров мнений, чтобы дать рекомендации о том, как технология метавселенной изменит способ общения и ведения бизнеса во всех отраслях, 4 октября в Сан-Франциско, Калифорния.
Зарегистрируйтесь здесь
Шестиколесный вездеход Яндекса, размером примерно с небольшой чемодан, использует некоторые технологии, лежащие в основе автономных автомобилей компании, чтобы путешествовать «со скоростью пешехода». Он способен обходить препятствия в большинстве погодных условий в светлое и темное время суток, но в районах, где он развернут в настоящее время, Яндекс говорит, что за его действиями может следить удаленный оператор.
Клиенты используют приложение для организации доставки, указав место высадки, после чего один из вездеходов Яндекса едет по тротуарам и пересекает перекрестки в радиусе «несколько километров». Из того же приложения покупатели могут удаленно открывать отсек для хранения робота и отслеживать его перемещения на карте или обращаться за помощью к инженеру Яндекса.
«Марсоходы управляются тем же стеком технологий, что и наши беспилотные автомобили. Мы приняли его для этой новой платформы, которая использует те же подходы и решения», — сообщил Полищук VentureBeat по электронной почте. «Конфигурация датчиков на вездеходе отличается от автомобилей, но это все те же типы датчиков. Это позволяет нам повторно использовать модели восприятия от автомобилей для обнаружения транспортных средств, пешеходов, статических препятствий и других дорожных объектов, а также использовать существующие конвейеры маркировки и обучения для разработки новых моделей».
Собственные инструменты
По словам Полищука, Яндекс использует ряд инструментов, разработанных собственными силами, для повышения производительности своих марсоходов. Одним из них является Яндекс.Толока, краудсорсинговый сервис маркировки наборов данных, который предоставляет возможность аннотировать данные в масштабе. Еще одно веб-приложение — Nirvana — создает воспроизводимые конвейеры обучения и тестирования для моделей машинного обучения, которые передаются в облако хранения и вычислений под названием Yt, предназначенное для аналитики.
«Использование запатентованных решений позволяет нам быстро настраивать или настраивать эти инструменты под конкретные нужды команды самоуправляемых автомобилей, — пояснил Полищук. «Например, в Толоке мы создали специальные инструменты для маркировки объектов в 3D по совместным данным лидаров, камер и радаров. И, конечно же, использование собственной облачной инфраструктуры значительно дешевле, чем использование внешних сервисов».
В случае с Яндекс.Ровером команда Яндекса, занимающаяся беспилотным вождением, смогла перепрофилировать некоторые модели прогнозирования, разработанные для автомобилей компании, на своих роботов, например, для прогнозирования того, где могут пройти пешеходы. Команда также использует симулятор, первоначально разработанный для тестирования программного обеспечения автомобилей для проверки и точной настройки алгоритмов марсоходов.
«Решения на основе машинного обучения очень помогают нашим автомобилям [и вездеходам] предсказывать поведение других агентов в ситуациях, которые строго не регламентируются правилами дорожного движения. По сравнению с автомобилями движение людей по тротуарам менее структурировано и, таким образом, создает еще большую неопределенность», — сказал Полищук. «Мы используем новейшие решения для планирования движения на основе машинного обучения, чтобы помочь роботам безопасно и разумно перемещаться по оживленным тротуарам».
Картографирование — еще одна область, в которой автономные автомобили Яндекса помогли своим роботам. Роверам нужны карты высокой четкости, чтобы позиционировать себя в реальном мире, и части карт могут быть построены с помощью датчиков автомобилей. Датчики достаточно чувствительны, чтобы фиксировать поверхность тротуара — роботам нужно только улучшить карту там, где вид с улицы закрыт другими объектами.
Разработка оборудования
В настоящее время парк доставки Яндекса насчитывает около 35 роботов, большая часть которых осуществляет доставку из Яндекс. Еды и Яндекс.Лавки в четырех районах Москвы и городе Иннополис. По словам Полищук, несколько дополнительных роботов используются для целей тестирования и для картирования новых мест доставки.
В течение первых нескольких месяцев 2020 года команда Яндекса начала тестировать различные конфигурации оборудования и датчиков для марсоходов, в конечном итоге остановившись на платформе ARM, оснащенной лидарным датчиком, гидролокатором, камерами и радарами по бокам для обнаружения транспортных средств. при переходе улицы. Поставки в зимние месяцы выявили новые проблемы, которые привели к модернизации, включая настройку системы планирования скорости роверов, которая могла лучше справляться с обледенелыми дорожками. Команда также улучшила энергопотребление, чтобы роботы могли работать до 10 часов без подзарядки даже в холодную снежную зимнюю погоду.
Форм-фактор вездеходов также претерпел некоторые изменения в ответ на отзывы клиентов. Например, его блок хранения увеличился в размерах и получил крышку, которая открывается и закрывается автоматически, так что каждая доставка осуществляется бесконтактно.
Будущая работа
Помимо Анн-Арбора, Яндекс сообщает, что отправляет марсоходы в Израиль и Южную Корею для тестирования автономной доставки. В будущем Яндекс предполагает, что роботы появятся на платформах электронной коммерции для выполнения заказов и доставки или на собственных складах и центрах обработки данных компании для перевозки грузов. По словам Полищука, Яндекс сейчас ведет «активные переговоры» о партнерстве с компаниями в России и за рубежом.
Помимо Яндекса, такие стартапы, как Marble, Starship, Nuro, Robomart, Boxbot, FedEx, Refraction AI, Dispatch и Robby, борются за долю на рынке доставки роботов с автоматическим управлением. Amazon тестирует своих роботов Scout в некоторых частях Южной Калифорнии, расширяя пилотную программу технологического гиганта из округа Снохомиш, штат Вашингтон. И в знак конкурентоспособности сегмента Postmates X, принадлежащая Uber, подразделение Postmates, разрабатывающее автономных роботов для доставки, недавно выделилось в отдельную компанию.
«Пандемия меняет доставку последней мили как для клиентов, так и для бизнеса. Спрос на бесконтактную доставку изменил протоколы взаимодействия курьеров с клиентами, и роботы идеально вписались в эту новую реальность», — сказал Полищук. «Мы думаем, что идеальное сочетание людей-курьеров и вездеходов заключается в эффективном разделении заказов. Роверы могут выполнять гиперлокальные заказы рядом с магазином или рестораном, в то время как люди могут доставлять остальное — поскольку они быстрее преодолевают большие расстояния — используя велосипеды, скутеры или общественный транспорт… Такое разделение заказов между людьми и роботами может помочь улучшить обслуживание. текущее время доставки последней мили, даже с постоянно растущим спросом».
Миссия VentureBeat — стать цифровой городской площадью, на которой лица, принимающие технические решения, смогут получить знания о передовых корпоративных технологиях и заключать сделки. Откройте для себя наши брифинги.
Российский Яндекс увольняет два десятка американских рабочих из своих команд роботов и беспилотных автомобилей это
Эндрю Дж. Хокинс / @andyjayhawk
|
Поделиться этой историей
Яндекс, многомиллиардная технологическая компания, базирующаяся в России, до вторжения в Украину эксплуатировала автономные транспортные средства в Мичигане. Яндекс
Яндекс, многомиллиардная российская технологическая компания, управляющая небольшим парком автономных транспортных средств в Анн-Арборе, штат Мичиган, уволила более двух десятков американских рабочих в начале этого месяца, заявив, что ее лицензии на транспортные средства были приостановлены регулирующими органами штата Мичиган, Грань узнала. Но Мичиган говорит, что это неправда.
Через несколько дней после вторжения России в Украину «Яндекс» приостановил тестирование антивируса в Анн-Арборе, а также тесты с шестиколесными роботами-доставщиками в нескольких университетских городках в Огайо и Аризоне. Но пауза должна была быть временной — компания заявила, что надеется возобновить эти операции позже.
Яндекс утверждает, что 9 марта ему сообщили, что его лицензии на транспортные средства были приостановлены Министерством транспорта штата Мичиган (MDOT). Компания подтвердила, что шесть водителей-безопасников из Анн-Арбора были уволены. (По словам одного из бывших сотрудников, в городе работало в Яндексе около 15 человек.) Кроме того, Яндекс также уволил 21 работника в Аризоне и Огайо, которые выполняли функции вспомогательного персонала на местах для роботов-доставщиков компании.
«Запросов на их отмену не поступало»
Государство, однако, утверждает, что приостановление действия лицензий Яндекса не соответствует действительности. По словам Трейси Уиммер, пресс-секретаря госсекретаря штата Мичиган, у Яндекса все еще есть 14 действительных номеров производителей, зарегистрированных в штате. «Мы не получали запросов на их отмену», — говорит она. Что касается MDOT, то у у был контракт с Яндексом на управление автономным сервисом во время Североамериканского международного автосалона 2021 года в Детройте, но этот контракт был расторгнут 1 июля из-за пандемии.
«У MDOT больше не было дел с Яндексом», — сказал Крэнсон.
Компания запустила пилотный проект по доставке роботов в нескольких университетах Аризоны и Огайо с планами расширения до сотен других. Яндекс
Но это не то, что Яндекс сказал своим сотрудникам — или The Verge. Яндекс, который называют «Google России», настаивает на том, что государство оказало на него давление, чтобы оно закрыло свою операцию по тестированию автономных транспортных средств в Анн-Арборе. «В начале марта 2022 года юрисконсульт компании провел обсуждение с MDOT, и ему было предложено приостановить его дорожные операции», — сообщила Юлия Швейко, представитель «Яндекса», в электронном письме. «9 мартаМы были проинформированы Министерством транспорта Мичигана о том, что наша лицензия на тестирование была приостановлена. Тестирование на дороге без лицензии невозможно, поэтому нам пришлось уволить 6 водителей-безопасников в Анн-Арборе».
На просьбу ответить на информацию, предоставленную МДОТ и госсекретарем, Шевыко отказался. «Я поделилась с вами всеми подробностями с нашей стороны, доступными на данный момент», — сказала она.
Один сотрудник сказал, что ему сообщили, что губернатор Мичигана Гретхен Уитмер получила жалобы на российскую компанию, собирающую данные о трафике на улицах общего пользования, и приказала приостановить действие лицензий Яндекса. (Представитель губернатора отложил комментарий для MDOT.)
«Мы были ошеломлены», — сказал бывший сотрудник «Яндекса». «И нам сказали, что это губернатор Мичигана, почему нам пришлось прекратить деятельность».
«Мы были ошеломлены»
Яндекс уже более десяти лет заинтересован в ведении бизнеса в США. В 2009 году компания открыла лабораторию Яндекса в Пало-Альто, в 10 минутах езды от штаб-квартиры Google. Компания стремилась нанять почти два десятка инженеров, которые могли бы поделиться с Москвой последними тенденциями в Силиконовой долине, по данным Проводной .
Этот интерес расширился за счет включения автономных транспортных средств после того, как подразделение Яндекса по вызову такси, Яндекс Такси, приобрело весь бизнес Uber в России в 2017 году. Две компании создали совместное предприятие, а несколько руководителей Uber вошли в совет директоров Яндекса. Год спустя «Яндекс» запустил в Москве то, что он назвал «первым в мире роботизированным такси». Компания продемонстрировала полностью беспилотный автомобиль на выставке CES в Лас-Вегасе в 2020 году, а затем начала испытания беспилотных автомобилей в Анн-Арборе. Позже в том же году он запустил пилотный проект по доставке роботов с Grubhub с планами потенциального расширения до 250 дополнительных кампусов колледжей.
Эти планы были нарушены вторжением России в Украину. Uber удалил своих руководителей из совета директоров Яндекса и, инициировав продажу своей доли в Яндексе в августе прошлого года, ускорил этот процесс после вторжения. Grubhub прекратил сотрудничество с Яндексом, как и поисковая система DuckDuckGo, ориентированная на конфиденциальность.
В Анн-Арборе небольшая команда Яндекса была потрясена вторжением, сказал бывший сотрудник. Многие из сотрудников являются иммигрантами с семьей в России и друзьями в Украине. И, несмотря на попытки компании меньше зависеть от Москвы, AV-подразделение по-прежнему зависело от решений, принимаемых в штаб-квартире «Яндекса».
Изначально сообщение из Москвы должно было сидеть тихо, сказал сотрудник. «Нам сказали, что у нас есть определенное количество резервов, специально для иностранных сотрудников», — сказал сотрудник. — Значит, ты будешь в порядке.
Первоначально сообщение из Москвы должно было сидеть тихо
Даже запрет России на SWIFT, международную платежную систему, используемую банками для отправки денег по всему миру, казалось, был воспринят спокойно. Но затем, 10 марта, Яндекс сообщил команде Анн-Арбора, что их собираются уволить. Номерные знаки были сняты с тестовых автомобилей, и им сказали, что их страховая компания отменила их полис.
«Если бы нас не закрыл губернатор, я искренне верю, что они, вероятно, оплатили бы счет еще на месяц», — сказал сотрудник в интервью, которое было проведено до того, как госорганы ответили на претензии Яндекса.
После того, как регулирующие органы штата указали, что у Яндекса все еще есть действующие лицензии на транспортные средства, сотрудник напомнил, что некоторые коллеги выразили сомнения по поводу утверждения о том, что губернатор Уитмер несет косвенную ответственность за увольнения. Один из бывших сотрудников Яндекса сказал, что они связались с местным законодательным органом Мичигана, чтобы подтвердить это, но не смогли, согласно снимку экрана группового чата, которым поделились с 9.0243 Грань .
«Насколько я могу судить, законодатель моего штата ничего не слышал о вытягивании лицензий губернатором», — сказал сотрудник в чате.
«Потому что это подделка», — ответил другой. «Но эй, что бы ни помогало им спать по ночам».
Most Popular
Nvidia announces next-gen RTX 4090 and RTX 4080 GPUs
GTA 6 gameplay leaks online in 90 videos
Beyond Meat COO reportedly attempts to consume human nose
Сообщается, что у первого крупного редизайна Sony PS5 будет съемный дисковод
- Эндрю Хадсон
- 19 августа 2021 г.
- Столовая, Мобильная
Grubhub и разработчик автономных транспортных средств, Yandex Self-Driving Group (SDG), развернет роботизированную доставку в Университете штата Огайо. Развертывание в штате Огайо знаменует собой первое университетское предприятие в рамках недавно объявленного партнерства между двумя компаниями.
Роботизированная доставка будет доступна для более чем 60 000 студентов и сотрудников OSU, а еда будет предлагаться из столовых на территории кампуса через Grubhub. Яндекс предоставит парк из 50 роботов компании, работающих в кампусе ОГУ.
«Мы гордимся тем, что предлагаем студентам исключительное питание, и мы всегда ищем новые способы сделать еду в кампусе максимально удобной», — говорит Зия Ахмед, старший директор отдела питания в штате Огайо. Университет.
Роверы обеспечат доставку с 9:00 до 21:00. семь дней в неделю. Студенты могут попросить роботов доставить еду в каждое общежитие на территории кампуса, а также во множество других популярных мест кампуса.
Роботы Яндекса автономно перемещаются по тротуарам, пешеходным переходам кампуса и пешеходным зонам. Роботы могут перемещаться по большому университетскому кампусу со скоростью 3-5 миль в час в дневное и вечернее время, а также в различных погодных условиях, включая дождь и снег.
«OSU и Grubhub много лет работали вместе, чтобы предложить студентам разнообразные способы насладиться едой, которую они любят в кампусе», — говорит Брайан Мэдиган, вице-президент по корпоративным и студенческим партнерам в Grubhub. «Теперь мы развиваем наши усилия по улучшению качества обслуживания с помощью технологии марсохода Яндекса для более быстрой и простой доставки».
Роботы достаточно большие, чтобы вместить несколько кофейных чашек и пакетов с едой или несколько коробок для пиццы, а также поддерживать нужную температуру еды.
«Марсоходы не только расширяют существующие возможности доставки еды, но и открывают новые возможности для более умного, качественного и быстрого обеда», — говорит Питер Селей, руководитель отдела развития бизнеса в Yandex SDG. «Представьте, что вы заказываете утренний кофе и берете его у робота, ожидающего у вас на пороге, когда вы идете на урок, или занимаетесь в парке с друзьями и просите марсоход приехать и доставить закуски. Мы очень рады помочь воплотить эти возможности в жизнь».
Для получения дополнительной информации о доставке роботов Grubhub и Yandex посетите grubhub.com.
- Теги:
- Мобильные приложения, мобильные учетные данные
Недавние сообщения, которые могут вам понравиться
CampusIDChats: Apex Smart Lockers
В этом выпуске CampusIDChats мы продолжаем обсуждение будущего столовой в кампусе и, в частности, изучаем роль…
Штат Миссури запускает роботизированную доставку with Starship
Университет штата Миссури запустил доставку роботов, доставив Starship Technologies в свой кампус в Спрингфилде.
Starship предоставляет флот из…Веб-семинар: Доступ без ключа в общежитиях не только для больших…
В среду, 21 сентября 2022 г., руководители Суортморского колледжа и Университета Денисона представят свой опыт на вебинаре, организованном…
Умные шкафчики: интеллектуальное расширение технологий HID для кампуса
С появлением новых сервисных возможностей, таких как предварительный заказ и мобильный заказ, все больше университетов внедряют…0247
Северный университет Огайо запустил роботизированную доставку в кампусе на этой неделе с прибытием Kiwibot в кампус Ады, штат Огайо.…
Хьюстон-Клир-Лейк запускает приложение безопасности при реагировании на чрезвычайные ситуации
Университет Хьюстон-Клир-Лейк открыл новый кампус этой осенью приложение безопасности на платформу безопасности кампуса. В…
Франклин и Маршалл добавили роботов для доставки еды от Kiwibot
Колледж Франклина и Маршалла добавил роботов для доставки еды от Kiwibot.